 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUBP2: Uncertainty-Balanced Preference Planning for Efficient Preference-based Reinforcement Learning
Jun 17, 2026Preference-based RL provides an approach to learning reward models from pairwise comparisons of behaviors, bypassing the need for explicit reward design. However, existing methods typically rely on passive data collection and suffer from poor sample efficiency, especially during the early stages of learning. We introduce a model-based approach that actively directs exploration by jointly reasoning over uncertainties in the reward, dynamics, and value functions. Our method, Uncertainty-Balanced Preference Planning (UBP2), uses ensembles of reward, dynamics, and value function models to evaluate candidate trajectories according to a unified score that combines expected reward, terminal value, and epistemic uncertainty. Planning under this objective yields an explicit tradeoff between exploitation and information acquisition without requiring ad hoc exploration heuristics. Under standard regularity assumptions, we establish sublinear regret guarantees for both finite-horizon and infinite-horizon settings. Empirically, experiments on the Meta-World benchmark show UBP2 achieves substantially higher sample efficiency than model-free preference-based methods and non-optimistic model-based baselines.
BuildingNet: Learning to Label 3D Buildings
Oct 11, 2021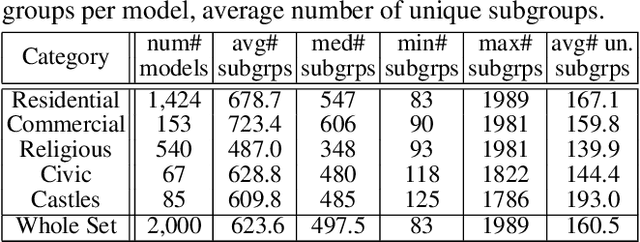

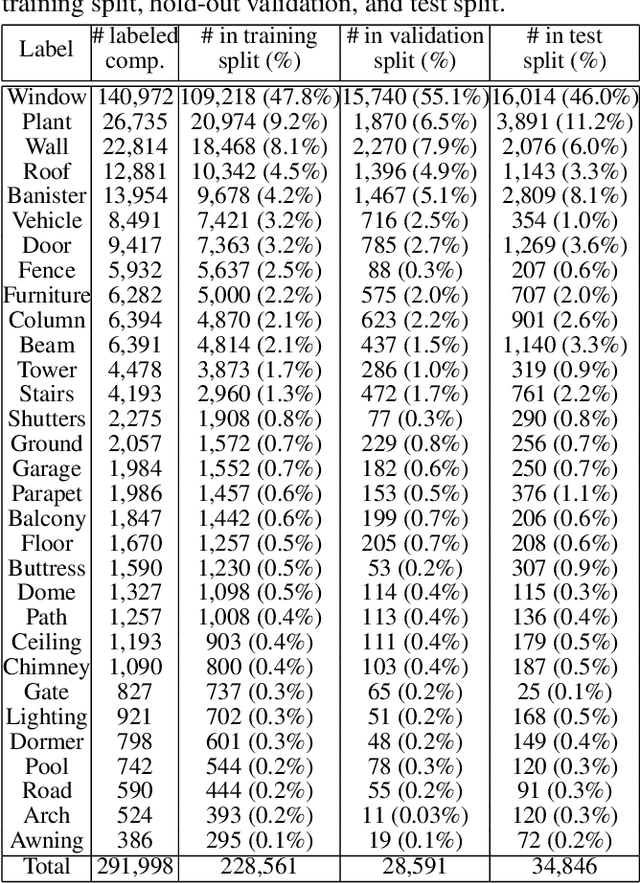
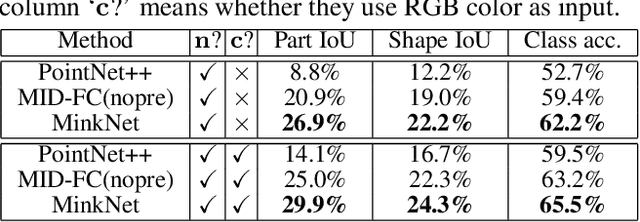
We introduce BuildingNet: (a) a large-scale dataset of 3D building models whose exteriors are consistently labeled, (b) a graph neural network that labels building meshes by analyzing spatial and structural relations of their geometric primitives. To create our dataset, we used crowdsourcing combined with expert guidance, resulting in 513K annotated mesh primitives, grouped into 292K semantic part components across 2K building models. The dataset covers several building categories, such as houses, churches, skyscrapers, town halls, libraries, and castles. We include a benchmark for evaluating mesh and point cloud labeling. Buildings have more challenging structural complexity compared to objects in existing benchmarks (e.g., ShapeNet, PartNet), thus, we hope that our dataset can nurture the development of algorithms that are able to cope with such large-scale geometric data for both vision and graphics tasks e.g., 3D semantic segmentation, part-based generative models, correspondences, texturing, and analysis of point cloud data acquired from real-world buildings. Finally, we show that our mesh-based graph neural network significantly improves performance over several baselines for labeling 3D meshes.
