 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeENIGMA-360: An Ego-Exo Dataset for Human Behavior Understanding in Industrial Scenarios
Mar 11, 2026Understanding human behavior from complementary egocentric (ego) and exocentric (exo) points of view enables the development of systems that can support workers in industrial environments and enhance their safety. However, progress in this area is hindered by the lack of datasets capturing both views in realistic industrial scenarios. To address this gap, we propose ENIGMA-360, a new ego-exo dataset acquired in a real industrial scenario. The dataset is composed of 180 egocentric and 180 exocentric procedural videos temporally synchronized offering complementary information of the same scene. The 360 videos have been labeled with temporal and spatial annotations, enabling the study of different aspects of human behavior in industrial domain. We provide baseline experiments for 3 foundational tasks for human behavior understanding: 1) Temporal Action Segmentation, 2) Keystep Recognition and 3) Egocentric Human-Object Interaction Detection, showing the limits of state-of-the-art approaches on this challenging scenario. These results highlight the need for new models capable of robust ego-exo understanding in real-world environments. We publicly release the dataset and its annotations at https://fpv-iplab.github.io/ENIGMA-360/.
ProSkill: Segment-Level Skill Assessment in Procedural Videos
Jan 28, 2026Skill assessment in procedural videos is crucial for the objective evaluation of human performance in settings such as manufacturing and procedural daily tasks. Current research on skill assessment has predominantly focused on sports and lacks large-scale datasets for complex procedural activities. Existing studies typically involve only a limited number of actions, focus on either pairwise assessments (e.g., A is better than B) or on binary labels (e.g., good execution vs needs improvement). In response to these shortcomings, we introduce ProSkill, the first benchmark dataset for action-level skill assessment in procedural tasks. ProSkill provides absolute skill assessment annotations, along with pairwise ones. This is enabled by a novel and scalable annotation protocol that allows for the creation of an absolute skill assessment ranking starting from pairwise assessments. This protocol leverages a Swiss Tournament scheme for efficient pairwise comparisons, which are then aggregated into consistent, continuous global scores using an ELO-based rating system. We use our dataset to benchmark the main state-of-the-art skill assessment algorithms, including both ranking-based and pairwise paradigms. The suboptimal results achieved by the current state-of-the-art highlight the challenges and thus the value of ProSkill in the context of skill assessment for procedural videos. All data and code are available at https://fpv-iplab.github.io/ProSkill/
Ego-EXTRA: video-language Egocentric Dataset for EXpert-TRAinee assistance
Dec 15, 2025We present Ego-EXTRA, a video-language Egocentric Dataset for EXpert-TRAinee assistance. Ego-EXTRA features 50 hours of unscripted egocentric videos of subjects performing procedural activities (the trainees) while guided by real-world experts who provide guidance and answer specific questions using natural language. Following a ``Wizard of OZ'' data collection paradigm, the expert enacts a wearable intelligent assistant, looking at the activities performed by the trainee exclusively from their egocentric point of view, answering questions when asked by the trainee, or proactively interacting with suggestions during the procedures. This unique data collection protocol enables Ego-EXTRA to capture a high-quality dialogue in which expert-level feedback is provided to the trainee. Two-way dialogues between experts and trainees are recorded, transcribed, and used to create a novel benchmark comprising more than 15k high-quality Visual Question Answer sets, which we use to evaluate Multimodal Large Language Models. The results show that Ego-EXTRA is challenging and highlight the limitations of current models when used to provide expert-level assistance to the user. The Ego-EXTRA dataset is publicly available to support the benchmark of egocentric video-language assistants: https://fpv-iplab.github.io/Ego-EXTRA/.
A Real-Time System for Egocentric Hand-Object Interaction Detection in Industrial Domains
Jul 17, 2025Hand-object interaction detection remains an open challenge in real-time applications, where intuitive user experiences depend on fast and accurate detection of interactions with surrounding objects. We propose an efficient approach for detecting hand-objects interactions from streaming egocentric vision that operates in real time. Our approach consists of an action recognition module and an object detection module for identifying active objects upon confirmed interaction. Our Mamba model with EfficientNetV2 as backbone for action recognition achieves 38.52% p-AP on the ENIGMA-51 benchmark at 30fps, while our fine-tuned YOLOWorld reaches 85.13% AP for hand and object. We implement our models in a cascaded architecture where the action recognition and object detection modules operate sequentially. When the action recognition predicts a contact state, it activates the object detection module, which in turn performs inference on the relevant frame to detect and classify the active object.
