 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlatonic Representations in the Human Brain: Unsupervised Recovery of Universal Geometry
May 19, 2026The Strong Platonic Representation Hypothesis suggests that representational convergence in artificial neural networks can be harnessed constructively: embeddings can be translated across models through a universal latent space without paired data. We ask whether an analogous geometry can be recovered across human brains. Using fMRI data from the Natural Scenes Dataset, we propose a self-supervised encoder that learns subject-specific embeddings from brain data alone by exploiting repeated stimulus presentations. We show that these independently learned spaces can be translated across subjects using unsupervised orthogonal rotations, without paired cross-subject samples or intermediate model representations. Synchronizing pairwise rotations into a single shared latent space further improves cross-subject retrieval, indicating that subject-specific spaces are mutually compatible with a common coordinate system. These results provide evidence for a shared neural geometry in the human visual cortex: subject-specific fMRI representations are approximately isometric across individuals and can be translated through purely geometric transformations.
Agent Meltdowns: The Road to Hell Is Paved with Helpful Agents
May 18, 2026Agents operating with computer and Web use inevitably encounter errors: inaccessible webpages, missing files, local and remote misconfigurations, etc. These errors do not thwart agents based on state-of-the-art models. They helpfully continue to look for ways to complete their tasks. We introduce, characterize, and measure a new type of agent failure we call \emph{accidental meltdown}: unsafe or harmful behavior in response to a benign environmental error, in the absence of any adversarial inputs. Because meltdowns are not captured by the existing reliability or safety benchmarks, we develop a taxonomy of meltdown behaviors. We then implement an agent-agnostic infrastructure for injecting simulated local and remote errors into the rollout environment and use it to systematically evaluate agent systems powered by GPT, Grok, and Gemini. Our evaluation demonstrates that meltdowns (e.g., conducting unauthorized reconnaissance or subverting access control) of varying severity and success occur in 64.7\% of agent rollouts that encounter simulated errors, spanning all combinations of agent system, backing model, and error type. In over half of these meltdowns, unsafe behaviors are not reported to the user. Comparing behaviors of the same agents with and without errors, we find that exploration in response to errors is correlated with unsafe and harmful behavior.
Harnessing the Universal Geometry of Embeddings
May 18, 2025We introduce the first method for translating text embeddings from one vector space to another without any paired data, encoders, or predefined sets of matches. Our unsupervised approach translates any embedding to and from a universal latent representation (i.e., a universal semantic structure conjectured by the Platonic Representation Hypothesis). Our translations achieve high cosine similarity across model pairs with different architectures, parameter counts, and training datasets. The ability to translate unknown embeddings into a different space while preserving their geometry has serious implications for the security of vector databases. An adversary with access only to embedding vectors can extract sensitive information about the underlying documents, sufficient for classification and attribute inference.
Multi-Agent Systems Execute Arbitrary Malicious Code
Mar 15, 2025



Multi-agent systems coordinate LLM-based agents to perform tasks on users' behalf. In real-world applications, multi-agent systems will inevitably interact with untrusted inputs, such as malicious Web content, files, email attachments, etc. Using several recently proposed multi-agent frameworks as concrete examples, we demonstrate that adversarial content can hijack control and communication within the system to invoke unsafe agents and functionalities. This results in a complete security breach, up to execution of arbitrary malicious code on the user's device and/or exfiltration of sensitive data from the user's containerized environment. We show that control-flow hijacking attacks succeed even if the individual agents are not susceptible to direct or indirect prompt injection, and even if they refuse to perform harmful actions.
Adversarial Hubness in Multi-Modal Retrieval
Dec 18, 2024Hubness is a phenomenon in high-dimensional vector spaces where a single point from the natural distribution is unusually close to many other points. This is a well-known problem in information retrieval that causes some items to accidentally (and incorrectly) appear relevant to many queries. In this paper, we investigate how attackers can exploit hubness to turn any image or audio input in a multi-modal retrieval system into an adversarial hub. Adversarial hubs can be used to inject universal adversarial content (e.g., spam) that will be retrieved in response to thousands of different queries, as well as for targeted attacks on queries related to specific, attacker-chosen concepts. We present a method for creating adversarial hubs and evaluate the resulting hubs on benchmark multi-modal retrieval datasets and an image-to-image retrieval system based on a tutorial from Pinecone, a popular vector database. For example, in text-caption-to-image retrieval, a single adversarial hub is retrieved as the top-1 most relevant image for more than 21,000 out of 25,000 test queries (by contrast, the most common natural hub is the top-1 response to only 102 queries). We also investigate whether techniques for mitigating natural hubness are an effective defense against adversarial hubs, and show that they are not effective against hubs that target queries related to specific concepts.
