 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-Ordered Ad-hoc Resource Sharing for Independent Robotic Agents
Aug 15, 2024



Resource sharing is a crucial part of a multi-robot system. We propose a Boolean satisfiability based approach to resource sharing. Our key contributions are an algorithm for converting any constrained assignment to a weighted-SAT based optimization. We propose a theorem that allows optimal resource assignment problems to be solved via repeated application of a SAT solver. Additionally we show a way to encode continuous time ordering constraints using Conjunctive Normal Form (CNF). We benchmark our new algorithms and show that they can be used in an ad-hoc setting. We test our algorithms on a fleet of simulated and real world robots and show that the algorithms are able to handle real world situations. Our algorithms and test harnesses are opensource and build on Open-RMFs fleet management system.
Greedy Heuristics for Sampling-based Motion Planning in High-Dimensional State Spaces
May 06, 2024Sampling-based motion planning algorithms are very effective at finding solutions in high-dimensional continuous state spaces as they do not require prior approximations of the problem domain compared to traditional discrete graph-based searches. The anytime version of the Rapidly-exploring Random Trees (RRT) algorithm, denoted as RRT*, often finds high-quality solutions by incrementally approximating and searching the problem domain through random sampling. However, due to its low sampling efficiency and slow convergence rate, research has proposed many variants of RRT*, incorporating different heuristics and sampling strategies to overcome the constraints in complex planning problems. Yet, these approaches address specific convergence aspects of RRT* limitations, leaving a need for a sampling-based algorithm that can quickly find better solutions in complex high-dimensional state spaces with a faster convergence rate for practical motion planning applications. This article unifies and leverages the greedy search and heuristic techniques used in various RRT* variants