 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Framework for Robot Lawnmower Coverage Path Planning using Cellular Decomposition
Jun 06, 2025Efficient Coverage Path Planning (CPP) is necessary for autonomous robotic lawnmowers to effectively navigate and maintain lawns with diverse and irregular shapes. This paper introduces a comprehensive end-to-end pipeline for CPP, designed to convert user-defined boundaries on an aerial map into optimized coverage paths seamlessly. The pipeline includes user input extraction, coordinate transformation, area decomposition and path generation using our novel AdaptiveDecompositionCPP algorithm, preview and customization through an interactive coverage path visualizer, and conversion to actionable GPS waypoints. The AdaptiveDecompositionCPP algorithm combines cellular decomposition with an adaptive merging strategy to reduce non-mowing travel thereby enhancing operational efficiency. Experimental evaluations, encompassing both simulations and real-world lawnmower tests, demonstrate the effectiveness of the framework in coverage completeness and mowing efficiency.
Transformer Based Reinforcement Learning For Games
Dec 09, 2019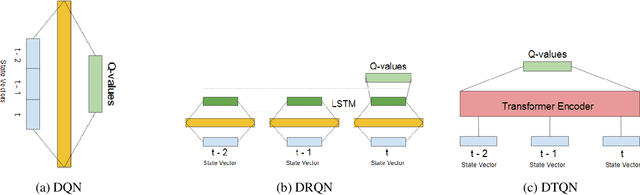
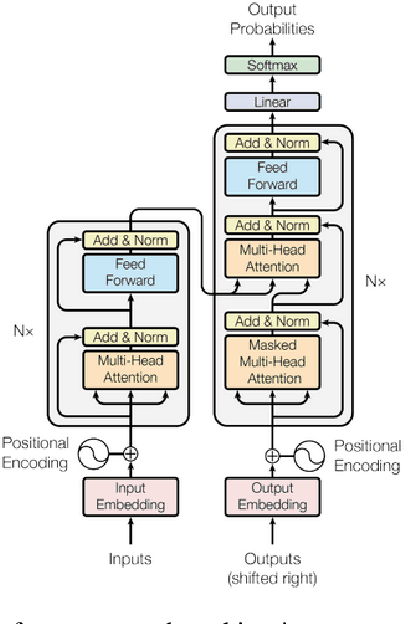
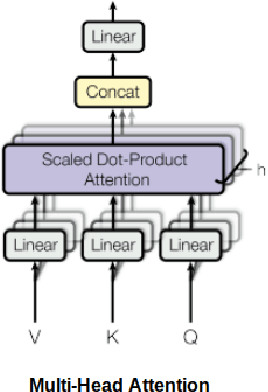
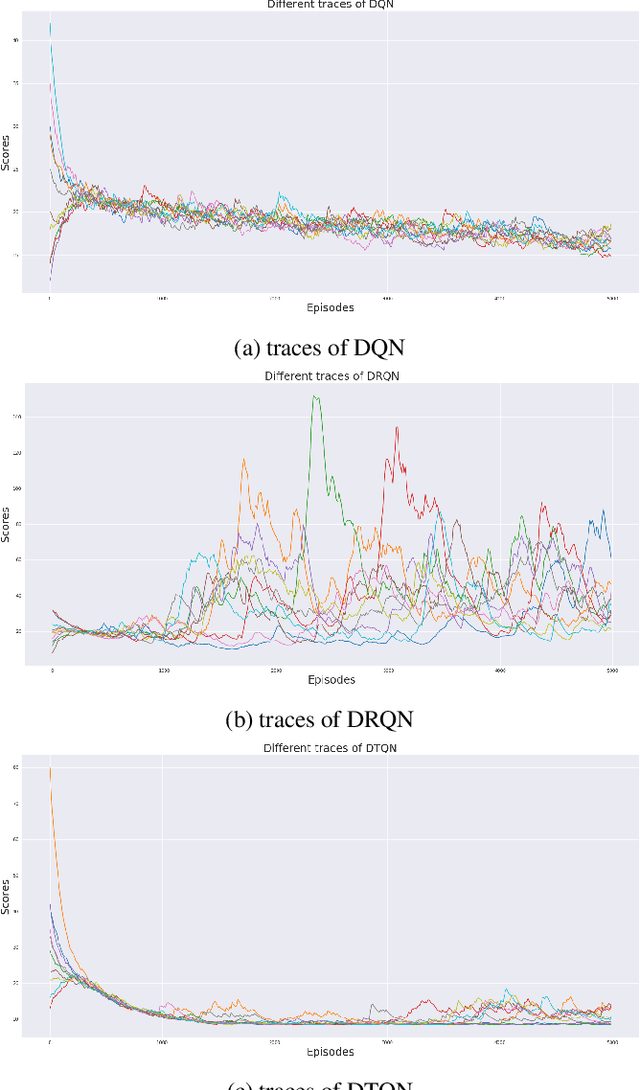
Recent times have witnessed sharp improvements in reinforcement learning tasks using deep reinforcement learning techniques like Deep Q Networks, Policy Gradients, Actor Critic methods which are based on deep learning based models and back-propagation of gradients to train such models. An active area of research in reinforcement learning is about training agents to play complex video games, which so far has been something accomplished only by human intelligence. Some state of the art performances in video game playing using deep reinforcement learning are obtained by processing the sequence of frames from video games, passing them through a convolutional network to obtain features and then using recurrent neural networks to figure out the action leading to optimal rewards. The recurrent neural network will learn to extract the meaningful signal out of the sequence of such features. In this work, we propose a method utilizing a transformer network which have recently replaced RNNs in Natural Language Processing (NLP), and perform experiments to compare with existing methods.