 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAggregating swarms through morphology handling design contingencies: from the sweet spot to a rich expressivity
Jan 12, 2026Morphological computing, the use of the physical design of a robot to ease the realization of a given task has been proven to be a relevant concept in the context of swarm robotics. Here we demonstrate both experimentally and numerically, that the success of such a strategy may heavily rely on the type of policy adopted by the robots, as well as on the details of the physical design. To do so, we consider a swarm of robots, composed of Kilobots embedded in an exoskeleton, the design of which controls the propensity of the robots to align or anti-align with the direction of the external force they experience. We find experimentally that the contrast that was observed between the two morphologies in the success rate of a simple phototactic task, where the robots were programmed to stop when entering a light region, becomes dramatic, if the robots are not allowed to stop, and can only slow down. Building on a faithful physical model of the self-aligning dynamics of the robots, we perform numerical simulations and demonstrate on one hand that a precise tuning of the self-aligning strength around a sweet spot is required to achieve an efficient phototactic behavior, on the other hand that exploring a range of self-alignment strength allows for a rich expressivity of collective behaviors.
Pobogot -- An Open-Hardware Open-Source Low Cost Robot for Swarm Robotics
Apr 11, 2025This paper describes the Pogobot, an open-source and open-hardware platform specifically designed for research involving swarm robotics. Pogobot features vibration-based locomotion, infrared communication, and an array of sensors in a cost-effective package (approx. 250~euros/unit). The platform's modular design, comprehensive API, and extensible architecture facilitate the implementation of swarm intelligence algorithms and distributed online reinforcement learning algorithms. Pogobots offer an accessible alternative to existing platforms while providing advanced capabilities including directional communication between units. More than 200 Pogobots are already being used on a daily basis at Sorbonne Universit\'e and PSL to study self-organizing systems, programmable active matter, discrete reaction-diffusion-advection systems as well as models of social learning and evolution.
Attractive vs. truncated repulsive supercooled liquids : dynamics is encoded in the pair correlation function
Jun 03, 2019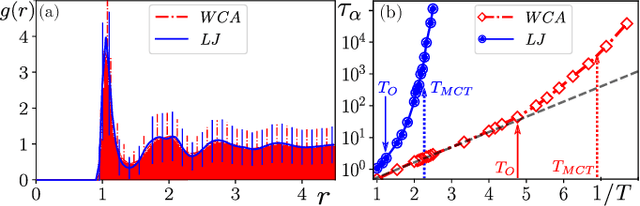
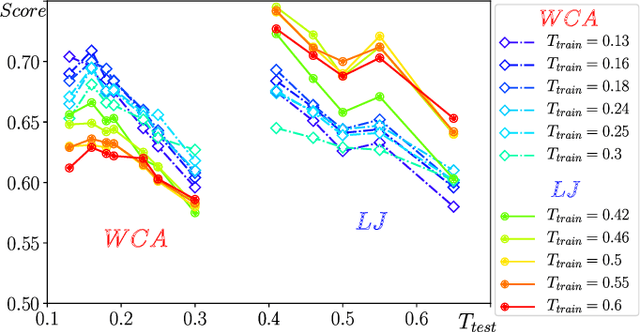
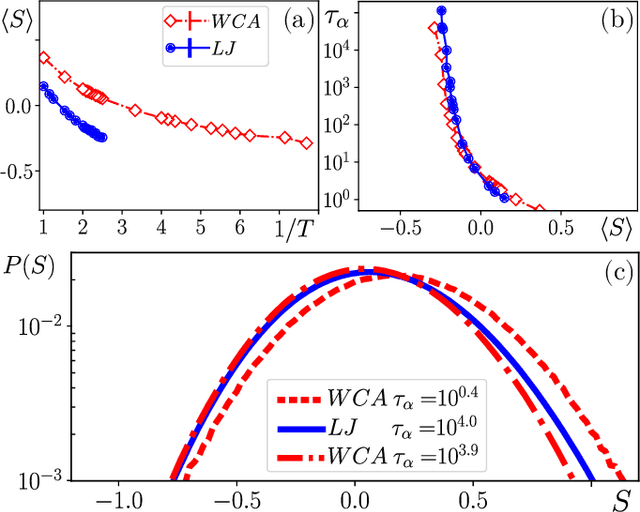
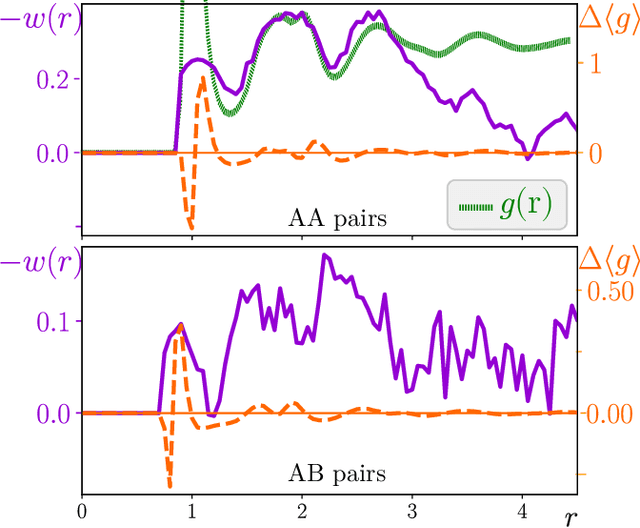
We compare glassy dynamics in two liquids that differ in the form of their interaction potentials. Both systems have the same repulsive interactions but one has also an attractive part in the potential. These two systems exhibit very different dynamics despite having nearly identical pair correlation functions. We demonstrate that a properly weighted integral of the pair correlation function, which amplifies the subtle differences between the two systems, correctly captures their dynamical differences. The weights are obtained from a standard machine learning algorithm.