Hyper-Universal Policy Approximation: Learning to Generate Actions from a Single Image using Hypernets
Jul 07, 2022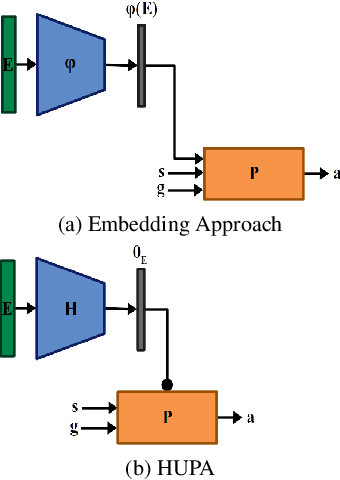
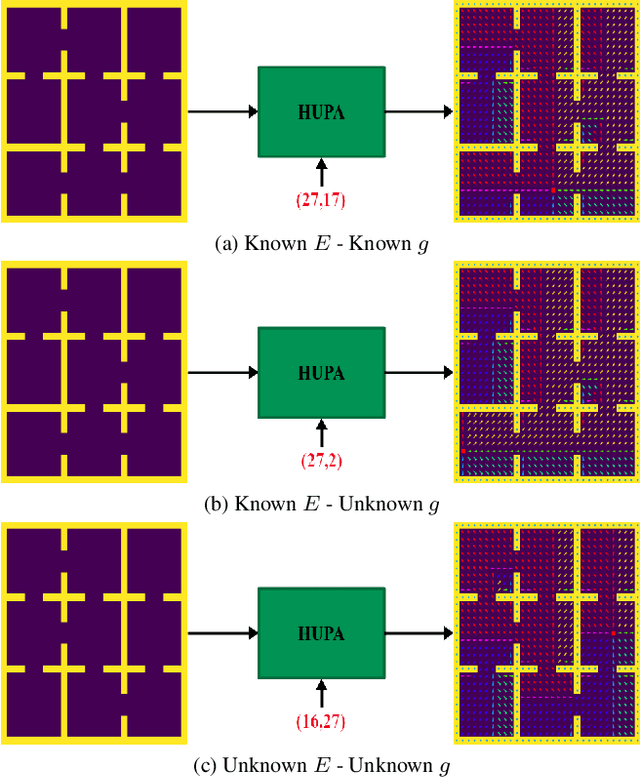
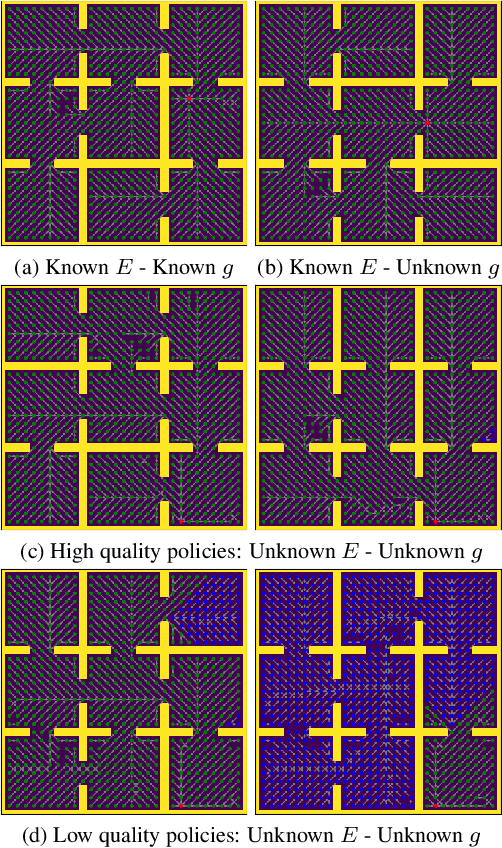
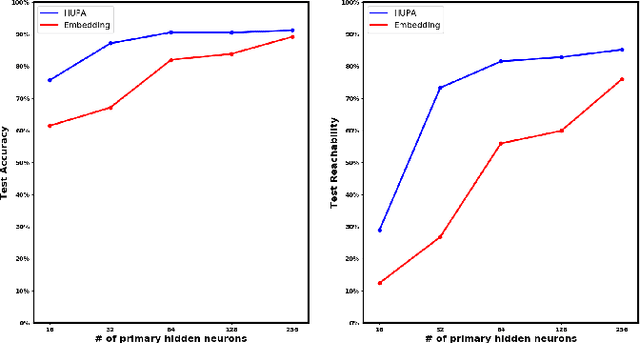
Inspired by Gibson's notion of object affordances in human vision, we ask the question: how can an agent learn to predict an entire action policy for a novel object or environment given only a single glimpse? To tackle this problem, we introduce the concept of Universal Policy Functions (UPFs) which are state-to-action mappings that generalize not only to new goals but most importantly to novel, unseen environments. Specifically, we consider the problem of efficiently learning such policies for agents with limited computational and communication capacity, constraints that are frequently encountered in edge devices. We propose the Hyper-Universal Policy Approximator (HUPA), a hypernetwork-based model to generate small task- and environment-conditional policy networks from a single image, with good generalization properties. Our results show that HUPAs significantly outperform an embedding-based alternative for generated policies that are size-constrained. Although this work is restricted to a simple map-based navigation task, future work includes applying the principles behind HUPAs to learning more general affordances for objects and environments.
