 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Uncertainty Estimation Scales with Sampling in Reasoning Models
Mar 19, 2026Uncertainty estimation is critical for deploying reasoning language models, yet remains poorly understood under extended chain-of-thought reasoning. We study parallel sampling as a fully black-box approach using verbalized confidence and self-consistency. Across three reasoning models and 17 tasks spanning mathematics, STEM, and humanities, we characterize how these signals scale. Both self-consistency and verbalized confidence scale in reasoning models, but self-consistency exhibits lower initial discrimination and lags behind verbalized confidence under moderate sampling. Most uncertainty gains, however, arise from signal combination: with just two samples, a hybrid estimator improves AUROC by up to $+12$ on average and already outperforms either signal alone even when scaled to much larger budgets, after which returns diminish. These effects are domain-dependent: in mathematics, the native domain of RLVR-style post-training, reasoning models achieve higher uncertainty quality and exhibit both stronger complementarity and faster scaling than in STEM or humanities.
Aligning the Evaluation of Probabilistic Predictions with Downstream Value
Aug 25, 2025Every prediction is ultimately used in a downstream task. Consequently, evaluating prediction quality is more meaningful when considered in the context of its downstream use. Metrics based solely on predictive performance often diverge from measures of real-world downstream impact. Existing approaches incorporate the downstream view by relying on multiple task-specific metrics, which can be burdensome to analyze, or by formulating cost-sensitive evaluations that require an explicit cost structure, typically assumed to be known a priori. We frame this mismatch as an evaluation alignment problem and propose a data-driven method to learn a proxy evaluation function aligned with the downstream evaluation. Building on the theory of proper scoring rules, we explore transformations of scoring rules that ensure the preservation of propriety. Our approach leverages weighted scoring rules parametrized by a neural network, where weighting is learned to align with the performance in the downstream task. This enables fast and scalable evaluation cycles across tasks where the weighting is complex or unknown a priori. We showcase our framework through synthetic and real-data experiments for regression tasks, demonstrating its potential to bridge the gap between predictive evaluation and downstream utility in modular prediction systems.
Enhancing web traffic attacks identification through ensemble methods and feature selection
Dec 21, 2024



Websites, as essential digital assets, are highly vulnerable to cyberattacks because of their high traffic volume and the significant impact of breaches. This study aims to enhance the identification of web traffic attacks by leveraging machine learning techniques. A methodology was proposed to extract relevant features from HTTP traces using the CSIC2010 v2 dataset, which simulates e-commerce web traffic. Ensemble methods, such as Random Forest and Extreme Gradient Boosting, were employed and compared against baseline classifiers, including k-nearest Neighbor, LASSO, and Support Vector Machines. The results demonstrate that the ensemble methods outperform baseline classifiers by approximately 20% in predictive accuracy, achieving an Area Under the ROC Curve (AUC) of 0.989. Feature selection methods such as Information Gain, LASSO, and Random Forest further enhance the robustness of these models. This study highlights the efficacy of ensemble models in improving attack detection while minimizing performance variability, offering a practical framework for securing web traffic in diverse application contexts.
Improving Calibration by Relating Focal Loss, Temperature Scaling, and Properness
Aug 21, 2024



Proper losses such as cross-entropy incentivize classifiers to produce class probabilities that are well-calibrated on the training data. Due to the generalization gap, these classifiers tend to become overconfident on the test data, mandating calibration methods such as temperature scaling. The focal loss is not proper, but training with it has been shown to often result in classifiers that are better calibrated on test data. Our first contribution is a simple explanation about why focal loss training often leads to better calibration than cross-entropy training. For this, we prove that focal loss can be decomposed into a confidence-raising transformation and a proper loss. This is why focal loss pushes the model to provide under-confident predictions on the training data, resulting in being better calibrated on the test data, due to the generalization gap. Secondly, we reveal a strong connection between temperature scaling and focal loss through its confidence-raising transformation, which we refer to as the focal calibration map. Thirdly, we propose focal temperature scaling - a new post-hoc calibration method combining focal calibration and temperature scaling. Our experiments on three image classification datasets demonstrate that focal temperature scaling outperforms standard temperature scaling.
Cautious Calibration in Binary Classification
Aug 09, 2024Being cautious is crucial for enhancing the trustworthiness of machine learning systems integrated into decision-making pipelines. Although calibrated probabilities help in optimal decision-making, perfect calibration remains unattainable, leading to estimates that fluctuate between under- and overconfidence. This becomes a critical issue in high-risk scenarios, where even occasional overestimation can lead to extreme expected costs. In these scenarios, it is important for each predicted probability to lean towards underconfidence, rather than just achieving an average balance. In this study, we introduce the novel concept of cautious calibration in binary classification. This approach aims to produce probability estimates that are intentionally underconfident for each predicted probability. We highlight the importance of this approach in a high-risk scenario and propose a theoretically grounded method for learning cautious calibration maps. Through experiments, we explore and compare our method to various approaches, including methods originally not devised for cautious calibration but applicable in this context. We show that our approach is the most consistent in providing cautious estimates. Our work establishes a strong baseline for further developments in this novel framework.
Calibrated Perception Uncertainty Across Objects and Regions in Bird's-Eye-View
Nov 08, 2022


