 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe ISTI Rapid Response on Exploring Cloud Computing 2018
Jan 04, 2019
This report describes eighteen projects that explored how commercial cloud computing services can be utilized for scientific computation at national laboratories. These demonstrations ranged from deploying proprietary software in a cloud environment to leveraging established cloud-based analytics workflows for processing scientific datasets. By and large, the projects were successful and collectively they suggest that cloud computing can be a valuable computational resource for scientific computation at national laboratories.
Faster and better: a machine learning approach to corner detection
Oct 14, 2008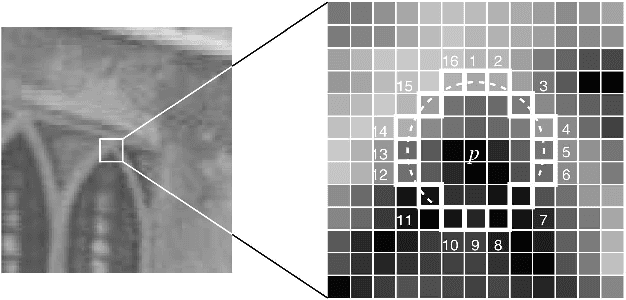
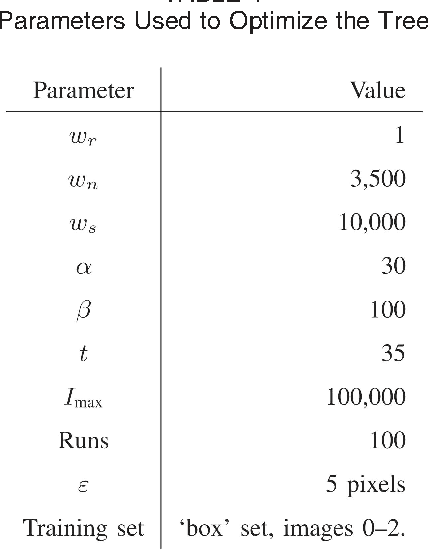
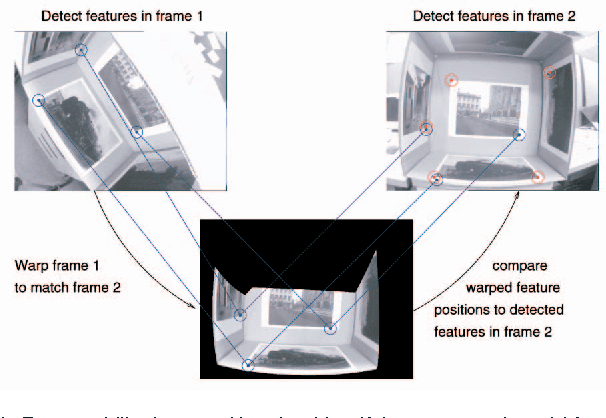
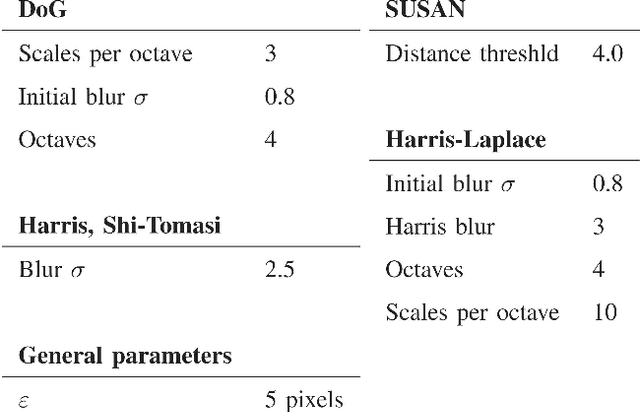
The repeatability and efficiency of a corner detector determines how likely it is to be useful in a real-world application. The repeatability is importand because the same scene viewed from different positions should yield features which correspond to the same real-world 3D locations [Schmid et al 2000]. The efficiency is important because this determines whether the detector combined with further processing can operate at frame rate. Three advances are described in this paper. First, we present a new heuristic for feature detection, and using machine learning we derive a feature detector from this which can fully process live PAL video using less than 5% of the available processing time. By comparison, most other detectors cannot even operate at frame rate (Harris detector 115%, SIFT 195%). Second, we generalize the detector, allowing it to be optimized for repeatability, with little loss of efficiency. Third, we carry out a rigorous comparison of corner detectors based on the above repeatability criterion applied to 3D scenes. We show that despite being principally constructed for speed, on these stringent tests, our heuristic detector significantly outperforms existing feature detectors. Finally, the comparison demonstrates that using machine learning produces significant improvements in repeatability, yielding a detector that is both very fast and very high quality.
* 35 pages, 11 figures