 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCongestion Reduction in EV Charger Placement Using Traffic Equilibrium Models
Dec 12, 2025



Growing EV adoption can worsen traffic conditions if chargers are sited without regard to their impact on congestion. We study how to strategically place EV chargers to reduce congestion using two equilibrium models: one based on congestion games and one based on an atomic queueing simulation. We apply both models within a scalable greedy station-placement algorithm. Experiments show that this greedy scheme yields optimal or near-optimal congestion outcomes in realistic networks, even though global optimality is not guaranteed as we show with a counterexample. We also show that the queueing-based approach yields more realistic results than the congestion-game model, and we present a unified methodology that calibrates congestion delays from queue simulation and solves equilibrium in link-space.
Memoryless Control Design for Persistent Surveillance under Safety Constraints
Nov 08, 2012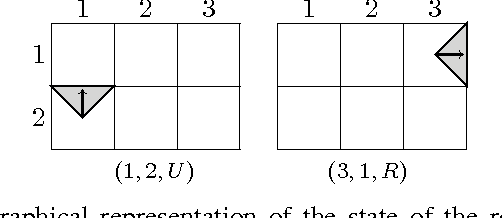
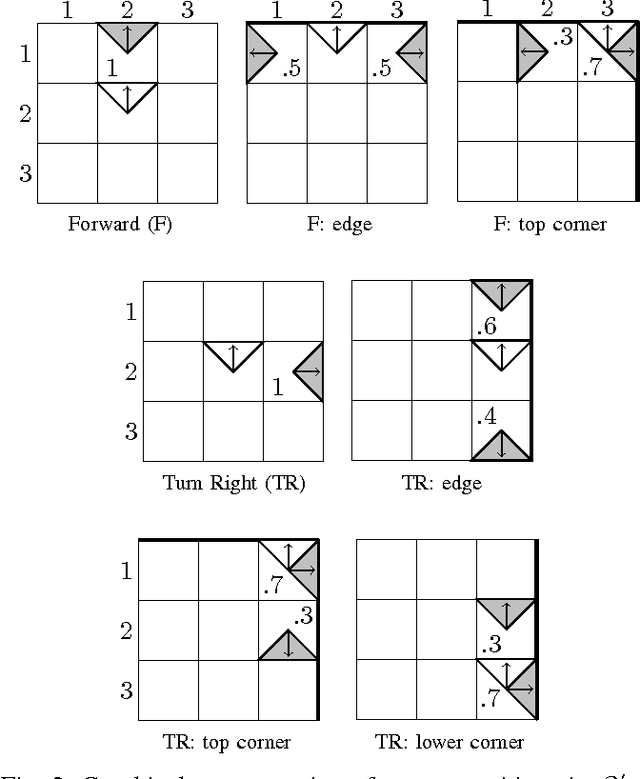
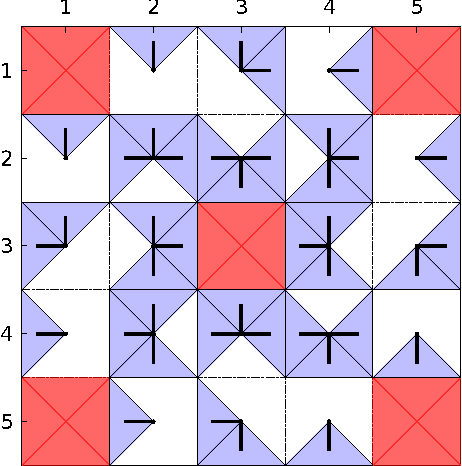
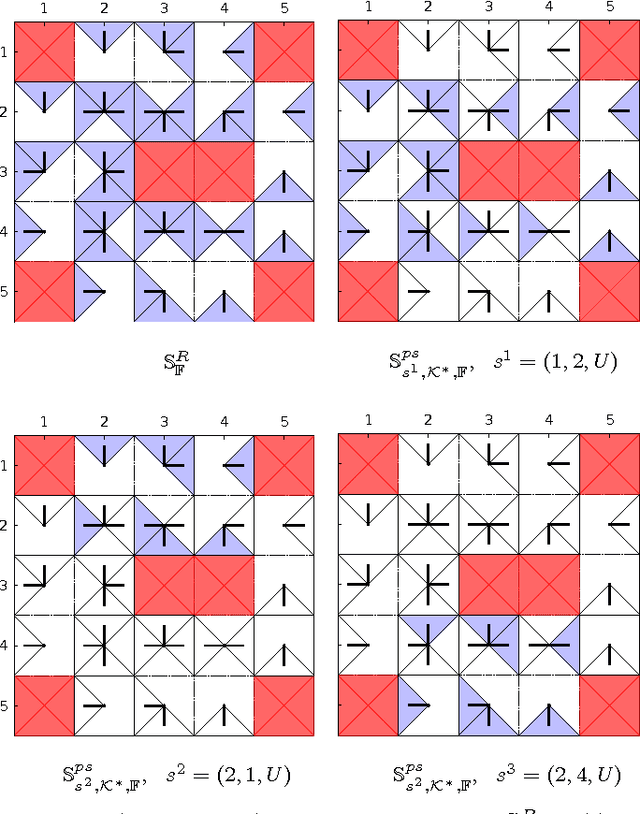
This paper deals with the design of time-invariant memoryless control policies for robots that move in a finite two- dimensional lattice and are tasked with persistent surveillance of an area in which there are forbidden regions. We model each robot as a controlled Markov chain whose state comprises its position in the lattice and the direction of motion. The goal is to find the minimum number of robots and an associated time-invariant memoryless control policy that guarantees that the largest number of states are persistently surveilled without ever visiting a forbidden state. We propose a design method that relies on a finitely parametrized convex program inspired by entropy maximization principles. Numerical examples are provided.