 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpineWave: Harnessing Fish Rigid-Flexible Spinal Kinematics for Enhancing Biomimetic Robotic Locomotion
May 22, 2025Fish have endured millions of years of evolution, and their distinct rigid-flexible body structures offer inspiration for overcoming challenges in underwater robotics, such as limited mobility, high energy consumption, and adaptability. This paper introduces SpineWave, a biomimetic robotic fish featuring a fish-spine-like rigid-flexible transition structure. The structure integrates expandable fishbone-like ribs and adjustable magnets, mimicking the stretch and recoil of fish muscles to balance rigidity and flexibility. In addition, we employed an evolutionary algorithm to optimize the hydrodynamics of the robot, achieving significant improvements in swimming performance. Real-world tests demonstrated robustness and potential for environmental monitoring, underwater exploration, and industrial inspection. These tests established SpineWave as a transformative platform for aquatic robotics.
Deep Learning of Vortex Induced Vibrations
Aug 26, 2018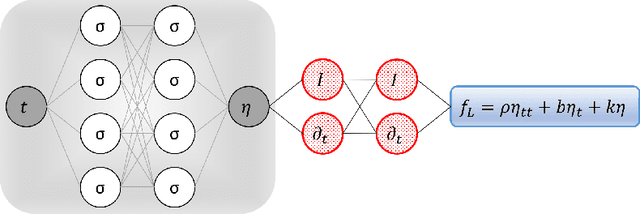
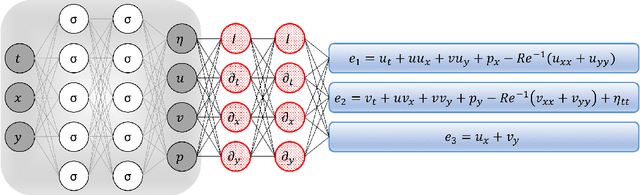
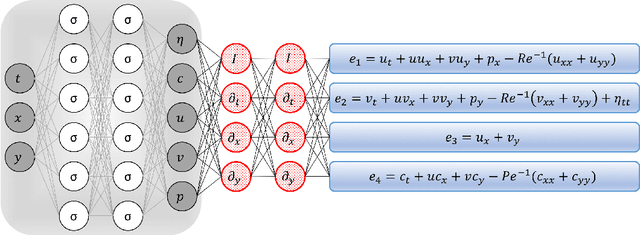
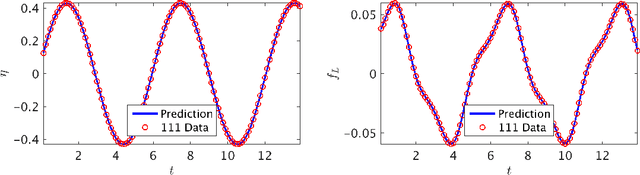
Vortex induced vibrations of bluff bodies occur when the vortex shedding frequency is close to the natural frequency of the structure. Of interest is the prediction of the lift and drag forces on the structure given some limited and scattered information on the velocity field. This is an inverse problem that is not straightforward to solve using standard computational fluid dynamics (CFD) methods, especially since no information is provided for the pressure. An even greater challenge is to infer the lift and drag forces given some dye or smoke visualizations of the flow field. Here we employ deep neural networks that are extended to encode the incompressible Navier-Stokes equations coupled with the structure's dynamic motion equation. In the first case, given scattered data in space-time on the velocity field and the structure's motion, we use four coupled deep neural networks to infer very accurately the structural parameters, the entire time-dependent pressure field (with no prior training data), and reconstruct the velocity vector field and the structure's dynamic motion. In the second case, given scattered data in space-time on a concentration field only, we use five coupled deep neural networks to infer very accurately the vector velocity field and all other quantities of interest as before. This new paradigm of inference in fluid mechanics for coupled multi-physics problems enables velocity and pressure quantification from flow snapshots in small subdomains and can be exploited for flow control applications and also for system identification.