 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoCUS: A multi-robot loss-tolerant algorithm for surveying volcanic plumes
Sep 01, 2020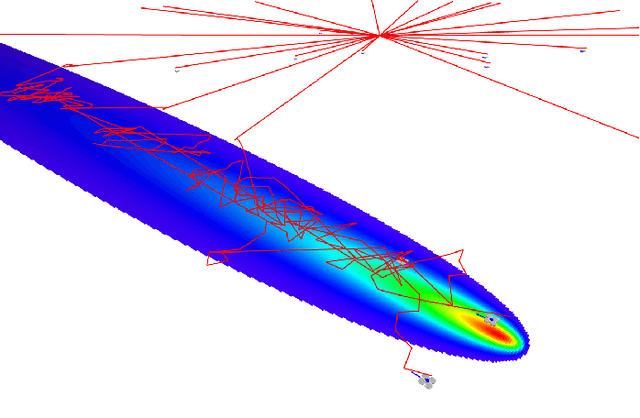
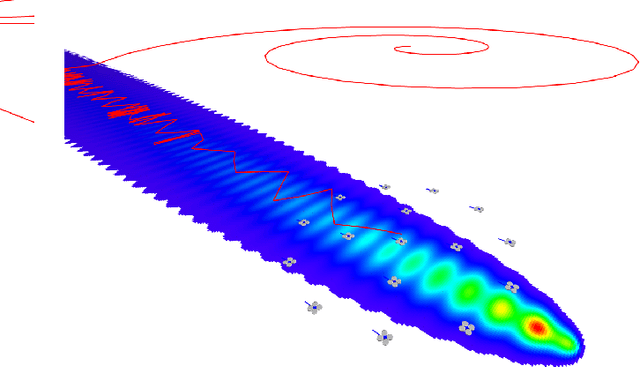
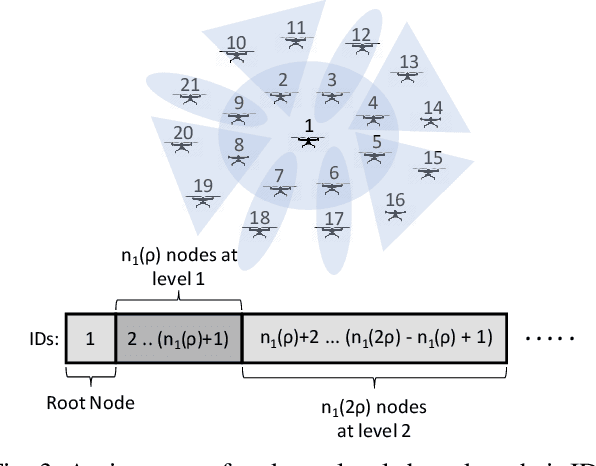
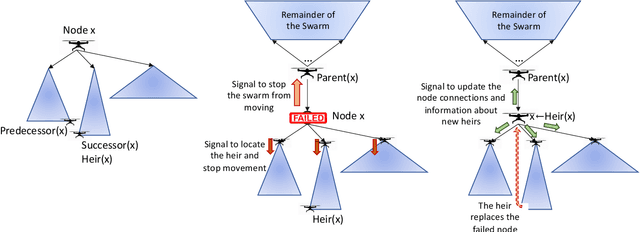
Measurement of volcanic CO2 flux by a drone swarm poses special challenges. Drones must be able to follow gas concentration gradients while tolerating frequent drone loss. We present the LoCUS algorithm as a solution to this problem and prove its robustness. LoCUS relies on swarm coordination and self-healing to solve the task. As a point of contrast we also implement the MoBS algorithm, derived from previously published work, which allows drones to solve the task independently. We compare the effectiveness of these algorithms using drone simulations, and find that LoCUS provides a reliable and efficient solution to the volcano survey problem. Further, the novel data-structures and algorithms underpinning LoCUS have application in other areas of fault-tolerant algorithm research.
