 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNatural Riemannian gradient for learning functional tensor networks
Apr 10, 2026We consider machine learning tasks with low-rank functional tree tensor networks (TTN) as the learning model. While in the case of least-squares regression, low-rank functional TTNs can be efficiently optimized using alternating optimization, this is not directly possible in other problems, such as multinomial logistic regression. We propose a natural Riemannian gradient descent type approach applicable to arbitrary losses which is based on the natural gradient by Amari. In particular, the search direction obtained by the natural gradient is independent of the choice of basis of the underlying functional tensor product space. Our framework applies to both the factorized and manifold-based approach for representing the functional TTN. For practical application, we propose a hierarchy of efficient approximations to the true natural Riemannian gradient for computing the updates in the parameter space. Numerical experiments confirm our theoretical findings on common classification datasets and show that using natural Riemannian gradient descent for learning considerably improves convergence behavior when compared to standard Riemannian gradient methods.
Error Bounds of Projection Models in Weakly Supervised 3D Human Pose Estimation
Oct 23, 2020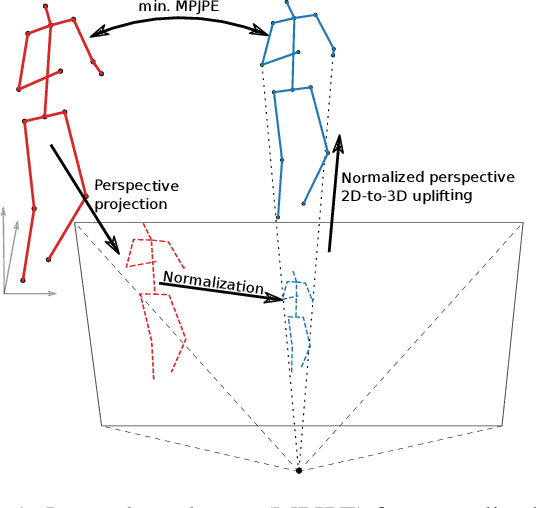
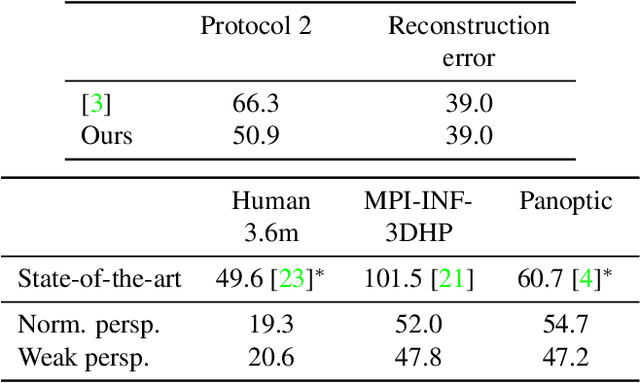
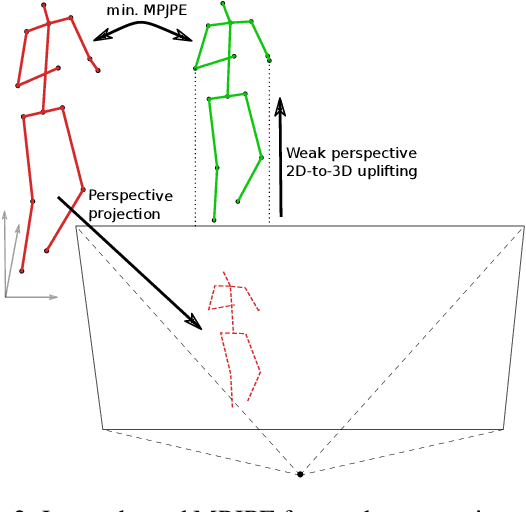
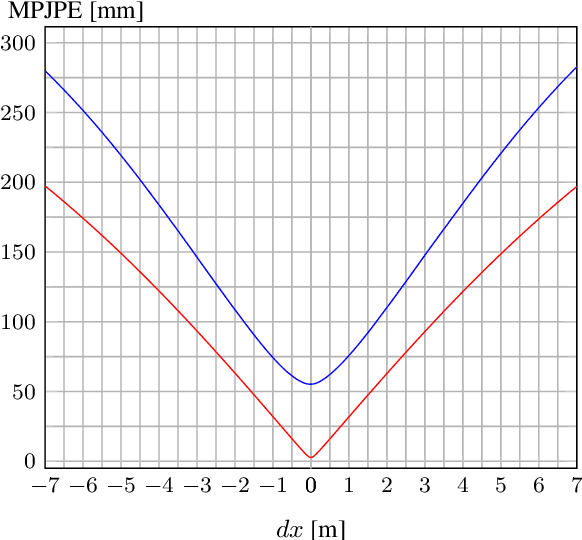
The current state-of-the-art in monocular 3D human pose estimation is heavily influenced by weakly supervised methods. These allow 2D labels to be used to learn effective 3D human pose recovery either directly from images or via 2D-to-3D pose uplifting. In this paper we present a detailed analysis of the most commonly used simplified projection models, which relate the estimated 3D pose representation to 2D labels: normalized perspective and weak perspective projections. Specifically, we derive theoretical lower bound errors for those projection models under the commonly used mean per-joint position error (MPJPE). Additionally, we show how the normalized perspective projection can be replaced to avoid this guaranteed minimal error. We evaluate the derived lower bounds on the most commonly used 3D human pose estimation benchmark datasets. Our results show that both projection models lead to an inherent minimal error between 19.3mm and 54.7mm, even after alignment in position and scale. This is a considerable share when comparing with recent state-of-the-art results. Our paper thus establishes a theoretical baseline that shows the importance of suitable projection models in weakly supervised 3D human pose estimation.
