 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Architecture for Neural Enhanced Multiobject Tracking
Oct 08, 2024



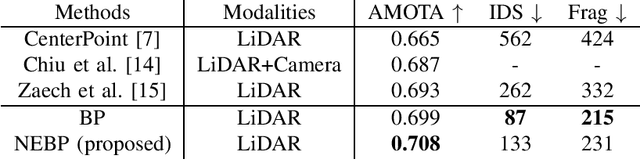
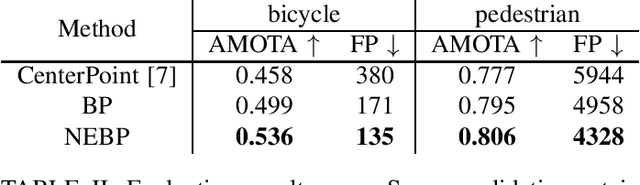
Multiobject tracking (MOT) is an important task in robotics, autonomous driving, and maritime surveillance. Traditional work on MOT is model-based and aims to establish algorithms in the framework of sequential Bayesian estimation. More recent methods are fully data-driven and rely on the training of neural networks. The two approaches have demonstrated advantages in certain scenarios. In particular, in problems where plenty of labeled data for the training of neural networks is available, data-driven MOT tends to have advantages compared to traditional methods. A natural thought is whether a general and efficient framework can integrate the two approaches. This paper advances a recently introduced hybrid model-based and data-driven method called neural-enhanced belief propagation (NEBP). Compared to existing work on NEBP for MOT, it introduces a novel neural architecture that can improve data association and new object initialization, two critical aspects of MOT. The proposed tracking method is leading the nuScenes LiDAR-only tracking challenge at the time of submission of this paper.
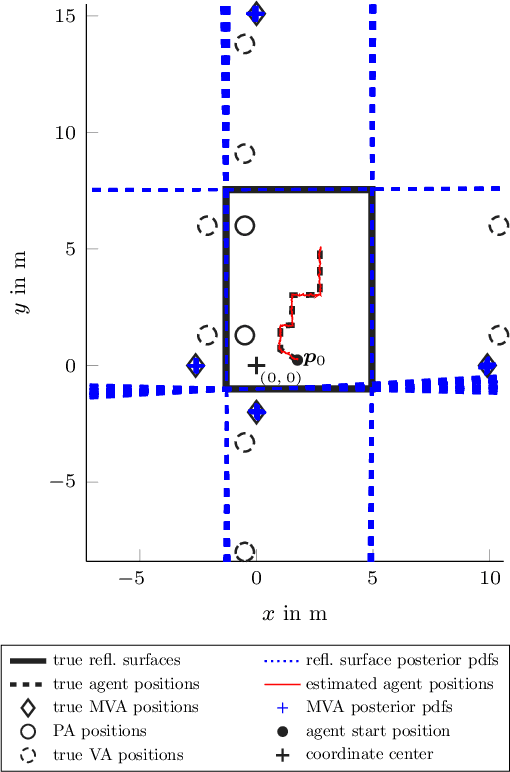
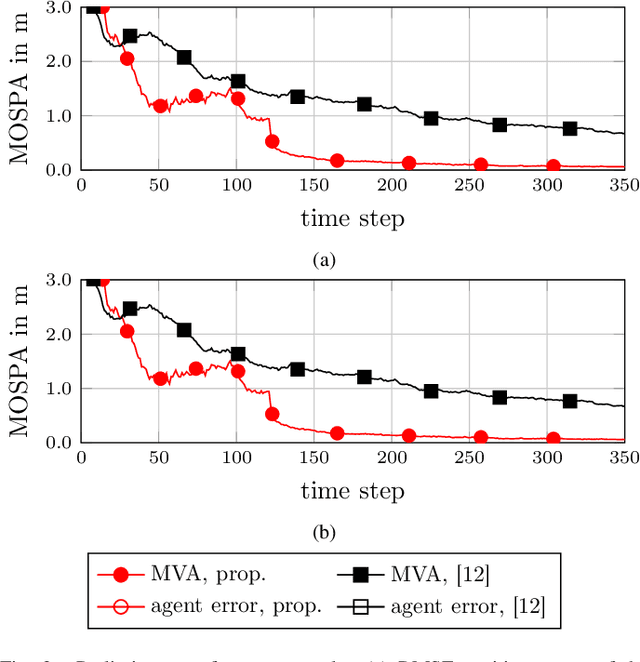
Direct Multipath-Based SLAM
Sep 30, 2024In future wireless networks, the availability of information on the position of mobile agents and the propagation environment can enable new services and increase the throughput and robustness of communications. Multipath-based simultaneous localization and mapping (SLAM) aims at estimating the position of agents and reflecting features in the environment by exploiting the relationship between the local geometry and multipath components (MPCs) in received radio signals. Existing multipath-based SLAM methods preprocess received radio signals using a channel estimator. The channel estimator lowers the data rate by extracting a set of dispersion parameters for each MPC. These parameters are then used as measurements for SLAM. Bayesian estimation for multipath-based SLAM is facilitated by the lower data rate. However, due to finite resolution capabilities limited by signal bandwidth, channel estimation is prone to errors and MPC parameters may be extracted incorrectly and lead to a reduced SLAM performance. We propose a multipath-based SLAM approach that directly uses received radio signals as inputs. A new statistical model that can effectively be represented by a factor graph is introduced. The factor graph is the starting point for the development of an efficient belief propagation (BP) method for multipath-based SLAM that avoids data preprocessing by a channel estimator. Numerical results based on synthetic and real data in challenging single-input, single-output (SISO) scenarios demonstrate that the proposed method outperforms conventional methods in terms of localization and mapping accuracy.