The Swarmathon: An Autonomous Swarm Robotics Competition
May 21, 2018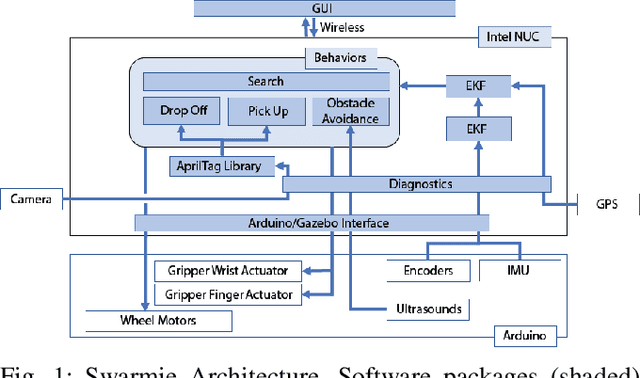
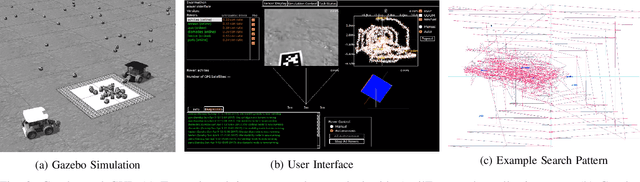

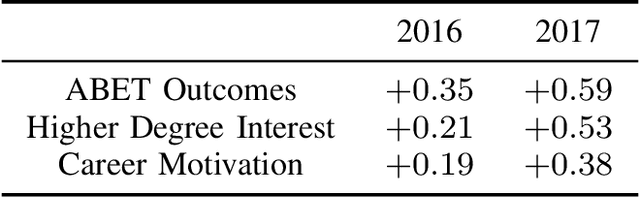
The Swarmathon is a swarm robotics programming challenge that engages college students from minority-serving institutions in NASA's Journey to Mars. Teams compete by programming a group of robots to search for, pick up, and drop off resources in a collection zone. The Swarmathon produces prototypes for robot swarms that would collect resources on the surface of Mars. Robots operate completely autonomously with no global map, and each team's algorithm must be sufficiently flexible to effectively find resources from a variety of unknown distributions. The Swarmathon includes Physical and Virtual Competitions. Physical competitors test their algorithms on robots they build at their schools; they then upload their code to run autonomously on identical robots during the three day competition in an outdoor arena at Kennedy Space Center. Virtual competitors complete an identical challenge in simulation. Participants mentor local teams to compete in a separate High School Division. In the first 2 years, over 1,100 students participated. 63% of students were from underrepresented ethnic and racial groups. Participants had significant gains in both interest and core robotic competencies that were equivalent across gender and racial groups, suggesting that the Swarmathon is effectively educating a diverse population of future roboticists.
