 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDimensional synthesis of spatial manipulators for velocity and force transmission for operation around a specified task point
Oct 10, 2022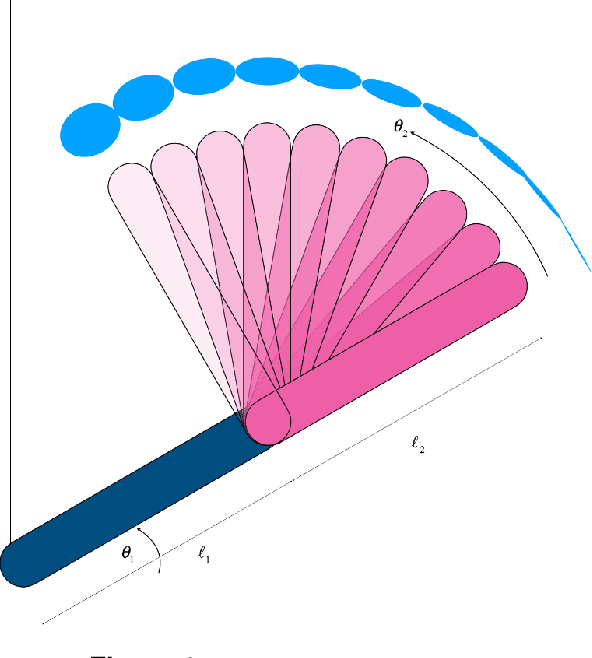
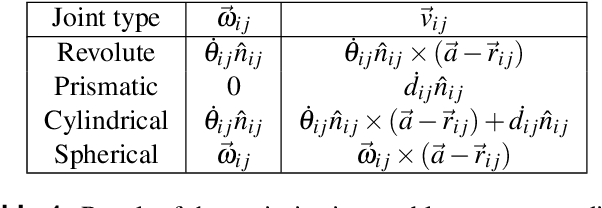
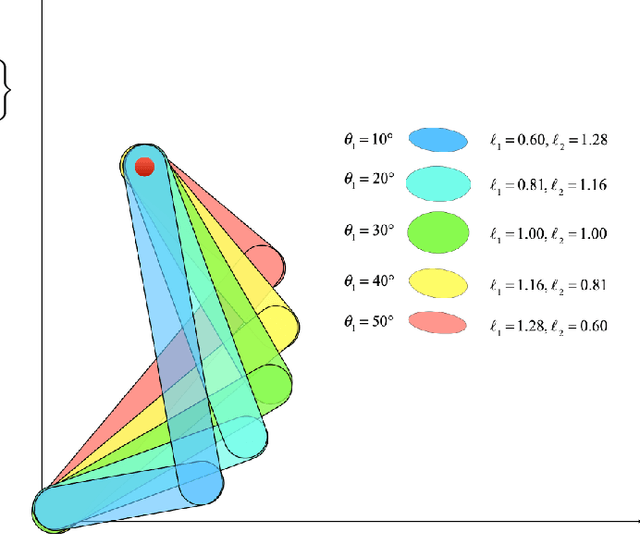
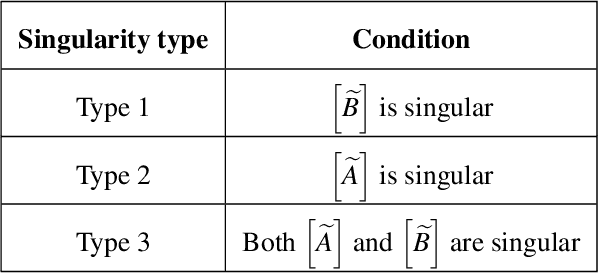
Dimensional synthesis refers to design of the dimensions of manipulators by optimising different kinds of performance indices. The motivation of this study is to perform dimensional synthesis for a wide set of spatial manipulators by optimising the manipulability of each manipulator around a pre-defined task point in the workspace and to finally give a prescription of manipulators along with their dimensions optimised for velocity and force transmission. A systematic method to formulate Jacobian matrix of a manipulator is presented. Optimisation of manipulability is performed for manipulation of the end-effector around a chosen task point for 96 1-DOF manipulators, 645 2-DOF manipulators, 8 3-DOF manipulators and 15 4-DOF manipulators taken from the result of enumeration of manipulators that is done in its companion paper devoted to enumeration of possible manipulators up to a number of links. Prescriptions for these sets of manipulators are presented along with their scaled condition numbers and their ordered indices. This gives the designer a prescription of manipulators with their optimised dimensions that reflects the performance of the end-effector around the given task point for velocity and force transmission.
