 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDefinition and Quantification of Shock/Impact/Transient Vibrations
Nov 16, 2022Vibration injury in the hand-arm system from hand-held machines is one of the most common occupational health injuries and causes severe and often chronic nerve and vascular injury to the operator. Machines emitting shock vibrations, e.g., impact wrenches have since long been identified as a special risk factor. In legislative and standard texts the terms shock, impact, and transient vibration are frequently used to underline the special risk associated with these kinds of vibrations. In spite of this, there is no mathematically stringent definition what a shock vibration is or how the amplitude of the shock is defined. This lack of definitions is the subject of this article. This document discusses a number of candidate definitions for a vibration shock index (VSI) that quantifies different vibration signals in terms of how localized they are in the time domain. The VSI is intended to be used to classify and compare different vibration sources. The VSI is independent of the vibration level, i.e., it is unchanged if the vibration signal is rescaled. The traditional root mean square method to determine the vibration level will not produce a value representative for the shocks occurring in a signal with high VSI. Thus, there is a need for a complementing quantification method for the localized signal parts. Possible definitions for such a vibration shock level (VSL) are suggested. A problem formulation is first stated together with a description of the approach used for designing the VSI and the VSL. After this, model signals are defined, which are used to discuss and evaluate the different candidate definitions. Then, a number of candidate definitions are discussed, leading up to a conclusion on which candidate definitions that are promising for experimental evaluation.
MmWave 6D Radio Localization with a Snapshot Observation from a Single BS
Apr 11, 2022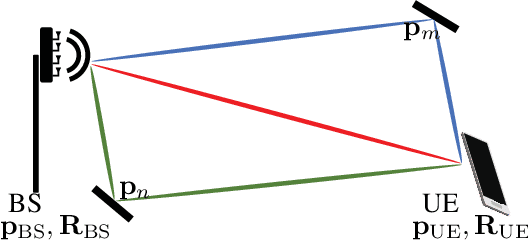
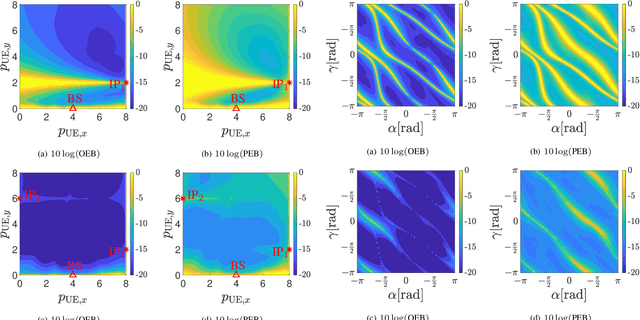
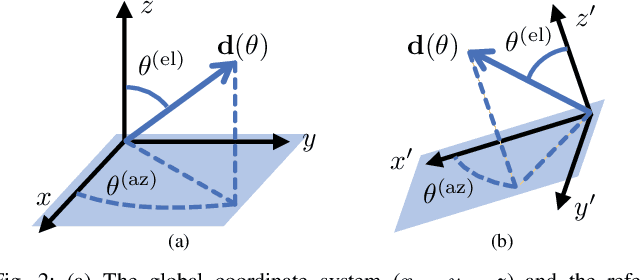
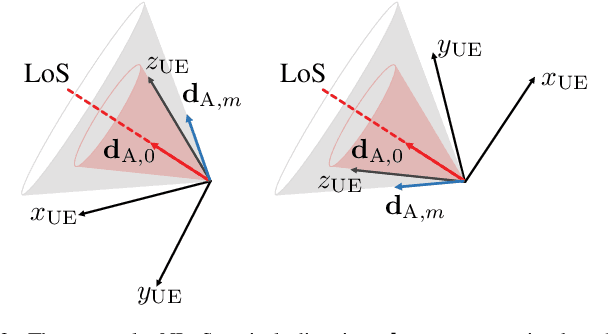
Accurate and ubiquitous localization is crucial for a variety of applications such as logistics, navigation, intelligent transport, monitoring, and control. Exploiting mmWave signals in 5G and Beyond 5G systems can provide accurate localization with limited infrastructure. We consider the single base station localization problem and extend it to 3D position and 3D orientation estimation of an unsynchronized multi-antenna user, using downlink MIMO-OFDM signals. Through a Fisher information analysis, we show that the problem is often identifiable, provided that there is at least one additional multipath component, even if the position of corresponding incidence point is a priori unknown. Subsequently, we pose a maximum likelihood (ML) estimation problem, to jointly estimate the 3D position and 3D orientation of the user as well as several nuisance parameters (the user clock offset and the positions of incidence points corresponding to the multipath). The ML problem is a high-dimensional non-convex optimization problem over a product of Euclidean and Riemannian manifolds. To avoid complex exhaustive search procedures, we propose a geometric initial estimate of all parameters, which reduces the problem to a 1-dimensional search over a finite interval. Numerical results show the efficiency of the proposed ad-hoc estimation, whose gap to the CRB is tightened using ML estimation.
3D Orientation Estimation with Multiple 5G mmWave Base Stations
Jan 05, 2021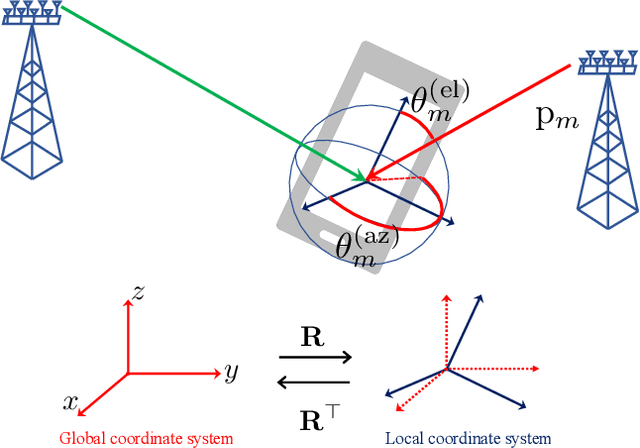
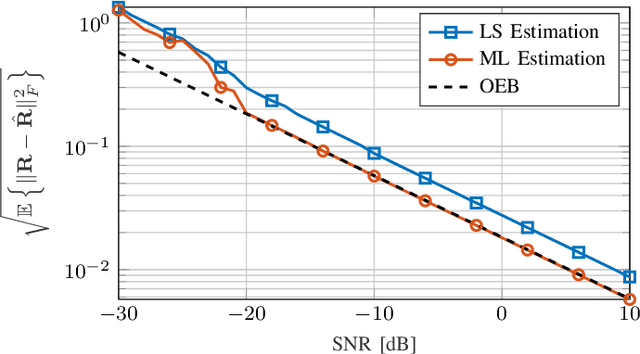
We consider the problem of estimating the 3D orientation of a user, using the downlink mmWave signals received from multiple base stations. We show that the received signals from several base stations, having known positions, can be used to estimate the unknown orientation of the user. We formulate the estimation problem as a maximum likelihood estimation problem in the the manifold of rotation matrices. In order to provide an initial estimate to solve the non-linear non-convex optimization problem, we resort to a least squares estimation problem that exploits the underlying geometry. Our numerical results show that the problem of orientation estimation can be solved when the signals from at least two base stations are received. We also provide the orientation lower error bound, showing a narrow gap between the performance of the proposed estimators and the bound.