 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgocentric Tactile and Proximity Sensors as Observation Priors for Humanoid Collision Avoidance
Apr 28, 2026Collision-free motion is often aided by tactile and proximity sensors distributed on the body of the robot due to their resistance to occlusion as opposed to external cameras. However, how to shape the sensor's properties, such as sensing coverage; type; and range, to enable avoidant behavior remains unclear. In this work, we present a reinforcement learning framework for whole-body collision avoidance on a humanoid H1-2 robot and use it to characterize how sensor properties shape learned avoidance behavior. Using dodgeball as a benchmark task, we ablate the properties of sensors distributed across the upper body of the robot and find that raw proximity measurements can substitute for explicit object localization provided the sensing range is sufficient and that sparse non-directional proximity signals outpace dense directional alternatives in sample efficiency.
3DFS: Deformable Dense Depth Fusion and Segmentation for Object Reconstruction from a Handheld Camera
Jul 27, 2016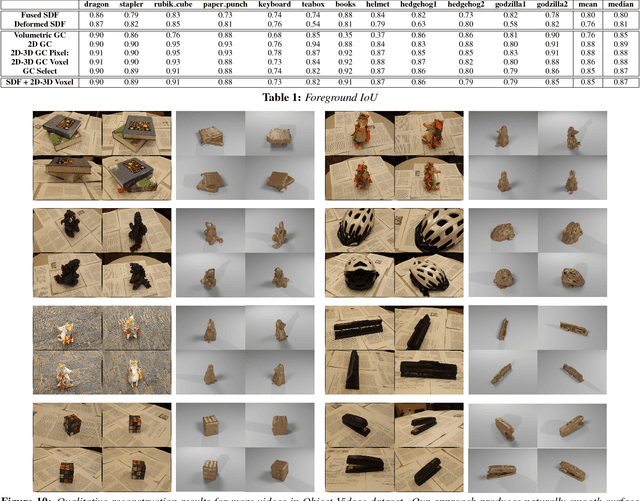
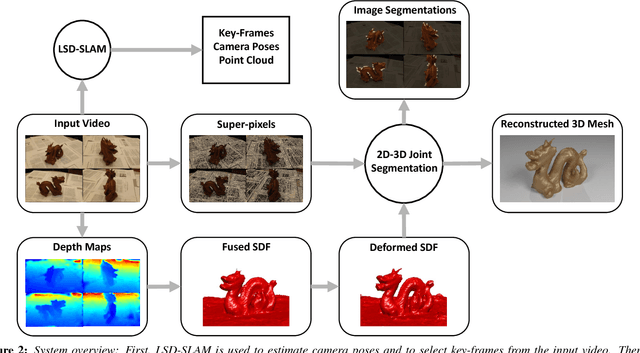
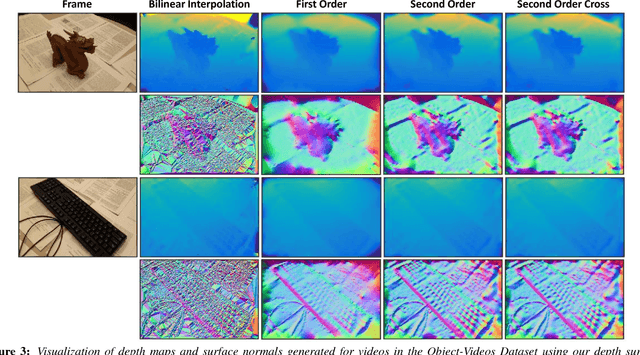
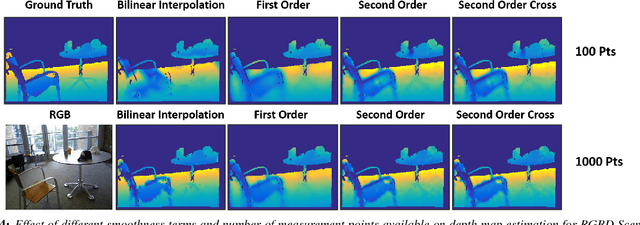
We propose an approach for 3D reconstruction and segmentation of a single object placed on a flat surface from an input video. Our approach is to perform dense depth map estimation for multiple views using a proposed objective function that preserves detail. The resulting depth maps are then fused using a proposed implicit surface function that is robust to estimation error, producing a smooth surface reconstruction of the entire scene. Finally, the object is segmented from the remaining scene using a proposed 2D-3D segmentation that incorporates image and depth cues with priors and regularization over the 3D volume and 2D segmentations. We evaluate 3D reconstructions qualitatively on our Object-Videos dataset, comparing to fusion, multiview stereo, and segmentation baselines. We also quantitatively evaluate the dense depth estimation using the RGBD Scenes V2 dataset [Henry et al. 2013] and the segmentation using keyframe annotations of the Object-Videos dataset.