Neural Contours: Learning to Draw Lines from 3D Shapes
Apr 05, 2020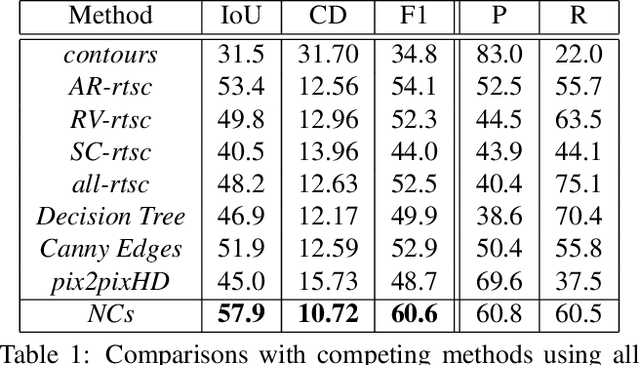
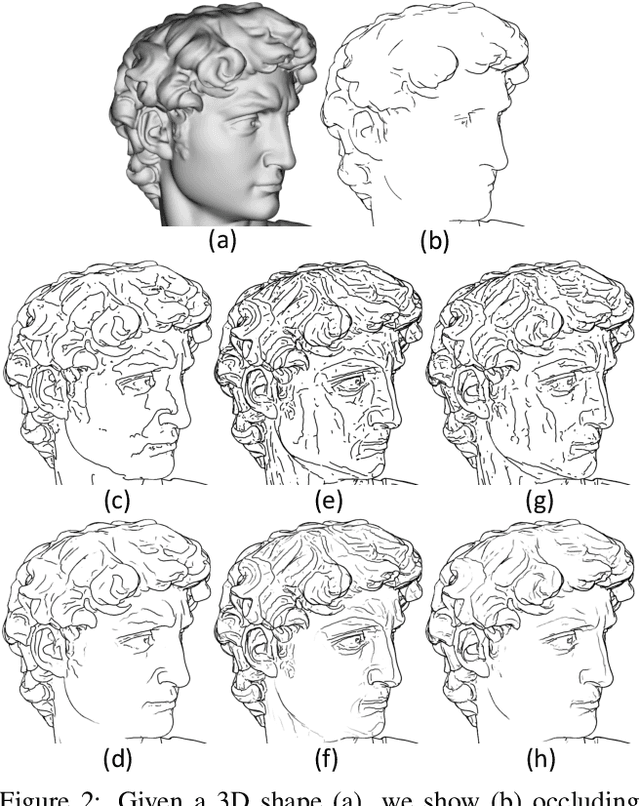
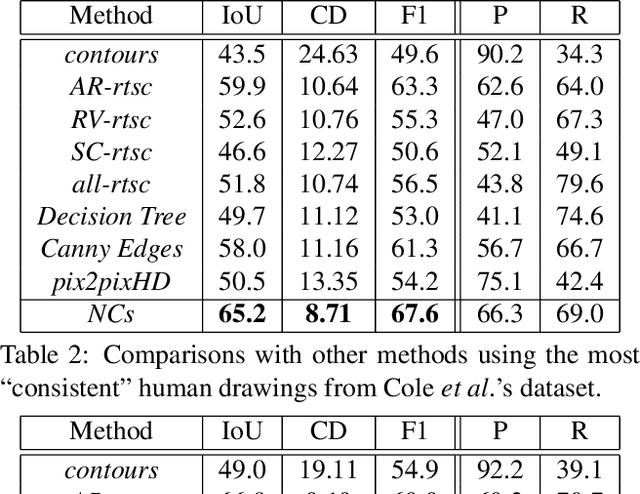
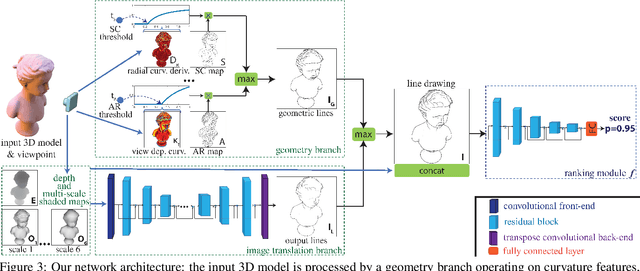
This paper introduces a method for learning to generate line drawings from 3D models. Our architecture incorporates a differentiable module operating on geometric features of the 3D model, and an image-based module operating on view-based shape representations. At test time, geometric and view-based reasoning are combined with the help of a neural module to create a line drawing. The model is trained on a large number of crowdsourced comparisons of line drawings. Experiments demonstrate that our method achieves significant improvements in line drawing over the state-of-the-art when evaluated on standard benchmarks, resulting in drawings that are comparable to those produced by experienced human artists.