 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe On-Orbit Dislodging of Deployable Structures via Robust Adaptive MPC
Mar 21, 2025



This paper proposes a novel robust adaptive model predictive controller for on-orbit dislodging. We consider the scenario where a servicer, equipped with a robot arm, must dislodge a client, a time-varying system composed of an underpowered jammed solar panel with a hybrid hinge system on a space station. Our approach leverages online set-membership identification to reduce the uncertainty to provide robust safety guarantees during dislodging despite bounded disturbances while balancing exploration and exploitation effectively in the parameter space. The feasibility of the developed robust adaptive MPC method is also examined through dislodging simulations and hardware experiments in zero-gravity and gravity environments, respectively. In addition, the advantages of our method are shown through comparison experiments with several state-of-the-art control schemes for both accuracy of parameter estimation and control performance.
Adaptive Robot Detumbling of a Non-Rigid Satellite
Jul 24, 2024The challenge of satellite stabilization, particularly those with uncertain flexible dynamics, has become a pressing concern in control and robotics. These uncertainties, especially the dynamics of a third-party client satellite, significantly complicate the stabilization task. This paper introduces a novel adaptive detumbling method to handle non-rigid satellites with unknown motion dynamics (translation and rotation). The distinctive feature of our approach is that we model the non-rigid tumbling satellite as a two-link serial chain with unknown stiffness and damping in contrast to previous detumbling research works which consider the satellite a rigid body. We develop a novel adaptive robotics approach to detumble the satellite by using two space tugs as servicer despite the uncertain dynamics in the post-capture case. Notably, the stiffness properties and other physical parameters, including the mass and inertia of the two links, remain unknown to the servicer. Our proposed method addresses the challenges in detumbling tasks and paves the way for advanced manipulation of non-rigid satellites with uncertain dynamics.
Decentralized Adaptive Aerospace Transportation of Unknown Loads Using A Team of Robots