to develop a greedy version of the anytime Rapidly-exploring Random Trees algorithm, denoted as Greedy RRT* (G-RRT*). It improves the initial solution-finding time of RRT* by maintaining two trees rooted at both the start and goal ends, advancing toward each other using greedy connection heuristics. It also accelerates the convergence rate of RRT* by introducing a greedy version of direct informed sampling procedure, which guides the sampling towards the promising region of the problem domain based on heuristics. We validate our approach on simulated planning problems, manipulation problems on Barrett WAM Arms, and on a self-reconfigurable robot, Panthera. Results show that G-RRT* produces asymptotically optimal solution paths and outperforms state-of-the-art RRT* variants, especially in high-dimensional planning problems.
WaspL: Design of a Reconfigurable Logistic Robot for Hospital Settings
Jul 07, 2021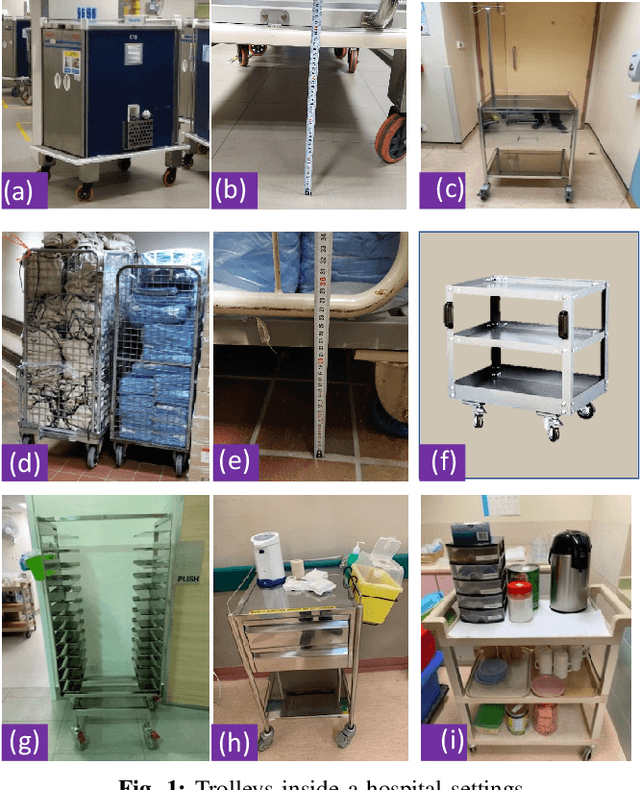
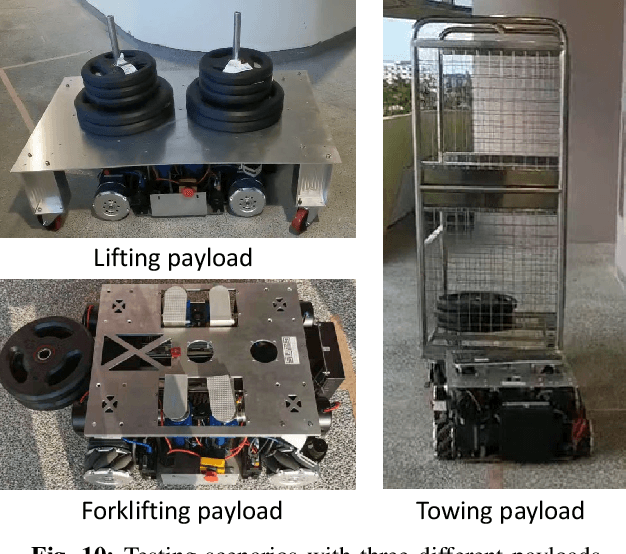
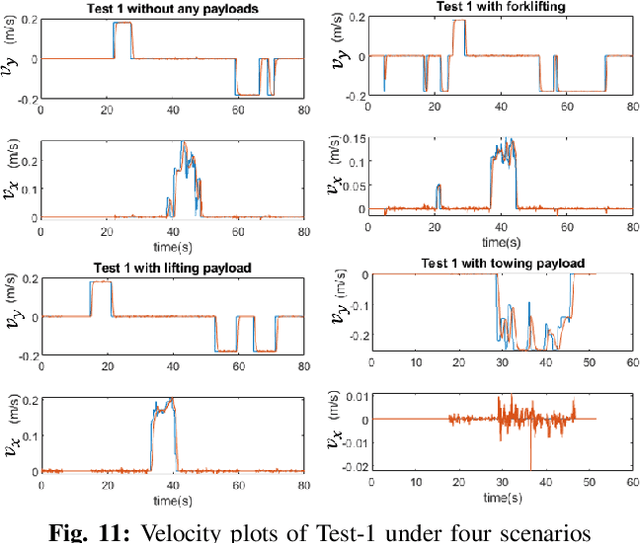
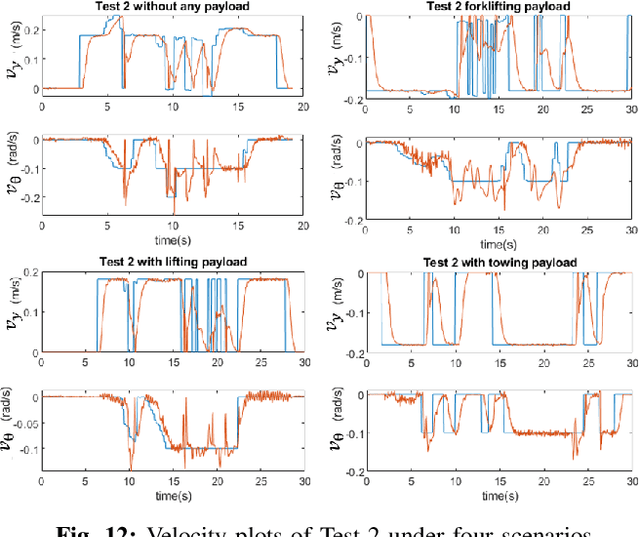
Healthcare poses diverse logistic requirements, which resulted in the deployment of several distinctly designed robots within a hospital setting. Each robot comes with its overheads in the form of, namely, none/limited scaling, dedicated charging stations, programming interface, closed architecture, training requirements, etc. This paper reports on developing a reconfigurable logistic robot named WaspL. The design of WaspL caters to the requirement of high mobility, open robotic operating system architecture, multi-functionality, and evolvability features. It fulfills multiple logistics modes, like towing, lifting heavy payloads, forklifting low ground clearance objects, nesting of two WaspL} etc., fulfilling different applications required in hospital settings. The design requirements, mechanical layout, and system architecture are discussed in detail. The finite element modeling, attribute-based comparison with other standard robots, are presented along with experimental results supporting the WaspL design capabilities.
