 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlane Wave Elastography: A Frequency-Domain Ultrasound Shear Wave Elastography Approach
Dec 08, 2020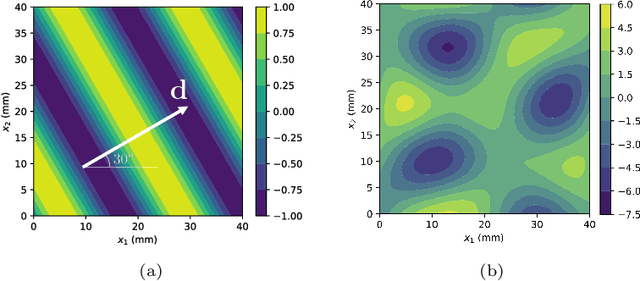
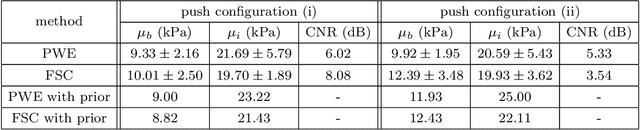
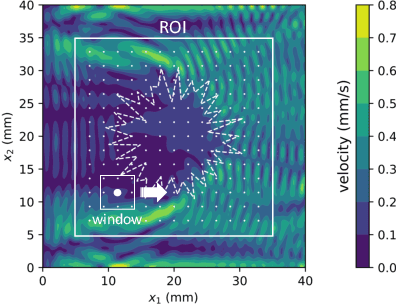
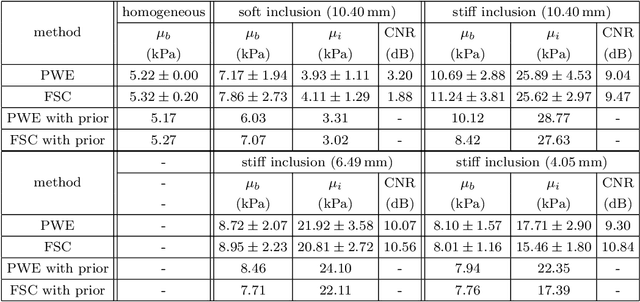
In this paper, we propose Plane Wave Elastography (PWE), a novel ultrasound shear wave elastography (SWE) approach. Currently, commercial methods for SWE rely on directional filtering based on the prior knowledge of the wave propagation direction, to remove complicated wave patterns formed due to reflection and refraction. The result is a set of decomposed directional waves that are separately analyzed to construct shear modulus fields that are then combined through compounding. Instead, PWE relies on a rigorous representation of the wave propagation using the frequency-domain scalar wave equation to automatically select appropriate propagation directions and simultaneously reconstruct shear modulus fields. Specifically, assuming a homogeneous, isotropic, incompressible, linear-elastic medium, we represent the solution of the wave equation using a linear combination of plane waves propagating in arbitrary directions. Given this closed-form solution, we formulate the SWE problem as a nonlinear least-squares optimization problem which can be solved very efficiently. Through numerous phantom studies, we show that PWE can handle complicated waveforms without prior filtering and is competitive with state-of-the-art that requires prior filtering based on the knowledge of propagation directions.