Jul 10, 2024



Transportation missions in aerospace are limited to the capability of each aerospace robot and the properties of the target transported object, such as mass, inertia, and grasping locations. We present a novel decentralized adaptive controller design for multiple robots that can be implemented in different kinds of aerospace robots. Our controller adapts to unknown objects in different gravity environments. We validate our method in an aerial scenario using multiple fully actuated hexarotors with grasping capabilities, and a space scenario using a group of space tugs. In both scenarios, the robots transport a payload cooperatively through desired three-dimensional trajectories. We show that our method can adapt to unexpected changes that include the loss of robots during the transportation mission.
Real-time Quadrotor Navigation Through Planning in Depth Space in Unstructured Environments
Oct 18, 2020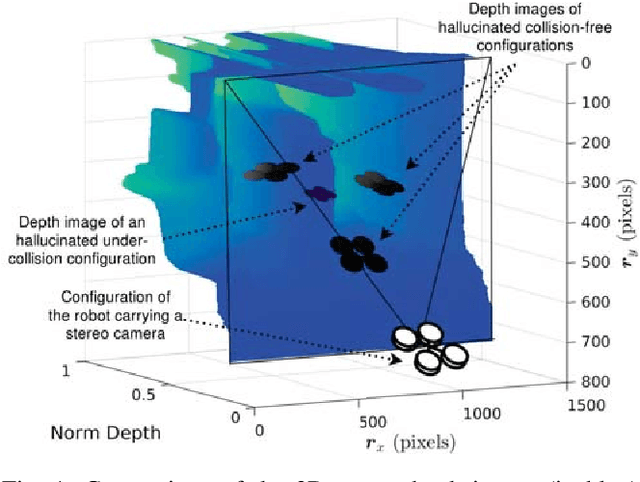
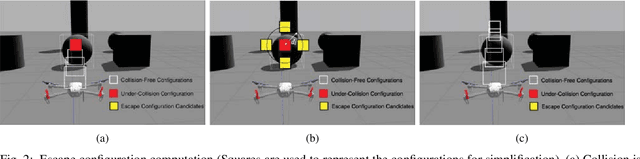
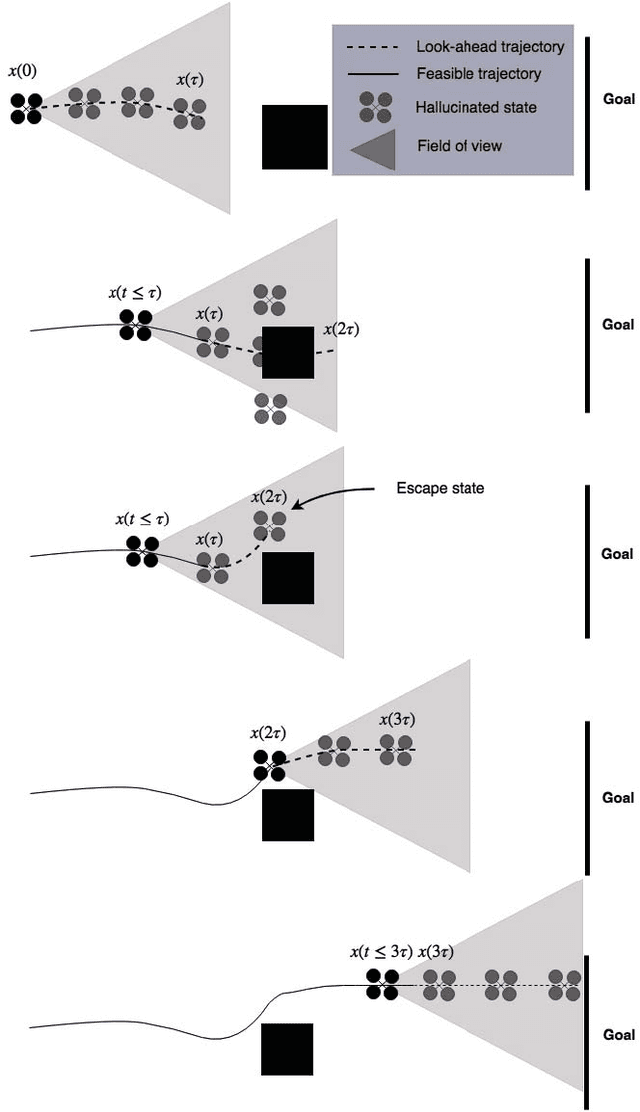
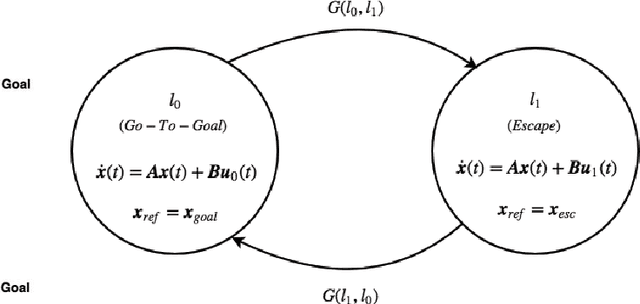
This paper addresses the problem of real-time vision-based autonomous obstacle avoidance in unstructured environments for quadrotor UAVs. We assume that our UAV is equipped with a forward facing stereo camera as the only sensor to perceive the world around it. Moreover, all the computations are performed onboard. Feasible trajectory generation in this kind of problems requires rapid collision checks along with efficient planning algorithms. We propose a trajectory generation approach in the depth image space, which refers to the environment information as depicted by the depth images. In order to predict the collision in a look ahead robot trajectory, we create depth images from the sequence of robot poses along the path. We compare these images with the depth images of the actual world sensed through the forward facing stereo camera. We aim at generating fuel optimal trajectories inside the depth image space. In case of a predicted collision, a switching strategy is used to aggressively deviate the quadrotor away from the obstacle. For this purpose we use two closed loop motion primitives based on Linear Quadratic Regulator (LQR) objective functions. The proposed approach is validated through simulation and hardware experiments.