Enumeration of spatial manipulators by using the concept of Adjacency Matrix
Oct 07, 2022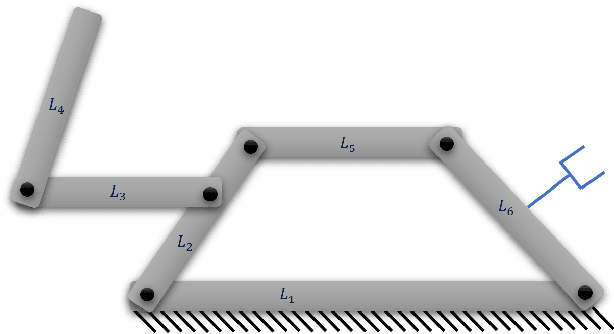
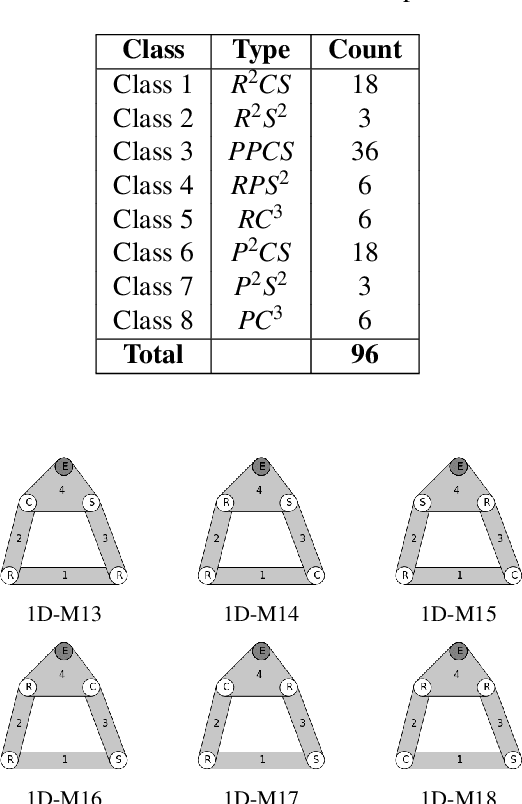
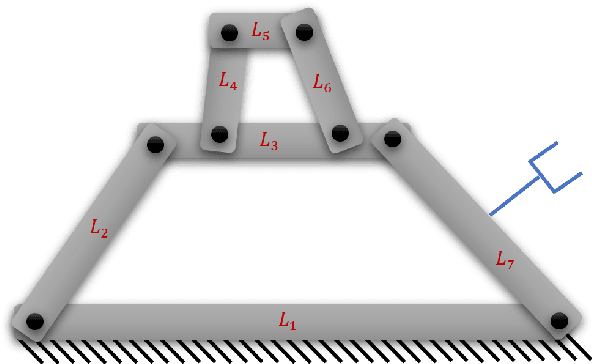
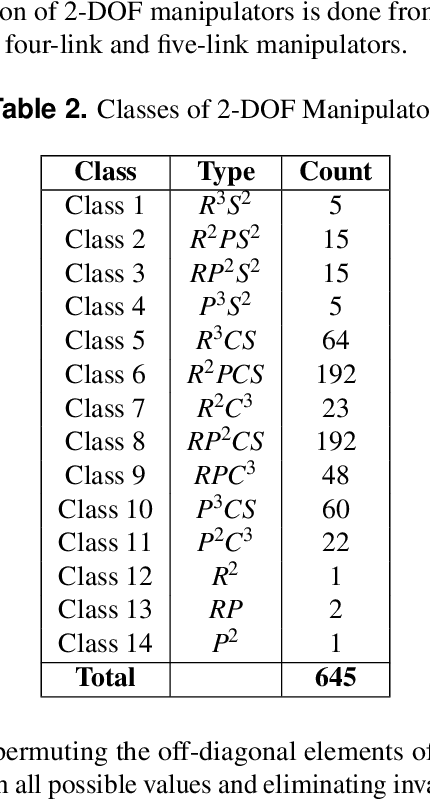
This study is on the enumeration of spatial robotic manipulators, which is an essential basis for a companion study on dimensional synthesis, both of which together present a wider utility in manipulator synthesis. The enumeration of manipulators is done by using adjacency matrix concept. In this paper, a novel way of applying adjacency matrix to spatial manipulators with four types of joints, namely revolute, prismatic, cylindrical and spherical joints, is presented. The limitations of the applicability of the concept to 3D manipulators are discussed. 1-DOF (Degree Of Freedom) manipulators of four links and 2-DOF, 3-DOF and 4-DOF manipulators of three links, four links and five links, are enumerated based on a set of conventions and some assumptions. Finally, 96 1-DOF manipulators of four links, 641 2-DOF manipulators of 5 links, 4 2-DOF manipulators of three links, 8 3-DOF manipulators of four links and 15 4-DOF manipulators of five links are presented.