A Belief Propagation Approach for Direct Multipath-Based SLAM
Dec 24, 2023In this work, we develop a multipath-based simultaneous localization and mapping (SLAM) method that can directly be applied to received radio signals. In existing multipath-based SLAM approaches, a channel estimator is used as a preprocessing stage that reduces data flow and computational complexity by extracting features related to multipath components (MPCs). We aim to avoid any preprocessing stage that may lead to a loss of relevant information. The presented method relies on a new statistical model for the data generation process of the received radio signal that can be represented by a factor graph. This factor graph is the starting point for the development of an efficient belief propagation (BP) method for multipath-based SLAM that directly uses received radio signals as measurements. Simulation results in a realistic scenario with a single-input single-output (SISO) channel demonstrate that the proposed direct method for radio-based SLAM outperforms state-of-the-art methods that rely on a channel estimator.
A BP Method for Track-Before-Detect
Jul 03, 2023


Tracking an unknown number of low-observable objects is notoriously challenging. This letter proposes a sequential Bayesian estimation method based on the track-before-detect (TBD) approach. In TBD, raw sensor measurements are directly used by the tracking algorithm without any preprocessing. Our proposed method is based on a new statistical model that introduces a new object hypothesis for each data cell of the raw sensor measurements. It allows objects to interact and contribute to more than one data cell. Based on the factor graph representing our statistical model, we derive the message passing equations of the proposed belief propagation (BP) method for TBD. Approximations are applied to certain BP messages to reduce computational complexity and improve scalability. In a simulation experiment, our proposed BP-based TBD method outperforms two other state-of-the-art TBD methods.
Neural Enhanced Belief Propagation for Multiobject Tracking
Dec 16, 2022



Algorithmic solutions for multi-object tracking (MOT) are a key enabler for applications in autonomous navigation and applied ocean sciences. State-of-the-art MOT methods fully rely on a statistical model and typically use preprocessed sensor data as measurements. In particular, measurements are produced by a detector that extracts potential object locations from the raw sensor data collected for a discrete time step. This preparatory processing step reduces data flow and computational complexity but may result in a loss of information. State-of-the-art Bayesian MOT methods that are based on belief propagation (BP) systematically exploit graph structures of the statistical model to reduce computational complexity and improve scalability. However, as a fully model-based approach, BP can only provide suboptimal estimates when there is a mismatch between the statistical model and the true data-generating process. Existing BP-based MOT methods can further only make use of preprocessed measurements. In this paper, we introduce a variant of BP that combines model-based with data-driven MOT. The proposed neural enhanced belief propagation (NEBP) method complements the statistical model of BP by information learned from raw sensor data. This approach conjectures that the learned information can reduce model mismatch and thus improve data association and false alarm rejection. Our NEBP method improves tracking performance compared to model-based methods. At the same time, it inherits the advantages of BP-based MOT, i.e., it scales only quadratically in the number of objects, and it can thus generate and maintain a large number of object tracks. We evaluate the performance of our NEBP approach for MOT on the nuScenes autonomous driving dataset and demonstrate that it has state-of-the-art performance.
