 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRakutenAI-7B: Extending Large Language Models for Japanese
Mar 21, 2024



We introduce RakutenAI-7B, a suite of Japanese-oriented large language models that achieve the best performance on the Japanese LM Harness benchmarks among the open 7B models. Along with the foundation model, we release instruction- and chat-tuned models, RakutenAI-7B-instruct and RakutenAI-7B-chat respectively, under the Apache 2.0 license.
Robust and Accurate Object Velocity Detection by Stereo Camera for Autonomous Driving
Dec 01, 2020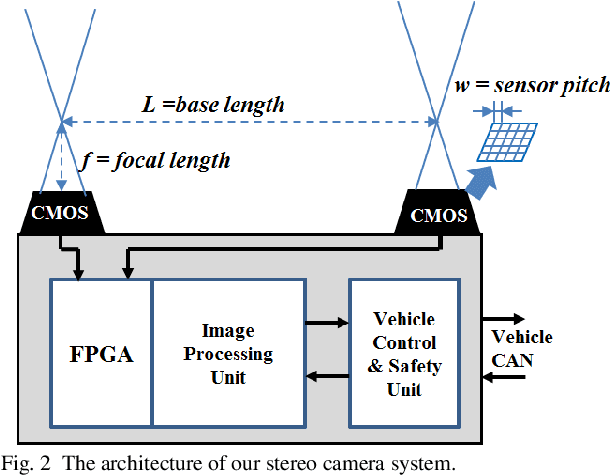


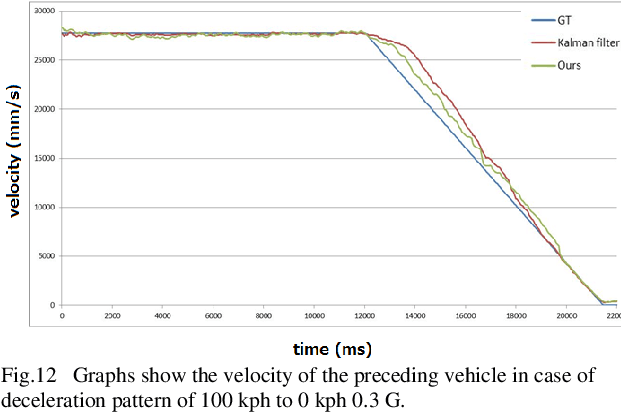
Although the number of camera-based sensors mounted on vehicles has recently increased dramatically, robust and accurate object velocity detection is difficult. Additionally, it is still common to use radar as a fusion system. We have developed a method to accurately detect the velocity of object using a camera, based on a large-scale dataset collected over 20 years by the automotive manufacturer, SUBARU. The proposed method consists of three methods: an High Dynamic Range (HDR) detection method that fuses multiple stereo disparity images, a fusion method that combines the results of monocular and stereo recognitions, and a new velocity calculation method. The evaluation was carried out using measurement devices and a test course that can quantitatively reproduce severe environment by mounting the developed stereo camera on an actual vehicle.