Eyes Wide Unshut: Unsupervised Mistake Detection in Egocentric Video by Detecting Unpredictable Gaze
Jun 12, 2024



In this paper, we address the challenge of unsupervised mistake detection in egocentric video through the analysis of gaze signals, a critical component for advancing user assistance in smart glasses. Traditional supervised methods, reliant on manually labeled mistakes, suffer from domain-dependence and scalability issues. This research introduces an unsupervised method for detecting mistakes in videos of human activities, overcoming the challenges of domain-specific requirements and the necessity for annotated data. By analyzing unusual gaze patterns that signal user disorientation during tasks, we propose a gaze completion model that forecasts eye gaze trajectories from incomplete inputs. The difference between the anticipated and observed gaze paths acts as an indicator for identifying errors. Our method is validated on the EPIC-Tent dataset, showing its superiority compared to current one-class supervised and unsupervised techniques.
ENIGMA-51: Towards a Fine-Grained Understanding of Human-Object Interactions in Industrial Scenarios
Sep 26, 2023ENIGMA-51 is a new egocentric dataset acquired in a real industrial domain by 19 subjects who followed instructions to complete the repair of electrical boards using industrial tools (e.g., electric screwdriver) and electronic instruments (e.g., oscilloscope). The 51 sequences are densely annotated with a rich set of labels that enable the systematic study of human-object interactions in the industrial domain. We provide benchmarks on four tasks related to human-object interactions: 1) untrimmed action detection, 2) egocentric human-object interaction detection, 3) short-term object interaction anticipation and 4) natural language understanding of intents and entities. Baseline results show that the ENIGMA-51 dataset poses a challenging benchmark to study human-object interactions in industrial scenarios. We publicly release the dataset at: https://iplab.dmi.unict.it/ENIGMA-51/.
Weakly Supervised Attended Object Detection Using Gaze Data as Annotations
Apr 14, 2022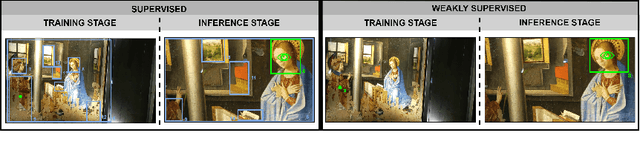

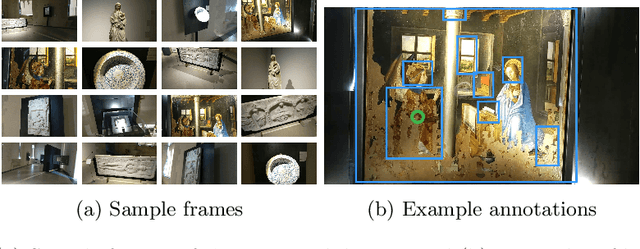
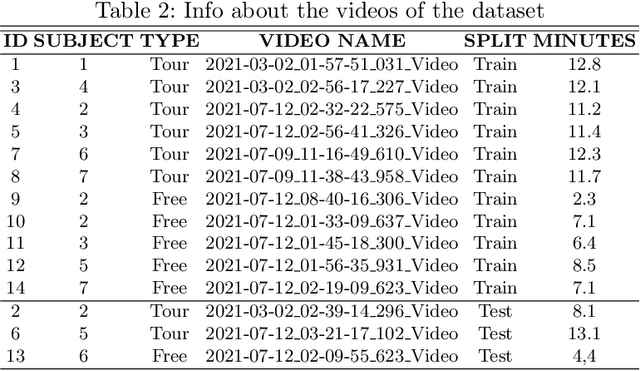
We consider the problem of detecting and recognizing the objects observed by visitors (i.e., attended objects) in cultural sites from egocentric vision. A standard approach to the problem involves detecting all objects and selecting the one which best overlaps with the gaze of the visitor, measured through a gaze tracker. Since labeling large amounts of data to train a standard object detector is expensive in terms of costs and time, we propose a weakly supervised version of the task which leans only on gaze data and a frame-level label indicating the class of the attended object. To study the problem, we present a new dataset composed of egocentric videos and gaze coordinates of subjects visiting a museum. We hence compare three different baselines for weakly supervised attended object detection on the collected data. Results show that the considered approaches achieve satisfactory performance in a weakly supervised manner, which allows for significant time savings with respect to a fully supervised detector based on Faster R-CNN. To encourage research on the topic, we publicly release the code and the dataset at the following url: https://iplab.dmi.unict.it/WS_OBJ_DET/