Data Fusion for Radio Frequency SLAM with Robust Sampling
Jun 20, 2022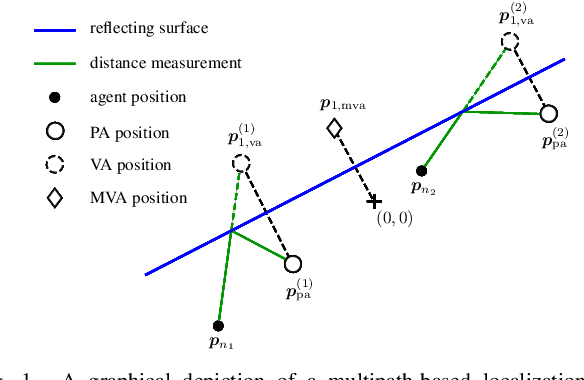
Precise indoor localization remains a challenging problem for a variety of essential applications. A promising approach to address this problem is to exchange radio signals between mobile agents and static physical anchors (PAs) that bounce off flat surfaces in the indoor environment. Radio frequency simultaneous localization and mapping (RF-SLAM) methods can be used to jointly estimates the time-varying location of agents as well as the static locations of the flat surfaces. Recent work on RF-SLAM methods has shown that each surface can be efficiently represented by a single master virtual anchor (MVA). The measurement model related to this MVA-based RF-SLAM method is highly nonlinear. Thus, Bayesian estimation relies on sampling-based techniques. The original MVA-based RF-SLAM method employs conventional "bootstrap" sampling. In challenging scenarios it was observed that the original method might converge to incorrect MVA positions corresponding to local maxima. In this paper, we introduce MVA-based RF-SLAM with an improved sampling technique that succeeds in the aforementioned challenging scenarios. Our simulation results demonstrate significant performance advantages.
Neural Enhanced Belief Propagation for Data Association in Multiobject Tracking
Mar 26, 2022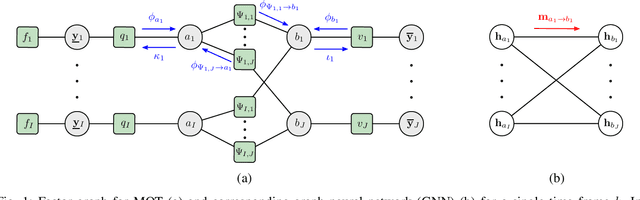
Situation-aware technologies enabled by multiobject tracking (MOT) methods will create new services and applications in fields such as autonomous navigation and applied ocean sciences. Belief propagation (BP) is a state-of-the-art method for Bayesian MOT but fully relies on a statistical model and preprocessed sensor measurements. In this paper, we establish a hybrid method for model-based and data-driven MOT. The proposed neural enhanced belief propagation (NEBP) approach complements BP by information learned from raw sensor data with the goal to improve data association and to reject false alarm measurements. We evaluate the performance of our NEBP approach for MOT on the nuScenes autonomous driving dataset and demonstrate that it can outperform state-of-the-art reference methods.
Neural Enhanced Belief Propagation for Cooperative Localization
May 27, 2021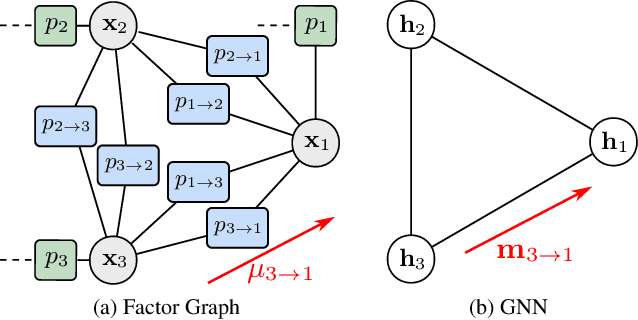
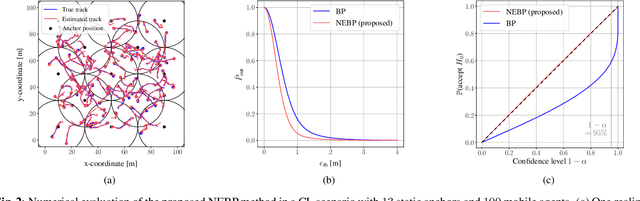
Location-aware networks will introduce innovative services and applications for modern convenience, applied ocean sciences, and public safety. In this paper, we establish a hybrid method for model-based and data-driven inference. We consider a cooperative localization (CL) scenario where the mobile agents in a wireless network aim to localize themselves by performing pairwise observations with other agents and by exchanging location information. A traditional method for distributed CL in large agent networks is belief propagation (BP) which is completely model-based and is known to suffer from providing inconsistent (overconfident) estimates. The proposed approach addresses these limitations by complementing BP with learned information provided by a graph neural network (GNN). We demonstrate numerically that our method can improve estimation accuracy and avoid overconfident beliefs, while its computational complexity remains comparable to BP. Notably, more consistent beliefs are obtained by not explicitly addressing overconfidence in the loss function used for training of the GNN.