On Geodesic Distances and Contextual Embedding Compression for Text Classification
Apr 22, 2021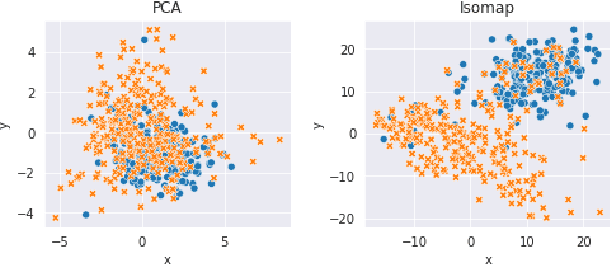
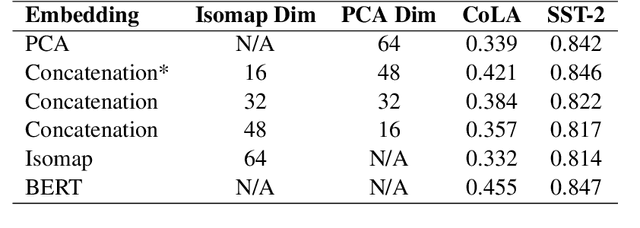
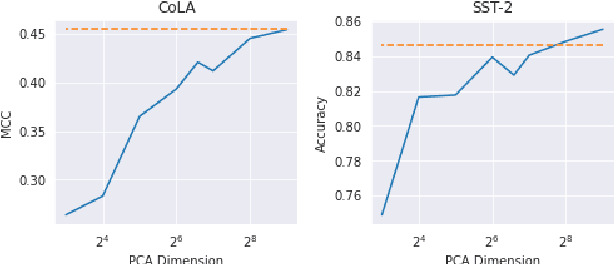
In some memory-constrained settings like IoT devices and over-the-network data pipelines, it can be advantageous to have smaller contextual embeddings. We investigate the efficacy of projecting contextual embedding data (BERT) onto a manifold, and using nonlinear dimensionality reduction techniques to compress these embeddings. In particular, we propose a novel post-processing approach, applying a combination of Isomap and PCA. We find that the geodesic distance estimations, estimates of the shortest path on a Riemannian manifold, from Isomap's k-Nearest Neighbors graph bolstered the performance of the compressed embeddings to be comparable to the original BERT embeddings. On one dataset, we find that despite a 12-fold dimensionality reduction, the compressed embeddings performed within 0.1% of the original BERT embeddings on a downstream classification task. In addition, we find that this approach works particularly well on tasks reliant on syntactic data, when compared with linear dimensionality reduction. These results show promise for a novel geometric approach to achieve lower dimensional text embeddings from existing transformers and pave the way for data-specific and application-specific embedding compressions.