 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Single Multi-Task Deep Neural Network with a Multi-Scale Feature Aggregation Mechanism for Manipulation Relationship Reasoning in Robotic Grasping
May 23, 2023



Grasping specific objects in complex and irregularly stacked scenes is still challenging for robotics. Because the robot is not only required to identify the object's grasping posture but also needs to reason the manipulation relationship between the objects. In this paper, we propose a manipulation relationship reasoning network with a multi-scale feature aggregation (MSFA) mechanism for robot grasping tasks. MSFA aggregates high-level semantic information and low-level spatial information in a cross-scale connection way to improve the generalization ability of the model. Furthermore, to improve the accuracy, we propose to use intersection features with rich location priors for manipulation relationship reasoning. Experiments are validated in VMRD datasets and real environments, respectively. The experimental results demonstrate that our proposed method can accurately predict the manipulation relationship between objects in the scene of multi-object stacking. Compared with previous methods, it significantly improves reasoning speed and accuracy.
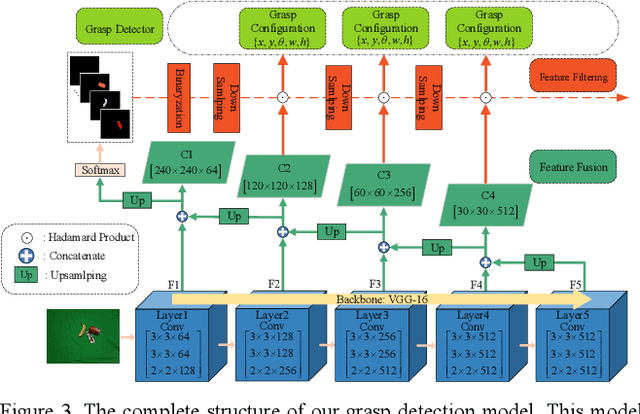
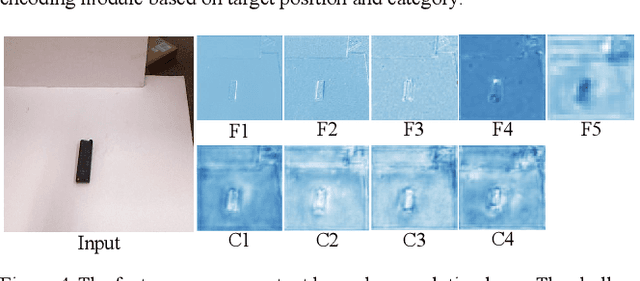
Robotic grasp detection based on Transformer
May 30, 2022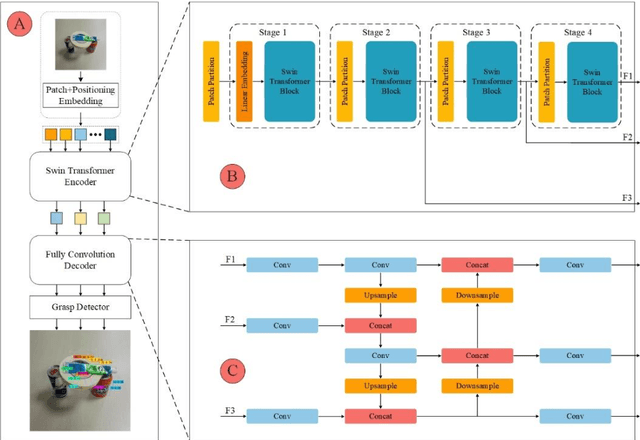
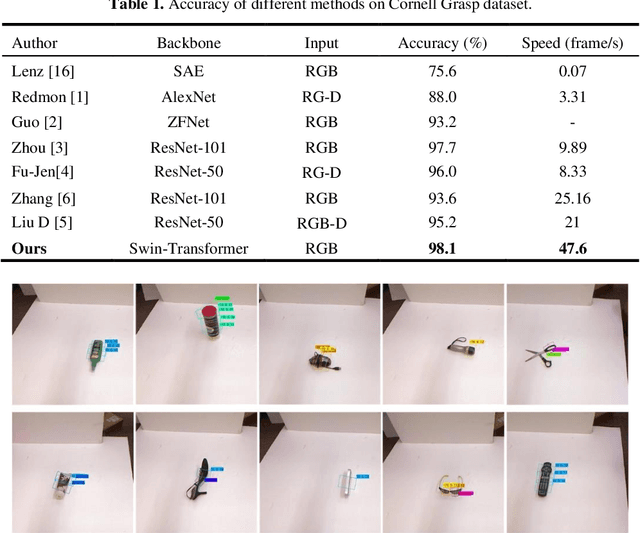
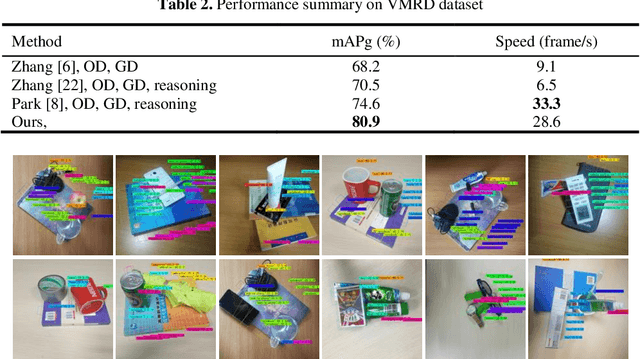
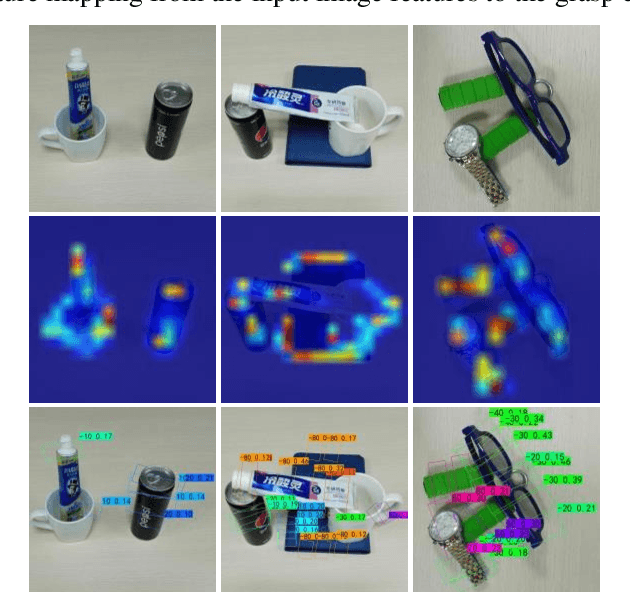
Grasp detection in a cluttered environment is still a great challenge for robots. Currently, the Transformer mechanism has been successfully applied to visual tasks, and its excellent ability of global context information extraction provides a feasible way to improve the performance of robotic grasp detection in cluttered scenes. However, the insufficient inductive bias ability of the original Transformer model requires large-scale datasets training, which is difficult to obtain for grasp detection. In this paper, we propose a grasp detection model based on encoder-decoder structure. The encoder uses a Transformer network to extract global context information. The decoder uses a fully convolutional neural network to improve the inductive bias capability of the model and combine features extracted by the encoder to predict the final grasp configuration. Experiments on the VMRD dataset demonstrate that our model performs much better in overlapping object scenes. Meanwhile, on the Cornell Grasp dataset, our approach achieves an accuracy of 98.1%, which is comparable with state-of-the-art algorithms.