Model-Based Learning of Turbulent Flows using Mobile Robots
Feb 13, 2019
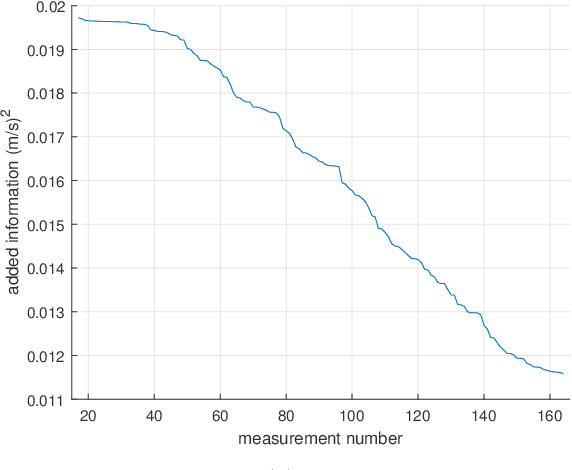
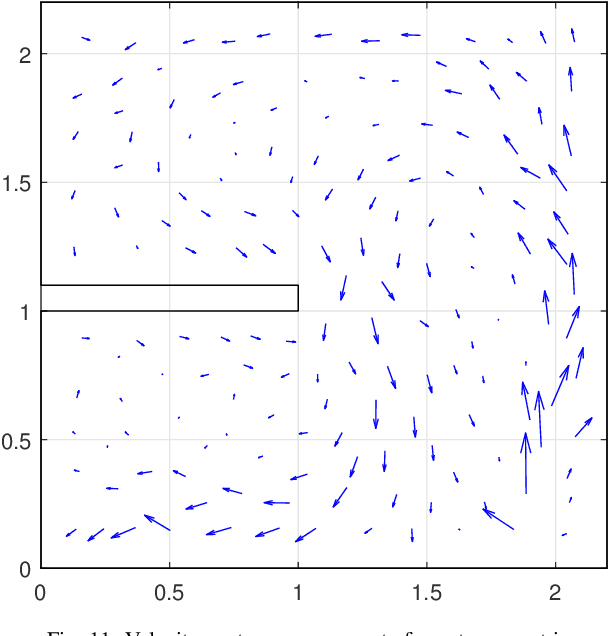
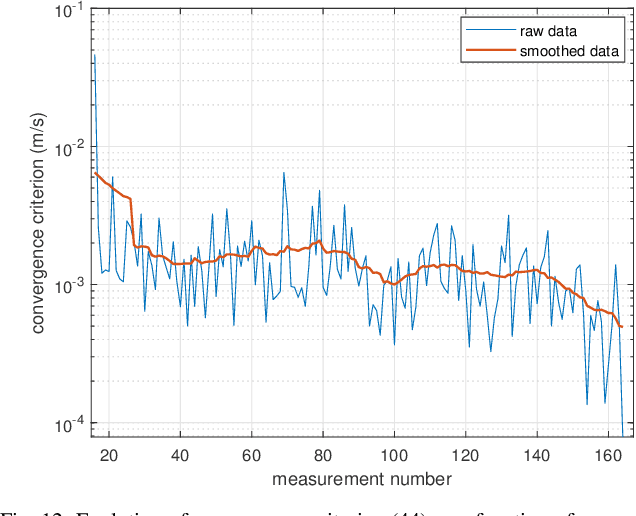
We consider the problem of model-based learning of turbulent flows using mobile robots. Specifically, we use empirical data to improve on numerical solutions obtained from Reynolds-Averaged Navier Stokes (RANS) models. RANS models are computationally efficient but rely on assumptions that require experimental validation. Here we construct statistical models of the flow properties using Gaussian Processes (GPs) and rely on the numerical solutions to inform their mean. Utilizing Bayesian inference, we incorporate measurements of the time-averaged velocity and turbulent intensity into these GPs. We account for model ambiguity and parameter uncertainty, via hierarchical model selection, and for measurement noise by systematically incorporating it in the GPs. To collect the measurements, we control a custom-built mobile robot through a sequence of waypoints that maximize the information content of the measurements. The end result is a posterior distribution of the flow field that better approximates the real flow and quantifies the uncertainty in its properties. We experimentally demonstrate a considerable improvement in the prediction of these properties compared to numerical solutions.
