 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSampling-Based Follow-the-Leader Motion Planning for Manipulator-Mounted Continuum Robots
May 12, 2026Follow-the-leader (FTL) motion exploits the unique morphology of continuum robots (CRs) to navigate confined spaces by having the body retrace the path of the tip. While extensively studied, existing FTL methods typically assume a fixed base or a single degree-of-freedom insertion mechanism, limiting their applicability to practical systems in which CRs are mounted on robotic manipulators with fully actuated SE(3) base pose. This paper presents a sampling-based motion planner for FTL motion of manipulator-mounted CRs that jointly considers robot configuration and base pose. The key idea is to decouple global shape search from base pose determination by computing the base pose through a closed-form geometric construction, thereby avoiding iterative optimization during online planning. The approach supports general forward models and enables efficient planning by shifting the majority of computation offline. We establish theoretical guarantees including resolution complete shape search and converging tip tracking throughout waypoint traversal and interpolation. Experiments on 120 simulated paths over 3 test classes demonstrate 0% tip error and 1.9% mean shape deviation (w.r.t. robot length) at 100% success rate. We validate the practicality of our approach on a 6-DOF tendon-driven CR mounted on a serial manipulator. Code and visualization available at https://continuumroboticslab.github.io/sb-ftl-cr-planner/.
A Dynamic Model Identification Package for the da Vinci Research Kit
Mar 11, 2019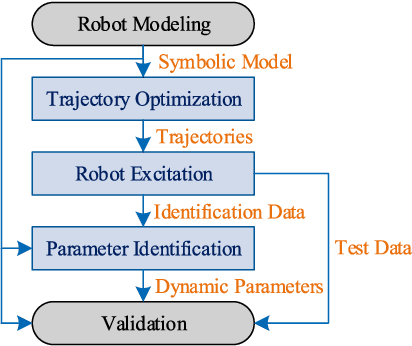
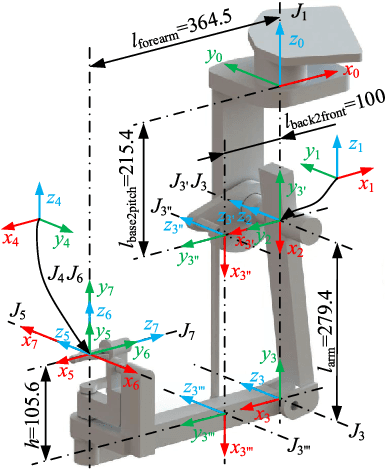
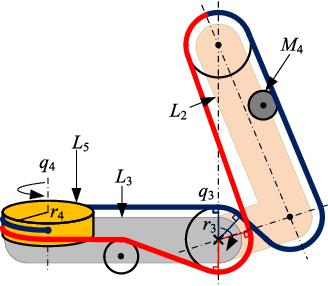
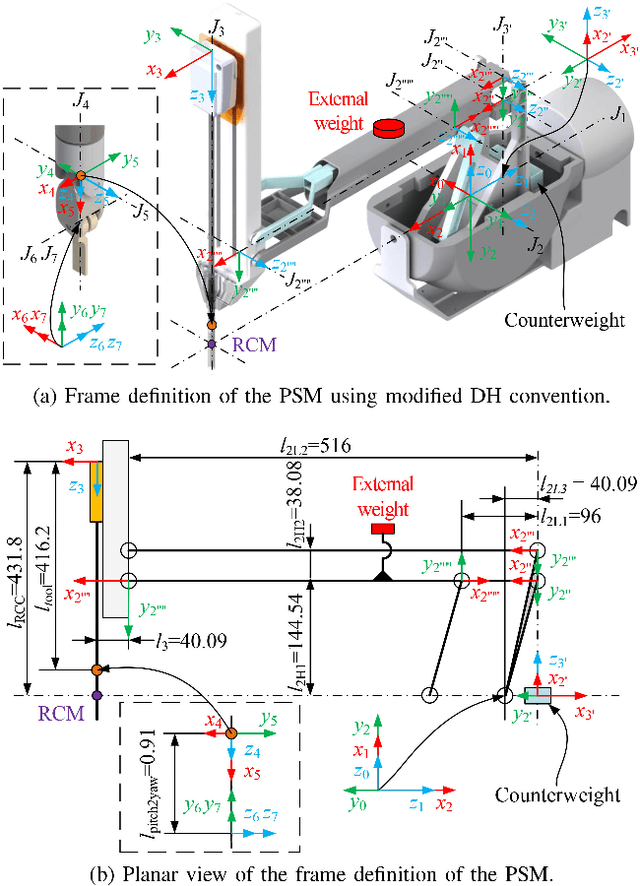
The da Vinci Research Kit (dVRK) is a teleoperated surgical robotic system. For dynamic simulations and modelbased control, the dynamic model of the dVRK with standard dynamic parameters is required. We developed a dynamic model identification package for the dVRK, capable of modeling the parallelograms, springs, counterweight, and tendon couplings, which are inherent to the dVRK. A convex optimization-based method is used to identify the standard dynamic parameters of the dVRK subject to physically feasible constraints. The relative errors between the predicted and measured motor torque are calculated on independent test trajectories, which are less than 16.3% and 18.9% for the first three joints and 34.0% and 26.5% for all joints for the master tool manipulator and patient side manipulator, respectively. We open source the identification software package. Although this software package is originally developed for the dVRK, it is easy to apply it on other robots with similar characteristics to the dVRK through simple configuration.