Real-World Semantic Grasping Detection
Nov 20, 2021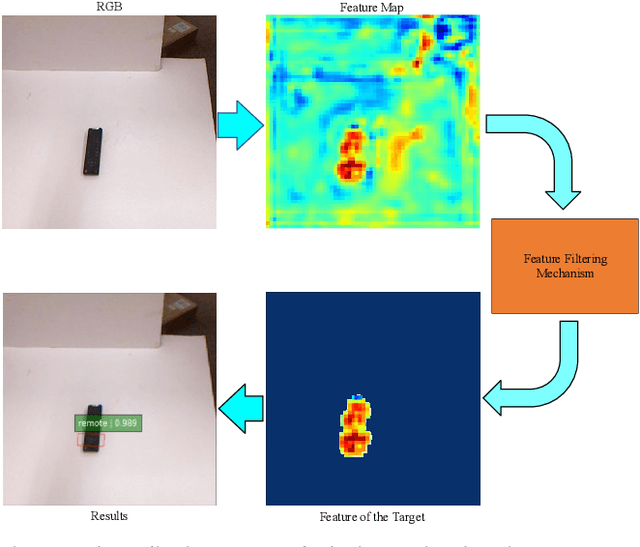
Reducing the scope of grasping detection according to the semantic information of the target is significant to improve the accuracy of the grasping detection model and expand its application. Researchers have been trying to combine these capabilities in an end-to-end network to grasp specific objects in a cluttered scene efficiently. In this paper, we propose an end-to-end semantic grasping detection model, which can accomplish both semantic recognition and grasping detection. And we also design a target feature filtering mechanism, which only maintains the features of a single object according to the semantic information for grasping detection. This method effectively reduces the background features that are weakly correlated to the target object, thus making the features more unique and guaranteeing the accuracy and efficiency of grasping detection. Experimental results show that the proposed method can achieve 98.38% accuracy in Cornell grasping dataset Furthermore, our results on different datasets or evaluation metrics show the domain adaptability of our method over the state-of-the-art.
Mask-GD Segmentation Based Robotic Grasp Detection
Jan 20, 2021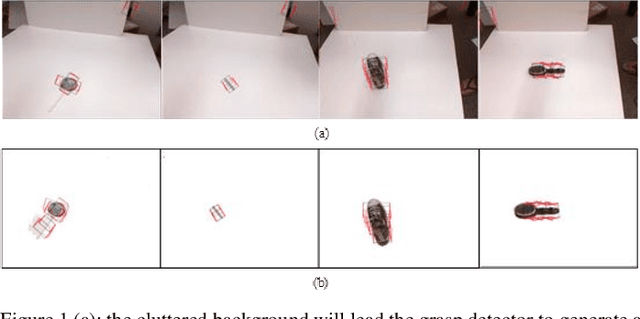
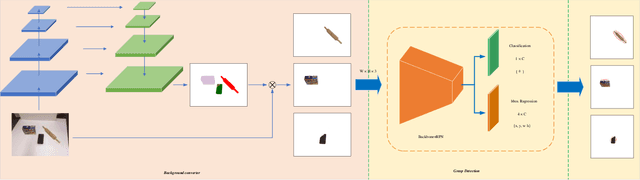
The reliability of grasp detection for target objects in complex scenes is a challenging task and a critical problem that needs to be solved urgently in practical application. At present, the grasp detection location comes from searching the feature space of the whole image. However, the cluttered background information in the image impairs the accuracy of grasping detection. In this paper, a robotic grasp detection algorithm named MASK-GD is proposed, which provides a feasible solution to this problem. MASK is a segmented image that only contains the pixels of the target object. MASK-GD for grasp detection only uses MASK features rather than the features of the entire image in the scene. It has two stages: the first stage is to provide the MASK of the target object as the input image, and the second stage is a grasp detector based on the MASK feature. Experimental results demonstrate that MASK-GD's performance is comparable with state-of-the-art grasp detection algorithms on Cornell Datasets and Jacquard Dataset. In the meantime, MASK-GD performs much better in complex scenes.