 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeach and Repeat Navigation: A Robust Control Approach
Sep 27, 2023



Robot navigation requires an autonomy pipeline that is robust to environmental changes and effective in varying conditions. Teach and Repeat (T&R) navigation has shown high performance in autonomous repeated tasks under challenging circumstances, but research within T&R has predominantly focused on motion planning as opposed to motion control. In this paper, we propose a novel T&R system based on a robust motion control technique for a skid-steering mobile robot using sliding-mode control that effectively handles uncertainties that are particularly pronounced in the T&R task, where sensor noises, parametric uncertainties, and wheel-terrain interaction are common challenges. We first theoretically demonstrate that the proposed T&R system is globally stable and robust while considering the uncertainties of the closed-loop system. When deployed on a Clearpath Jackal robot, we then show the global stability of the proposed system in both indoor and outdoor environments covering different terrains, outperforming previous state-of-the-art methods in terms of mean average trajectory error and stability in these challenging environments. This paper makes an important step towards long-term autonomous T&R navigation with ensured safety guarantees.
Trajectory Tracking Control of Skid-Steering Mobile Robots with Slip and Skid Compensation using Sliding-Mode Control and Deep Learning
Sep 16, 2023Slip and skid compensation is crucial for mobile robots' navigation in outdoor environments and uneven terrains. In addition to the general slipping and skidding hazards for mobile robots in outdoor environments, slip and skid cause uncertainty for the trajectory tracking system and put the validity of stability analysis at risk. Despite research in this field, having a real-world feasible online slip and skid compensation is still challenging due to the complexity of wheel-terrain interaction in outdoor environments. This paper presents a novel trajectory tracking technique with real-world feasible online slip and skid compensation at the vehicle-level for skid-steering mobile robots in outdoor environments. The sliding mode control technique is utilized to design a robust trajectory tracking system to be able to consider the parameter uncertainty of this type of robot. Two previously developed deep learning models [1], [2] are