 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven worker activity recognition and picking efficiency estimation in manual strawberry harvesting
Mar 28, 2025



Manual fruit harvesting is common in agriculture, but the amount of time that pickers spend on nonproductive activities can make it very inefficient. Accurately identifying picking vs. non-picking activity is crucial for estimating picker efficiency and optimizing labor management and the harvest process. In this study, a practical system was developed to calculate the efficiency of pickers in commercial strawberry harvesting. Instrumented picking carts were used to record in real-time the harvested fruit weight, geo-location, and cart movement. A fleet of these carts was deployed during the commercial strawberry harvest season in Santa Maria, CA. The collected data was then used to train a CNN-LSTM-based deep neural network to classify a picker's activity into ``Pick" and ``NoPick" classes. Experimental evaluations showed that the CNN-LSTM model showed promising activity recognition performance with an F1 score accuracy of up to 0.974. The classification results were then used to compute two worker efficiency metrics: the percentage of time spent actively picking, and the time required to fill a tray. Analysis of the season-long harvest data showed that the pickers spent an average of 73.56% of their total harvest time actively picking strawberries, with an average tray fill time of 6.22 minutes. The mean accuracies of these metrics were 96.29% and 95.42%, respectively. When integrated on a commercial scale, the proposed technology could aid growers in automated worker activity monitoring and harvest optimization, ultimately helping to reduce non-productive time and enhance overall harvest efficiency.
A strawberry harvest-aiding system with crop-transport co-robots: Design, development, and field evaluation
Jul 27, 2021

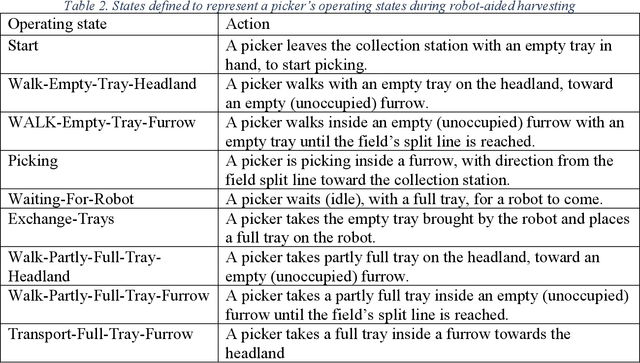
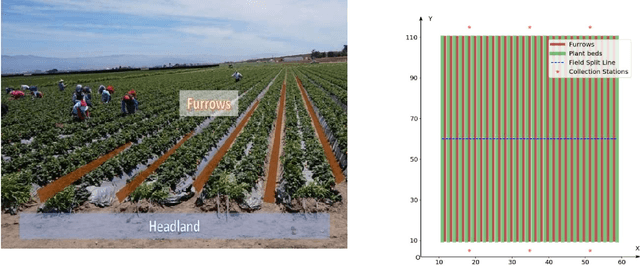
Mechanizing the manual harvesting of fresh market fruits constitutes one of the biggest challenges to the sustainability of the fruit industry. During manual harvesting of some fresh-market crops like strawberries and table grapes, pickers spend significant amounts of time walking to carry full trays to a collection station at the edge of the field. A step toward increasing harvest automation for such crops is to deploy harvest-aid collaborative robots (co-bots) that transport the empty and full trays, thus increasing harvest efficiency by reducing pickers' non-productive walking times. This work presents the development of a co-robotic harvest-aid system and its evaluation during commercial strawberry harvesting. At the heart of the system lies a predictive stochastic scheduling algorithm that minimizes the expected non-picking time, thus maximizing the harvest efficiency. During the evaluation experiments, the co-robots improved the mean harvesting efficiency by around 10% and reduced the mean non-productive time by 60%, when the robot-to-picker ratio was 1:3. The concepts developed in this work can be applied to robotic harvest-aids for other manually harvested crops that involve walking for crop transportation.