Deep Learning for Robotic Mass Transport Cloaking
Dec 11, 2018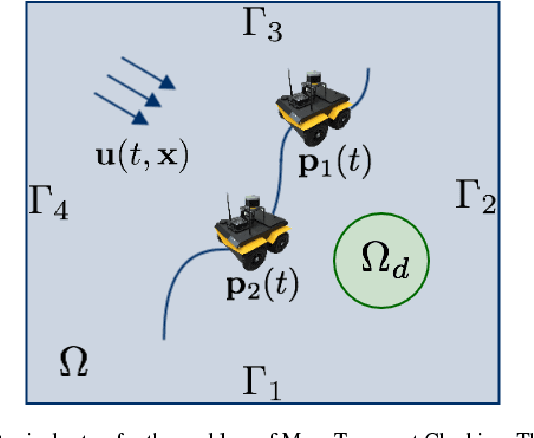
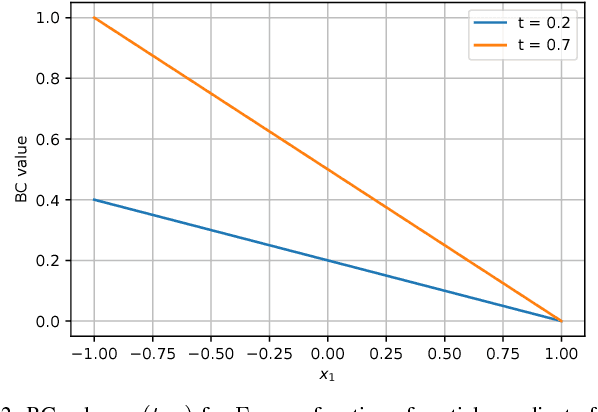
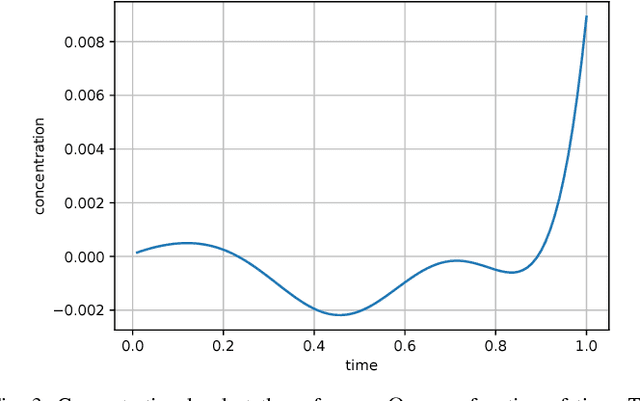
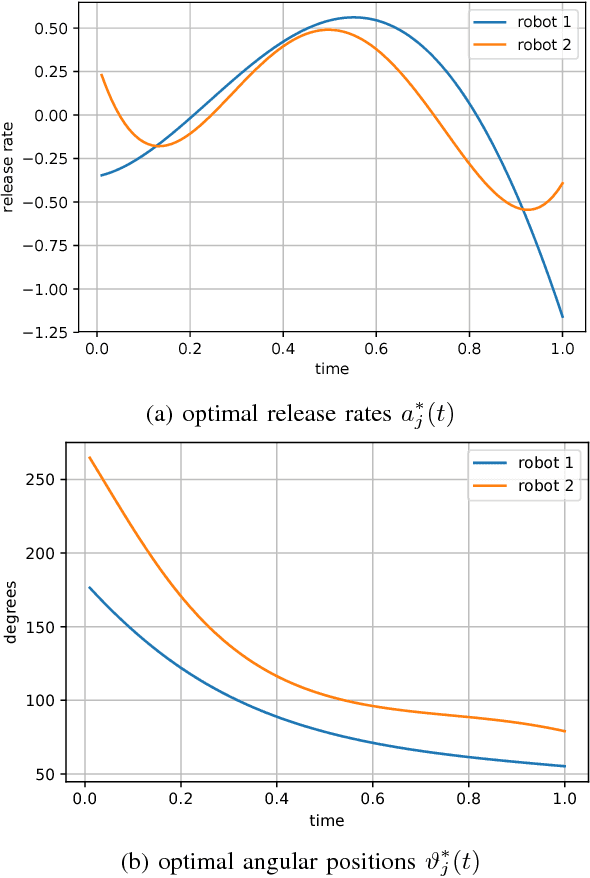
We consider the problem of Mass Transport Cloaking using mobile robots. The robots carry sources that collectively counteract a chemical agent released in the environment. The goal is to steer the mass flux around a desired region so that it remains unaffected by the external concentration. We formulate the problem of controlling the robot positions and release rates as a PDE-constrained optimization, where the propagation of the chemical is modeled by the Advection-Diffusion (AD) PDE. Since discretization-based methods, such as the Finite Element method, are computationally demanding for time-dependent problems, we use a Deep Neural Network (NN) to approximate the solution of the PDE. Particularly, we propose a novel loss function for the NN that utilizes the variational form of the AD-PDE and allows us to reformulate the planning problem as an unsupervised model-based learning problem. Our loss function is discretization-free and highly parallelizable. Unlike passive cloaking methods that use metamaterials to steer the mass flux, our method is the first to use mobile robots to actively control the concentration levels and create safe zones independent of environmental conditions.