integrated into the control feedback loop to estimate the robot's slipping and undesired skidding and feed the compensator in a real-time manner. The main advantages of the proposed technique are (1) considering two slip-related parameters rather than the conventional three slip parameters at the wheel-level, and (2) having an online real-world feasible slip and skid compensator to be able to reduce the tracking errors in unforeseen environments. The experimental results show that the proposed controller with the slip and skid compensator improves the performance of the trajectory tracking system by more than 27%.
Design and Implementation of a Fuzzy Adaptive Controller for Time-Varying Formation Leader-Follower Configuration of Nonholonomic Mobile Robots
May 23, 2022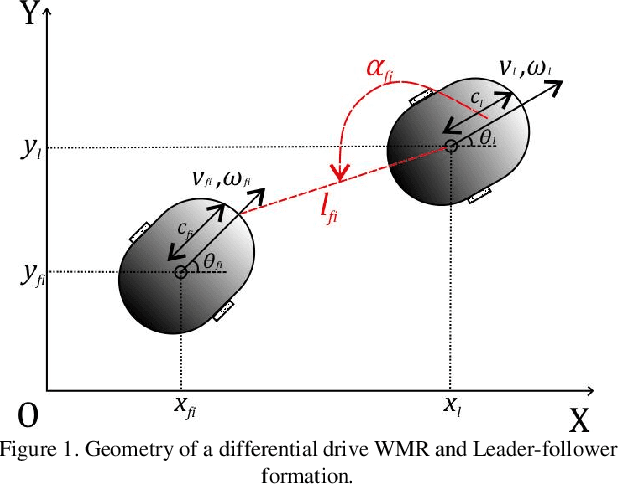
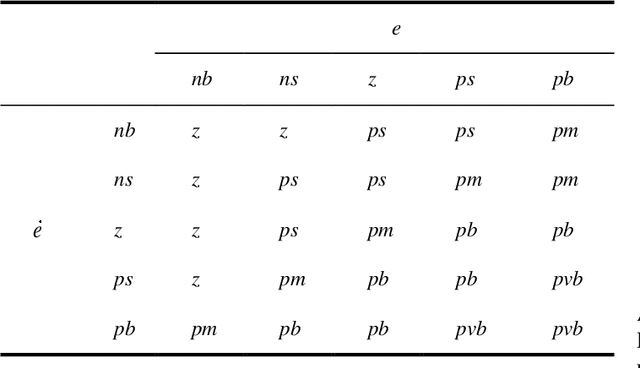
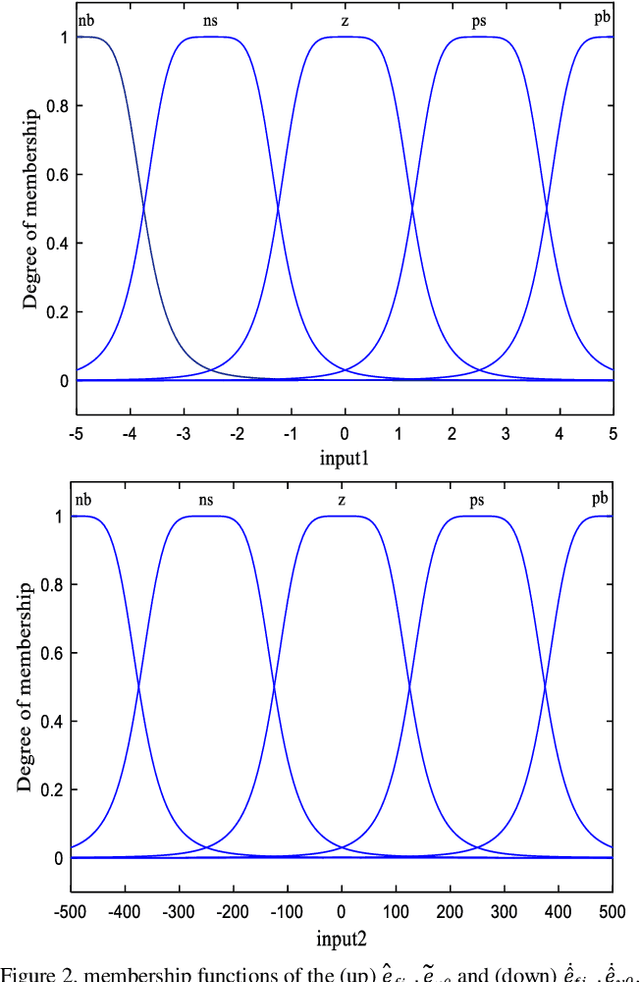
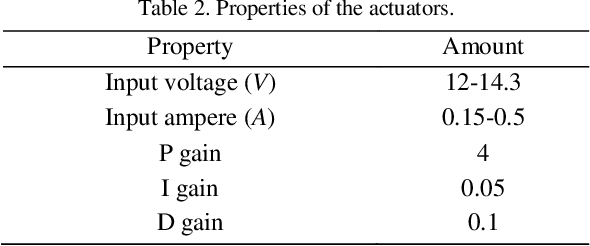
In this paper, a time-varying leader-follower formation control of nonholonomic mobile robots based on a trajectory tracking control strategy is considered. In the time-varying formation, the relative bearing and distance of each follower are variable parameters, and therefore, the followers can carry out various and complex behaviour even without changing the linear and angular velocities of the leader robot. After proposing the kinematic model of the time-varying leader-follower formation, the backstepping control method is exploited to keep the structure of the defined formation. The global stability of the formation is investigated using the Lyapunov theorem. Moreover, the designed nonlinear controller suffers from the ineffectual large input commands at the beginning of the formation. To rectify this problem, a fuzzy adaptive algorithm is proposed to improve the backstepping controller and the global stability of the resulting fuzzy adaptive backstepping controller is guaranteed. Considering the rate change of relative distance and bearing in the kinematic model of the leader-follower formation and controller design procedure, makes the formation more practical in dynamic and clutter environments, as well as capable of defining complicated behaviour for followers, and provides crash and obstacle avoidance without switching between different control strategies. Finally, the performance of the proposed kinematics model and designed controllers are investigated through simulations and experimental studies.