Exploiting Heterogeneous Robotic Systems in Cooperative Missions
Sep 03, 2015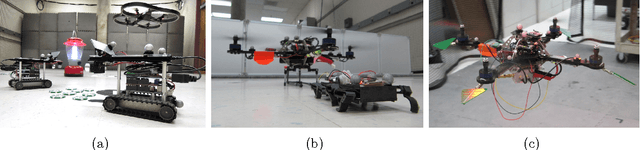
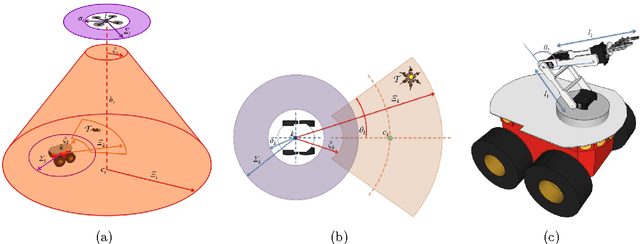
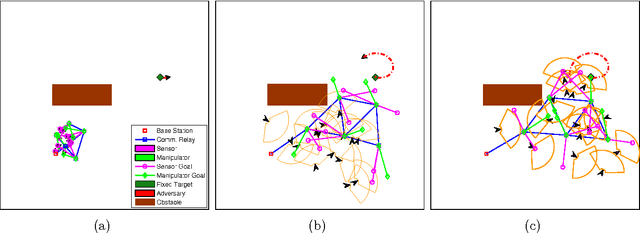
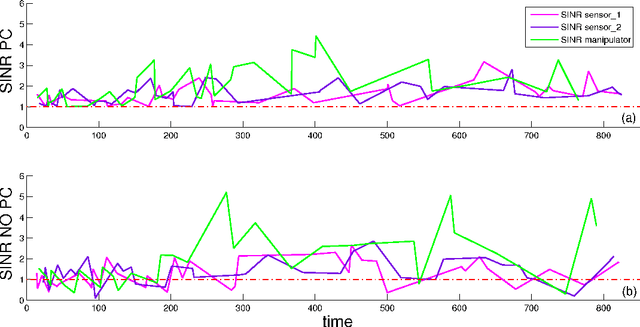
In this paper we consider the problem of coordinating robotic systems with different kinematics, sensing and vision capabilities to achieve certain mission goals. An approach that makes use of a heterogeneous team of agents has several advantages when cost, integration of capabilities, or large search areas need to be considered. A heterogeneous team allows for the robots to become "specialized", accomplish sub-goals more effectively, and thus increase the overall mission efficiency. Two main scenarios are considered in this work. In the first case study we exploit mobility to implement a power control algorithm that increases the Signal to Interference plus Noise Ratio (SINR) among certain members of the network. We create realistic sensing fields and manipulation by using the geometric properties of the sensor field-of-view and the manipulability metric, respectively. The control strategy for each agent of the heterogeneous system is governed by an artificial physics law that considers the different kinematics of the agents and the environment, in a decentralized fashion. Through simulation results we show that the network is able to stay connected at all times and covers the environment well. The second scenario studied in this paper is the biologically-inspired coordination of heterogeneous physical robotic systems. A team of ground rovers, designed to emulate desert seed-harvester ants, explore an experimental area using behaviors fine-tuned in simulation by a genetic algorithm. Our robots coordinate with a base station and collect clusters of resources scattered within the experimental space. We demonstrate experimentally that through coordination with an aerial vehicle, our ant-like ground robots are able to collect resources two times faster than without the use of heterogeneous coordination.