Model-Based Active Source Identification in Complex Environments
Oct 31, 2018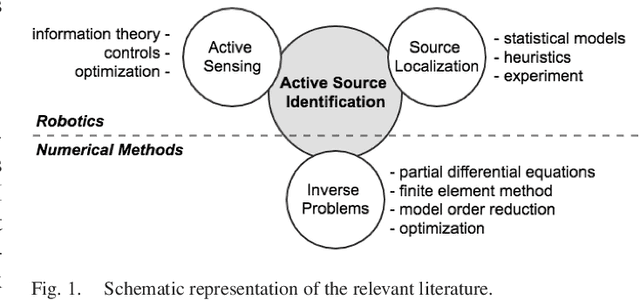
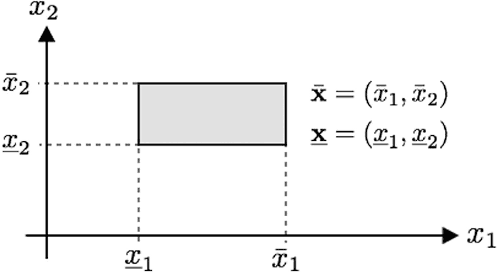
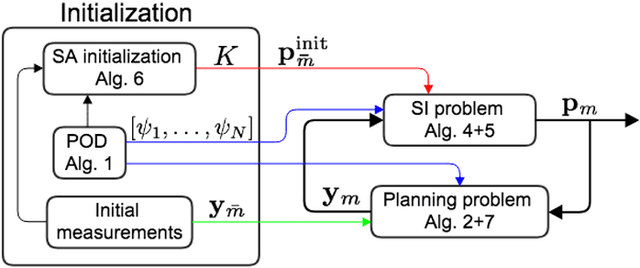
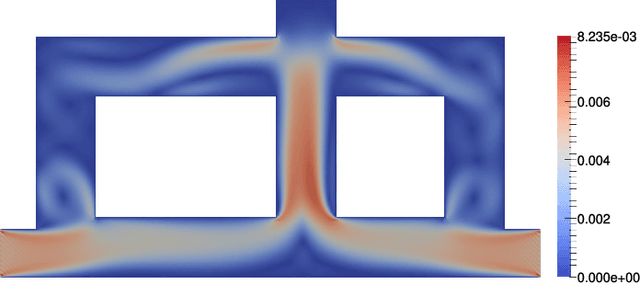
We consider the problem of Active Source Identification (ASI) in steady-state Advection-Diffusion (AD) transport systems. Unlike existing bio-inspired heuristic methods, we propose a model-based method that employs the AD-PDE to capture the transport phenomenon. Specifically, we formulate the Source Identification (SI) problem as a PDE-constrained optimization problem in function spaces. To obtain a tractable solution, we reduce the dimension of the concentration field using Proper Orthogonal Decomposition and approximate the unknown source field using nonlinear basis functions, drastically decreasing the number of unknowns. Moreover, to collect the concentration measurements, we control a robot sensor through a sequence of waypoints that maximize the smallest eigenvalue of the Fisher Information matrix of the unknown source parameters. Specifically, after every new measurement, a SI problem is solved to obtain a source estimate that is used to determine the next waypoint. We show that our algorithm can efficiently identify sources in complex AD systems and non-convex domains, in simulation and experimentally. This is the first time that PDEs are used for robotic SI in practice.