k-RNN: Extending NN-heuristics for the TSP
Oct 17, 2018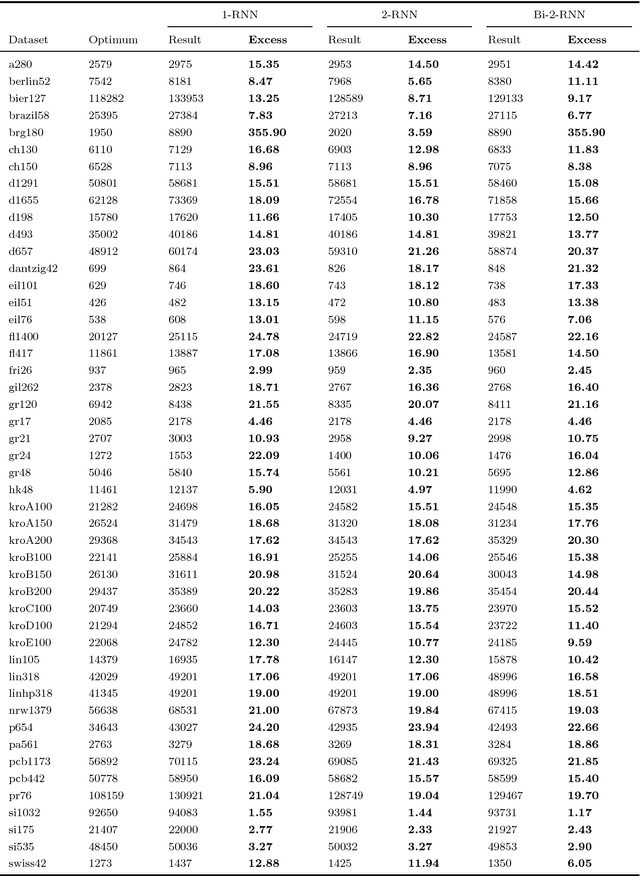
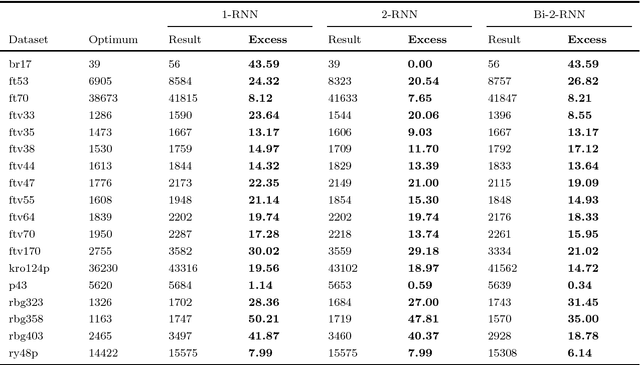
In this paper we present an extension of existing Nearest-Neighbor heuristics to an algorithm called k-Repetitive-Nearest-Neighbor. The idea is to start with a tour of k nodes and then perform a Nearest-Neighbor search from there on. After doing this for all permutations of k nodes the result gets selected as the shortest tour found. Experimental results show that for 2-RNN the solutions quality remains relatively stable between about 10% to 40% above the optimum.