Decentralized identification and control of networks of coupled mobile platforms through adaptive synchronization of chaos
Sep 24, 2013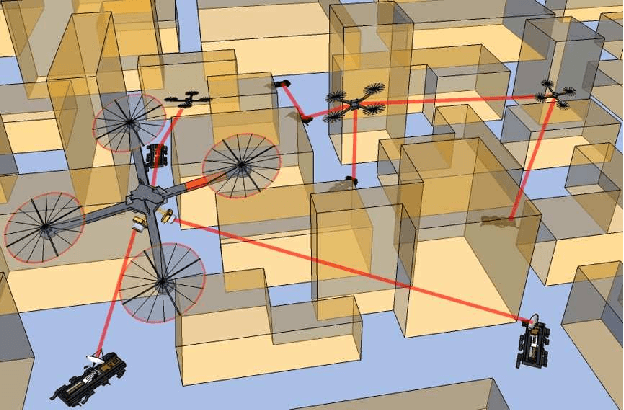
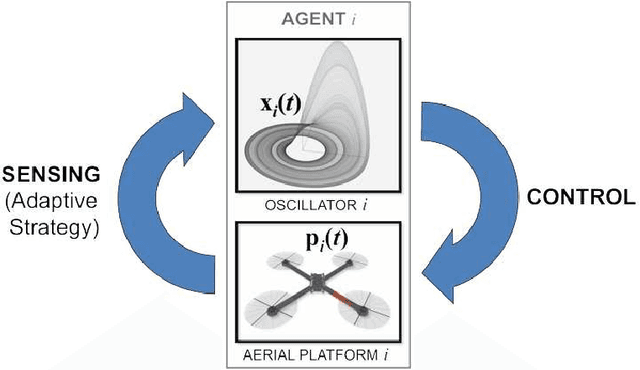
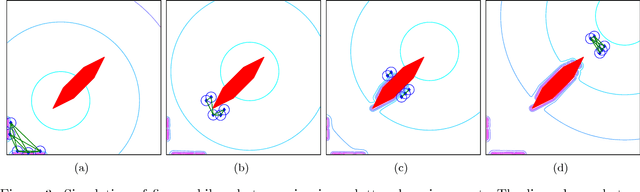
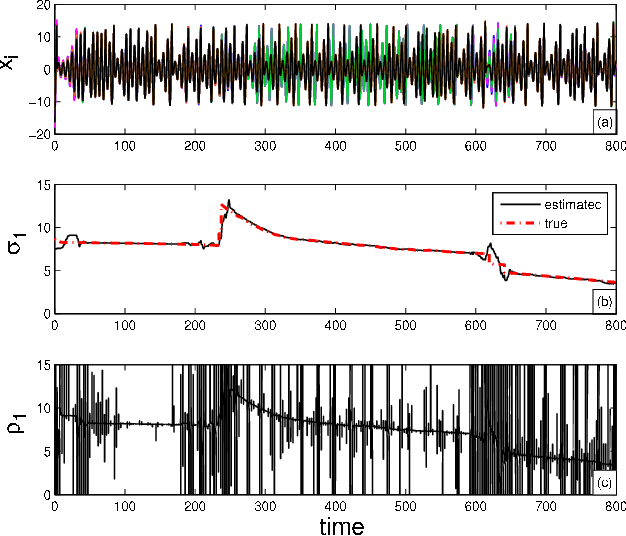
In this paper we propose an application of adaptive synchronization of chaos to detect changes in the topology of a mobile robotic network. We assume that the network may evolve in time due to the relative motion of the mobile robots and due to unknown environmental conditions, such as the presence of obstacles in the environment. We consider that each robotic agent is equipped with a chaotic oscillator whose state is propagated to the other robots through wireless communication, with the goal of synchronizing the oscillators. We introduce an adaptive strategy that each agent independently implements to: (i) estimate the net coupling of all the oscillators in its neighborhood and (ii) synchronize the state of the oscillators onto the same time evolution. We show that by using this strategy, synchronization can be attained and changes in the network topology can be detected. We go one step forward and consider the possibility of using this information to control the mobile network. We show the potential applicability of our technique to the problem of maintaining a formation between a set of mobile platforms, which operate in an inhomogeneous and uncertain environment. We discuss the importance of using chaotic oscillators and validate our methodology by numerical simulations.