A Scalable and Adaptable Multiple-Place Foraging Algorithm for Ant-Inspired Robot Swarms
Dec 01, 2016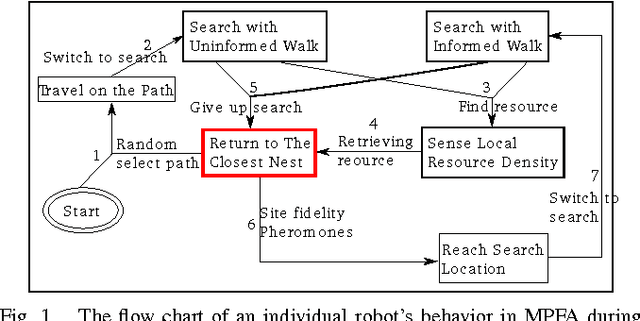
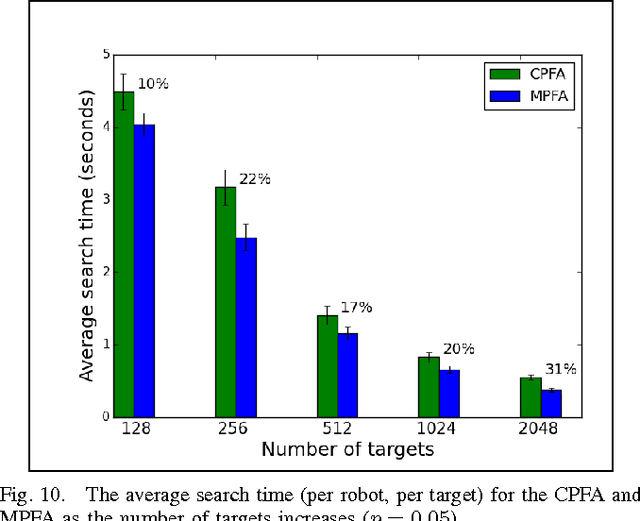
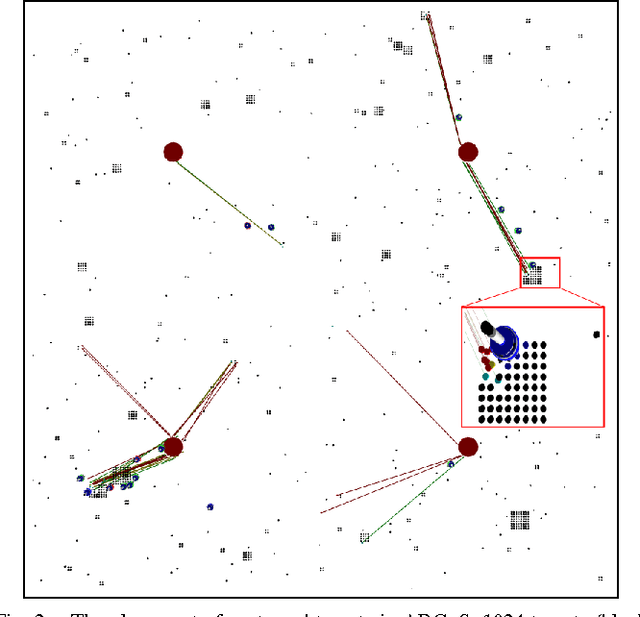
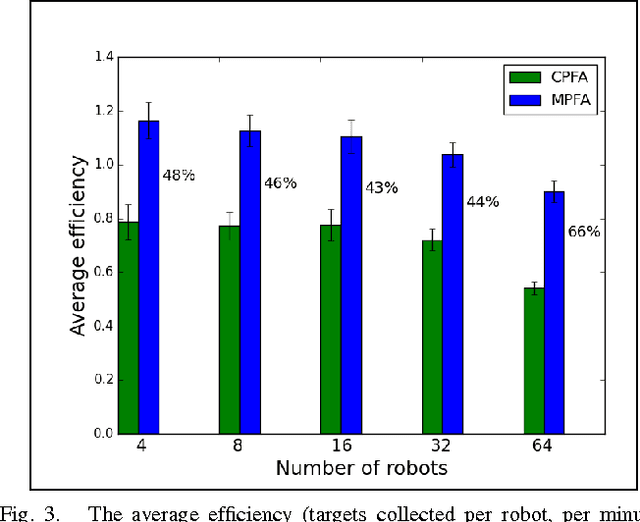
Individual robots are not effective at exploring large unmapped areas. An alternate approach is to use a swarm of simple robots that work together, rather than a single highly capable robot. The central-place foraging algorithm (CPFA) is effective for coordinating robot swarm search and collection tasks. Robots start at a centrally placed location (nest), explore potential targets in the area without global localization or central control, and return the targets to the nest. The scalability of the CPFA is limited because large numbers of robots produce more inter-robot collisions and large search areas result in substantial travel costs. We address these problems with the multiple-place foraging algorithm (MPFA), which uses multiple nests distributed throughout the search area. Robots start from a randomly assigned home nest but return to the closest nest with found targets. We simulate the foraging behavior of robot swarms in the robot simulator ARGoS and employ a genetic algorithm to discover different optimized foraging strategies as swarm sizes and the number of targets are scaled up. In our experiments, the MPFA always produces higher foraging rates, fewer collisions, and lower travel and search time compared to the CPFA for the partially clustered targets distribution. The main contribution of this paper is that we systematically quantify the advantages of the MPFA (reduced travel time and collisions), the potential disadvantages (less communication among robots), and the ability of a genetic algorithm to tune MPFA parameters to mitigate search inefficiency due to less communication.