Securing Autonomous Service Robots through Fuzzing, Detection, and Mitigation
Mar 12, 2020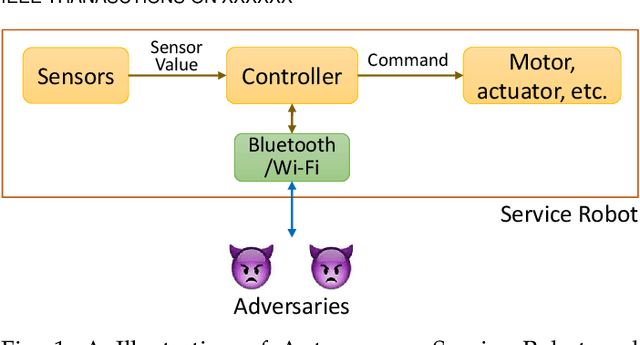
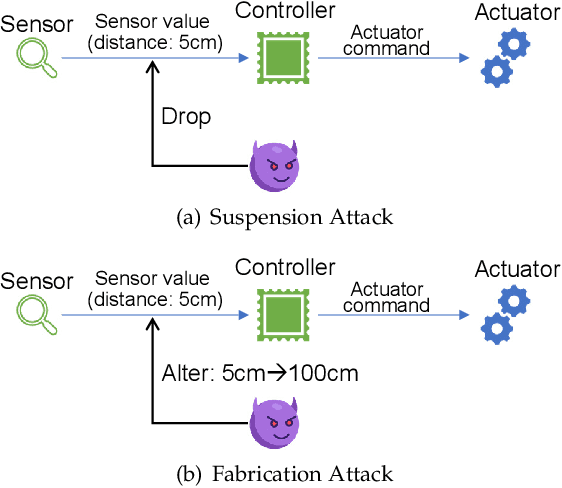


Autonomous service robots share social spaces with humans, usually working together for domestic or professional tasks. Cyber security breaches in such robots undermine the trust between humans and robots. In this paper, we investigate how to apprehend and inflict security threats at the design and implementation stage of a movable autonomous service robot. To this end, we leverage the idea of directed fuzzing and design RoboFuzz that systematically tests an autonomous service robot in line with the robot's states and the surrounding environment. The methodology of RoboFuzz is to study critical environmental parameters affecting the robot's state transitions and subject the robot control program with rational but harmful sensor values so as to compromise the robot. Furthermore, we develop detection and mitigation algorithms to counteract the impact of RoboFuzz. The difficulties mainly lie in the trade-off among limited computation resources, timely detection and the retention of work efficiency in mitigation. In particular, we propose detection and mitigation methods that take advantage of historical records of obstacles to detect inconsistent obstacle appearances regarding untrustworthy sensor values and navigate the movable robot to continue moving so as to carry on a planned task. By doing so, we manage to maintain a low cost for detection and mitigation but also retain the robot's work efficacy. We have