Distributed State Estimation Using Intermittently Connected Robot Networks
Sep 19, 2018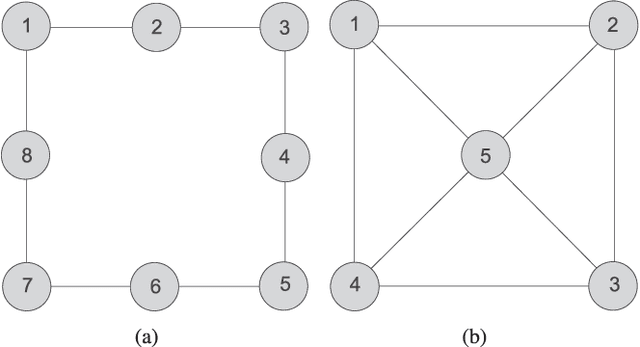
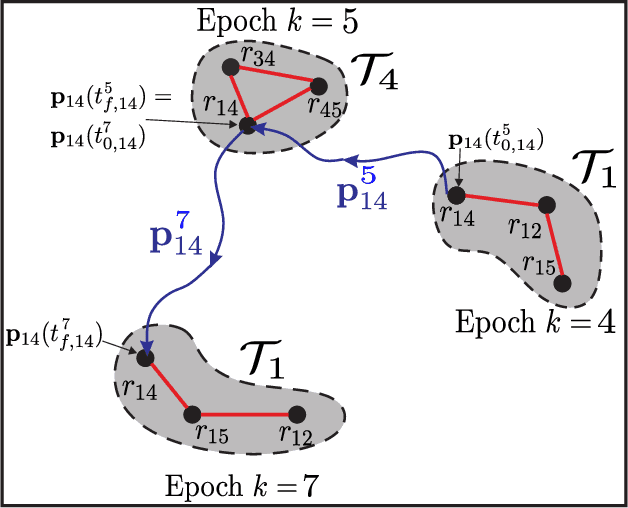
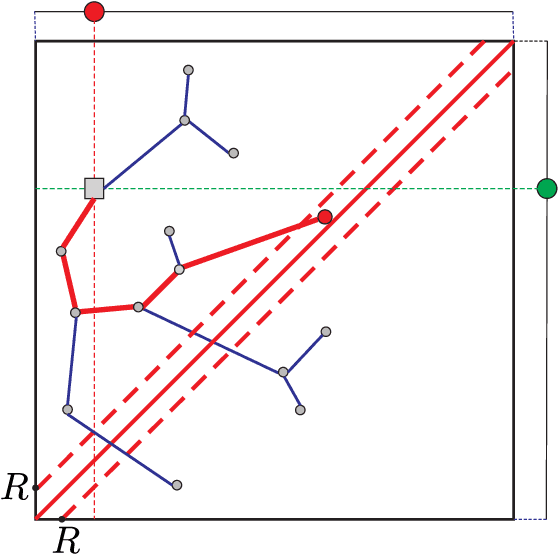
This paper considers the problem of distributed state estimation using multi-robot systems. The robots have limited communication capabilities and, therefore, communicate their measurements intermittently only when they are physically close to each other. To decrease the distance that the robots need to travel only to communicate, we divide them into small teams that can communicate at different locations to share information and update their beliefs. Then, we propose a new distributed scheme that combines (i) communication schedules that ensure that the network is intermittently connected, and (ii) sampling-based motion planning for the robots in every team with the objective to collect optimal measurements and decide a location for those robots to communicate. To the best of our knowledge, this is the first distributed state estimation framework that relaxes all network connectivity assumptions, and controls intermittent communication events so that the estimation uncertainty is minimized. We present simulation results that demonstrate significant improvement in estimation accuracy compared to methods that maintain an end-to-end connected network for all time.