 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Assisted NLOS Sensing for RIS-Based Indoor Localization in Smart Factories
May 21, 2025In the era of Industry 4.0, precise indoor localization is vital for automation and efficiency in smart factories. Reconfigurable Intelligent Surfaces (RIS) are emerging as key enablers in 6G networks for joint sensing and communication. However, RIS faces significant challenges in Non-Line-of-Sight (NLOS) and multipath propagation, particularly in localization scenarios, where detecting NLOS conditions is crucial for ensuring not only reliable results and increased connectivity but also the safety of smart factory personnel. This study introduces an AI-assisted framework employing a Convolutional Neural Network (CNN) customized for accurate Line-of-Sight (LOS) and Non-Line-of-Sight (NLOS) classification to enhance RIS-based localization using measured, synthetic, mixed-measured, and mixed-synthetic experimental data, that is, original, augmented, slightly noisy, and highly noisy data, respectively. Validated through such data from three different environments, the proposed customized-CNN (cCNN) model achieves {95.0\%-99.0\%} accuracy, outperforming standard pre-trained models like Visual Geometry Group 16 (VGG-16) with an accuracy of {85.5\%-88.0\%}. By addressing RIS limitations in NLOS scenarios, this framework offers scalable and high-precision localization solutions for 6G-enabled smart factories.
Computer Vision-Aided Reconfigurable Intelligent Surface-Based Beam Tracking: Prototyping and Experimental Results
Jul 11, 2022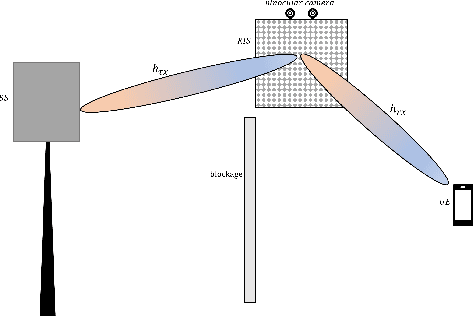
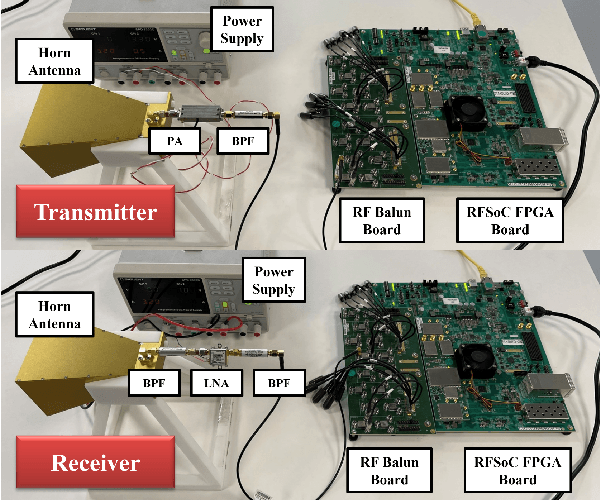
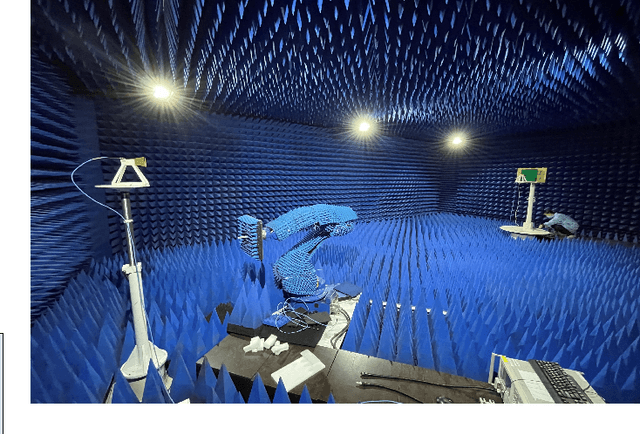
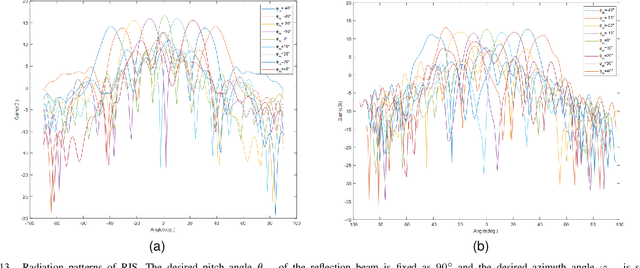
In this paper, we propose a novel computer vision-based approach to aid Reconfigurable Intelligent Surface (RIS) for dynamic beam tracking and then implement the corresponding prototype verification system. A camera is attached at the RIS to obtain the visual information about the surrounding environment, with which RIS identifies the desired reflected beam direction and then adjusts the reflection coefficients according to the pre-designed codebook. Compared to the conventional approaches that utilize channel estimation or beam sweeping to obtain the reflection coefficients, the proposed one not only saves beam training overhead but also eliminates the requirement for extra feedback links. We build a 20-by-20 RIS running at 5.4 GHz and develop a high-speed control board to ensure the real-time refresh of the reflection coefficients. Meanwhile we implement an independent peer-to-peer communication system to simulate the communication between the base station and the user equipment. The vision-aided RIS prototype system is tested in two mobile scenarios: RIS works in near-field conditions as a passive array antenna of the base station; RIS works in far-field conditions to assist the communication between the base station and the user equipment. The experimental results show that RIS can quickly adjust the reflection coefficients for dynamic beam tracking with the help of visual information.