prototyped the bundle of RoboFuzz, detection and mitigation algorithms in a real-world movable robot. Experimental results confirm that RoboFuzz makes a success rate of up to 93.3% in imposing concrete threats to the robot while the overall loss of work efficacy is merely 4.1% at the mitigation mode.
Path tracking control of self-reconfigurable robot hTetro with four differential drive units
Nov 20, 2019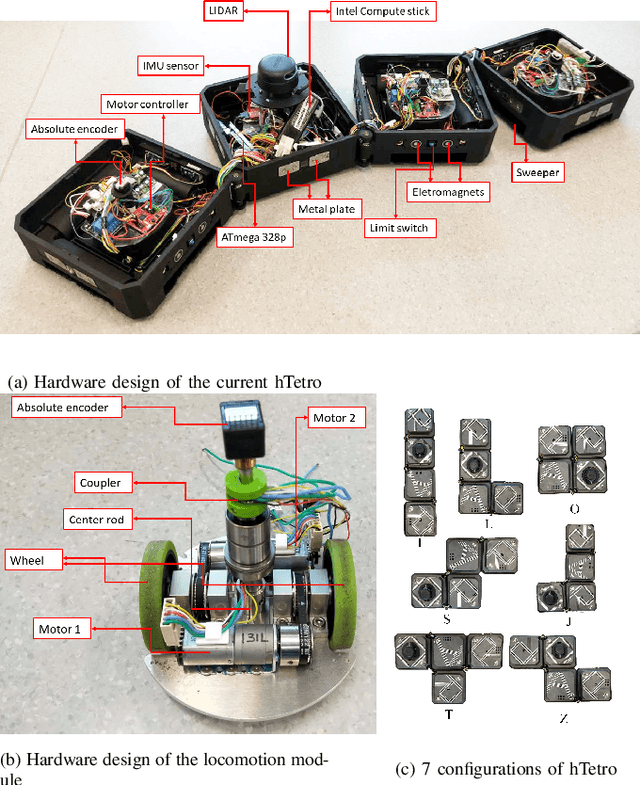
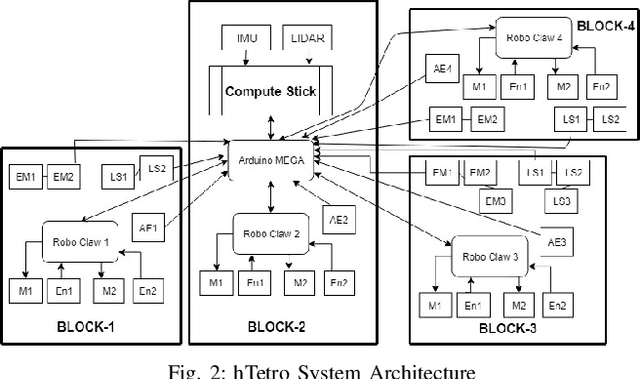
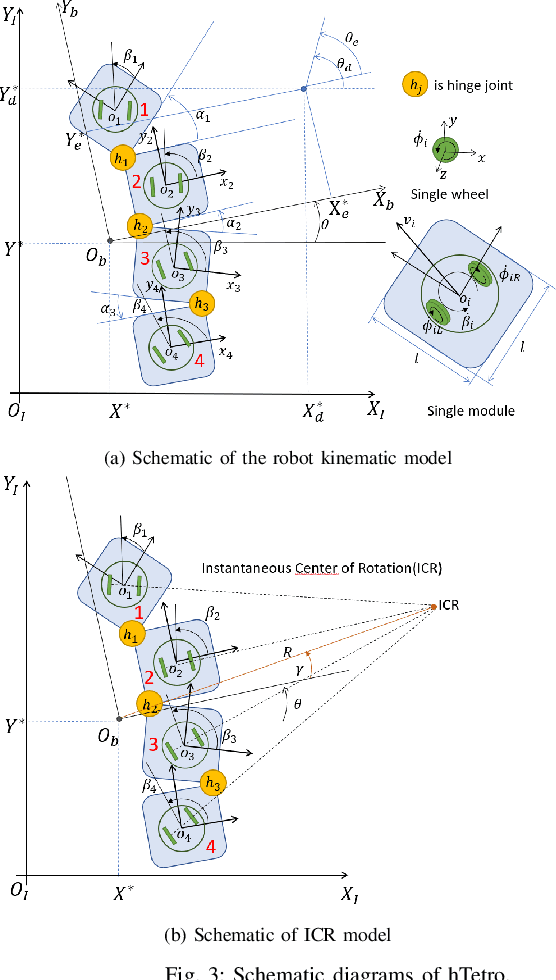
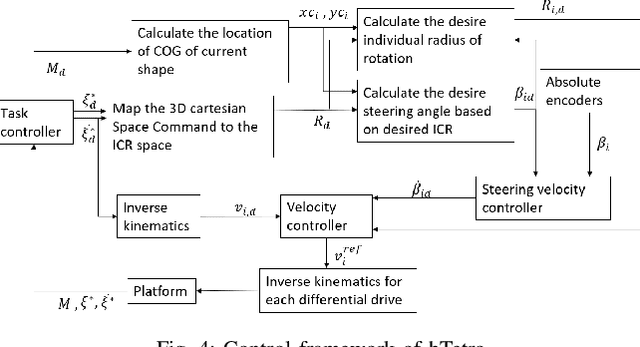
The research interest in robots with more than one steerable wheel has been increasing over recent years due to their high mobility while having a better payload capacity than systems using omnidirectional wheels. However, with more controllable degrees of freedom, almost all of the platforms include redundancy which leads to a modeling method based on the instantaneous center of rotation. The self-reconfigurable the robotic platform, hTetro, is designed for floor cleaning tasks. It also has four differential-drive units which can steer individually. Differing from most other steerable wheeled mobile robots, the wheel arrangement of this robot changes because of its reconfigurability. In this paper, we proposed a robust path tracking controller that can handle discontinuous trajectories and sudden orientation changes. Singularity problems are resolved on both the mechanical aspect and control aspect. The controller is tested experimentally with the self-reconfigurable robotic platform hTetro, and results are discussed.