Building Robust Deep Neural Networks for Road Sign Detection
Dec 26, 2017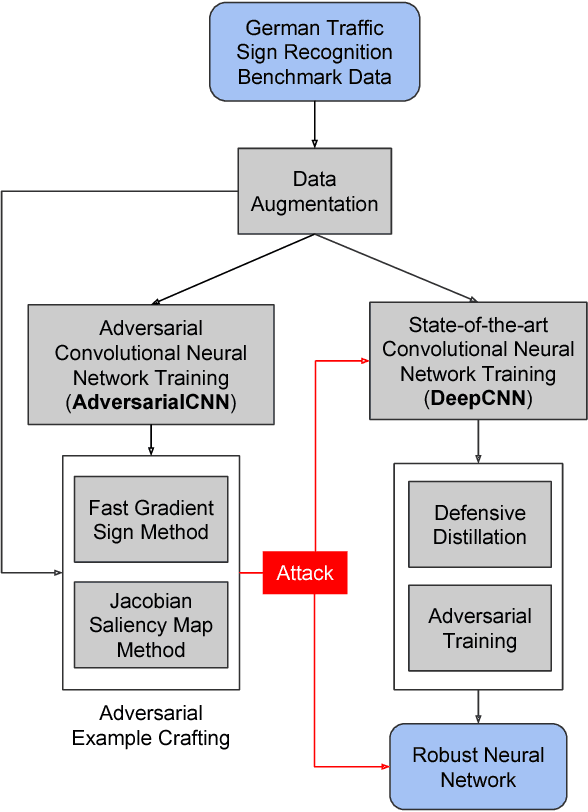
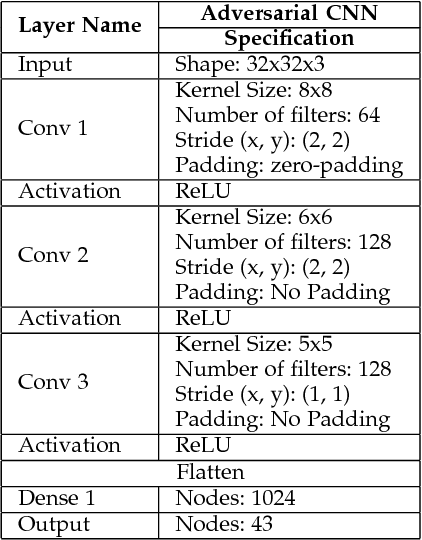
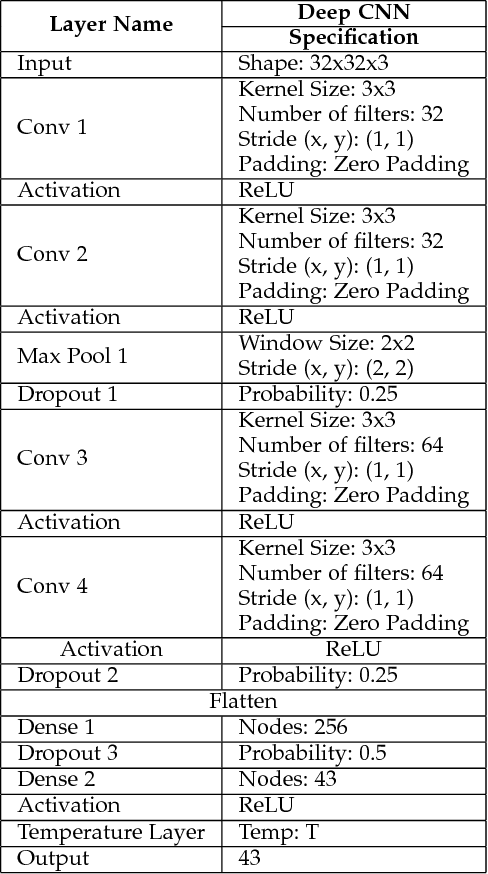
Deep Neural Networks are built to generalize outside of training set in mind by using techniques such as regularization, early stopping and dropout. But considerations to make them more resilient to adversarial examples are rarely taken. As deep neural networks become more prevalent in mission-critical and real-time systems, miscreants start to attack them by intentionally making deep neural networks to misclassify an object of one type to be seen as another type. This can be catastrophic in some scenarios where the classification of a deep neural network can lead to a fatal decision by a machine. In this work, we used GTSRB dataset to craft adversarial samples by Fast Gradient Sign Method and Jacobian Saliency Method, used those crafted adversarial samples to attack another Deep Convolutional Neural Network and built the attacked network to be more resilient against adversarial attacks by making it more robust by Defensive Distillation and Adversarial Training