Exploiting Heterogeneous Robotic Systems in Cooperative Missions
Sep 03, 2015
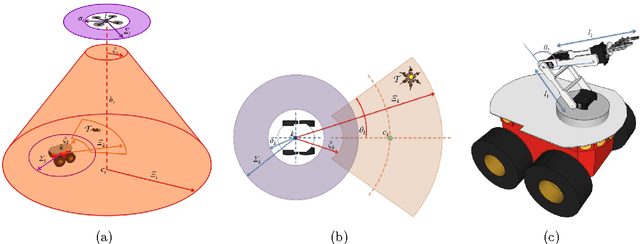
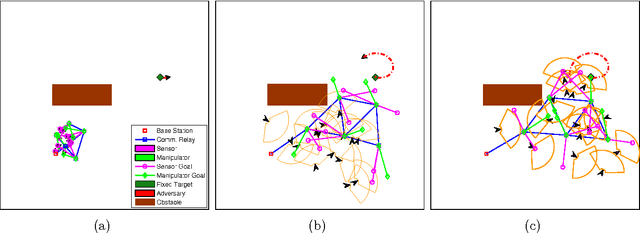
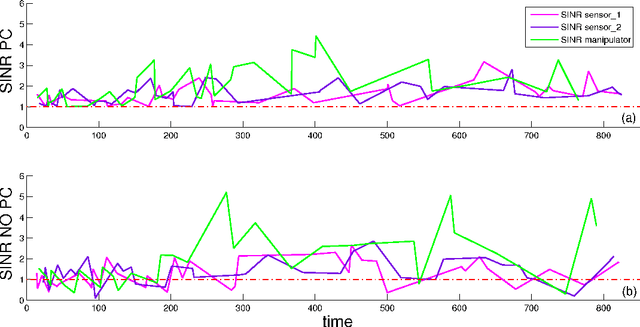
In this paper we consider the problem of coordinating robotic systems with different kinematics, sensing and vision capabilities to achieve certain mission goals. An approach that makes use of a heterogeneous team of agents has several advantages when cost, integration of capabilities, or large search areas need to be considered. A heterogeneous team allows for the robots to become "specialized", accomplish sub-goals more effectively, and thus increase the overall mission efficiency. Two main scenarios are considered in this work. In the first case study we exploit mobility to implement a power control algorithm that increases the Signal to Interference plus Noise Ratio (SINR) among certain members of the network. We create realistic sensing fields and manipulation by using the geometric properties of the sensor field-of-view and the manipulability metric, respectively. The control strategy for each agent of the heterogeneous system is governed by an artificial physics law that considers the different kinematics of the agents and the environment, in a decentralized fashion. Through simulation results we show that the network is able to stay connected at all times and covers the environment well. The second scenario studied in this paper is the biologically-inspired coordination of heterogeneous physical robotic systems. A team of ground rovers, designed to emulate desert seed-harvester ants, explore an experimental area using behaviors fine-tuned in simulation by a genetic algorithm. Our robots coordinate with a base station and collect clusters of resources scattered within the experimental space. We demonstrate experimentally that through coordination with an aerial vehicle, our ant-like ground robots are able to collect resources two times faster than without the use of heterogeneous coordination.