 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Exposure-Time-Aligned Primary-Path Architecture for Autonomous-Driving ECUs
Jun 09, 2026While end-to-end (E2E) autonomous driving has become the dominant research direction, production vehicles continue to rely on modular multi-NN pipelines for a non-trivial transitional period. The subject of this paper is the design of an architecture that, during this phase, supports a modular pipeline and an E2E path side by side and embeds a path for staged migration. Transplanted to a production SoC, egalitarian late fusion is compute-inefficient and offers no natural unit for staged E2E substitution. As an alternative, we propose three design principles: (i) Primary-Path, which explicitly selects a primary perception chain and prioritizes its enclosure within a single SoC pair over the non-critical paths (ii) Exposure-Time-Aligned, which propagates the primary sensor's exposure time $τ_{\rm exp}$ as a tag along the chain and event-drives the fusion node on matched $τ_{\rm exp}$ rather than a fixed cycle and (iii) Co-Path Coexistence, which, building on (i) and (ii), lets an E2E output path co-run with the modular pipeline within the same $τ_{\rm exp}$ cycle. On a Dual-SoC production AD-ECU, the implementation closes camera-shutter to planner-output latency at a mean of 296 ms within the 350 ms design budget. Under (iii), the modular pipeline is primary at production launch and the E2E path runs as shadow on real vehicles, and the E2E scope is expanded as evaluation evidence accumulates.
Dataset for Robust and Accurate Leading Vehicle Velocity Recognition
Apr 27, 2022
Recognition of the surrounding environment using a camera is an important technology in Advanced Driver-Assistance Systems and Autonomous Driving, and recognition technology is often solved by machine learning approaches such as deep learning in recent years. Machine learning requires datasets for learning and evaluation. To develop robust recognition technology in the real world, in addition to normal driving environment, data in environments that are difficult for cameras such as rainy weather or nighttime are essential. We have constructed a dataset that one can benchmark the technology, targeting the velocity recognition of the leading vehicle. This task is an important one for the Advanced Driver-Assistance Systems and Autonomous Driving. The dataset is available at https://signate.jp/competitions/657
Robust and Accurate Object Velocity Detection by Stereo Camera for Autonomous Driving
Dec 01, 2020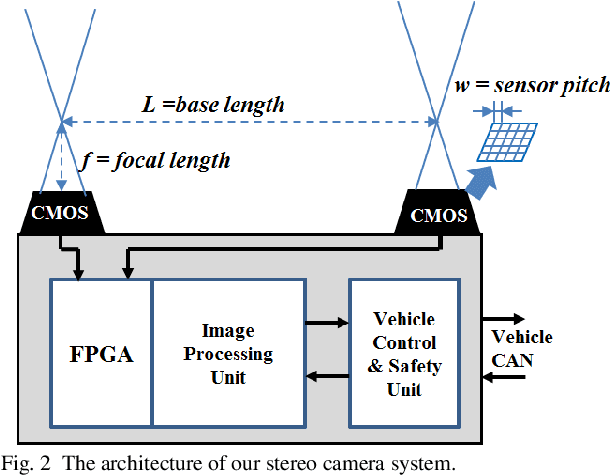


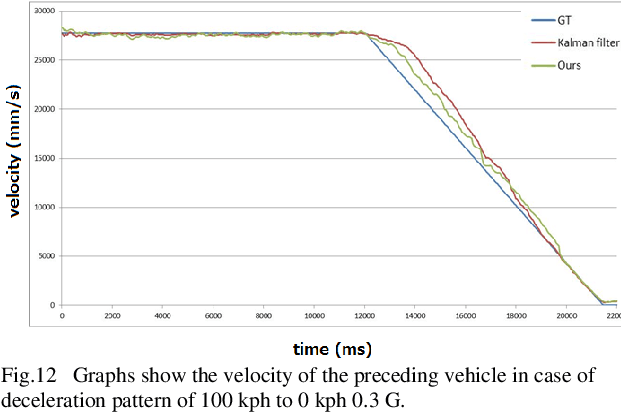
Although the number of camera-based sensors mounted on vehicles has recently increased dramatically, robust and accurate object velocity detection is difficult. Additionally, it is still common to use radar as a fusion system. We have developed a method to accurately detect the velocity of object using a camera, based on a large-scale dataset collected over 20 years by the automotive manufacturer, SUBARU. The proposed method consists of three methods: an High Dynamic Range (HDR) detection method that fuses multiple stereo disparity images, a fusion method that combines the results of monocular and stereo recognitions, and a new velocity calculation method. The evaluation was carried out using measurement devices and a test course that can quantitatively reproduce severe environment by mounting the developed stereo camera on an actual vehicle.