In driving scenarios with poor visibility or occlusions, it is important that the autonomous vehicle would take into account all the uncertainties when making driving decisions, including choice of a safe speed. The grid-based perception outputs, such as occupancy grids, and object-based outputs, such as lists of detected objects, must then be accompanied by well-calibrated uncertainty estimates. We highlight limitations in the state-of-the-art and propose a more complete set of uncertainties to be reported, particularly including undetected-object-ahead probabilities. We suggest a novel way to get these probabilistic outputs from bird's-eye-view probabilistic semantic segmentation, in the example of the FIERY model. We demonstrate that the obtained probabilities are not calibrated out-of-the-box and propose methods to achieve well-calibrated uncertainties.
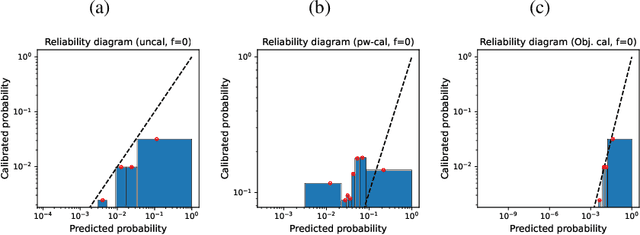
On the Usefulness of the Fit-on-the-Test View on Evaluating Calibration of Classifiers
Mar 21, 2022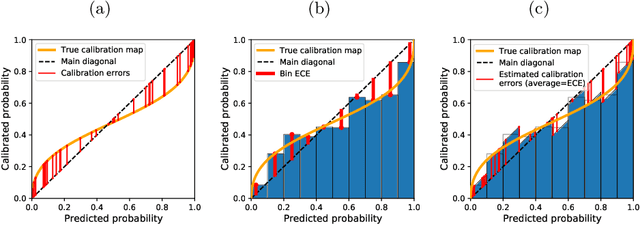

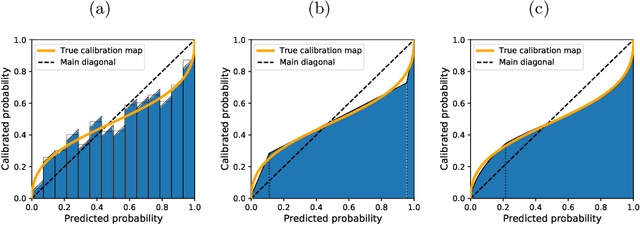
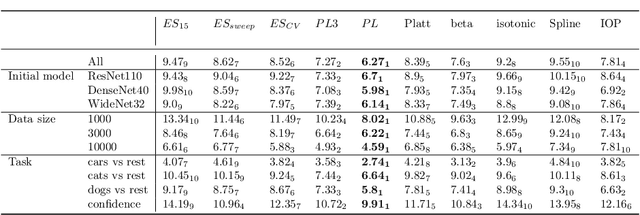
Every uncalibrated classifier has a corresponding true calibration map that calibrates its confidence. Deviations of this idealistic map from the identity map reveal miscalibration. Such calibration errors can be reduced with many post-hoc calibration methods which fit some family of calibration maps on a validation dataset. In contrast, evaluation of calibration with the expected calibration error (ECE) on the test set does not explicitly involve fitting. However, as we demonstrate, ECE can still be viewed as if fitting a family of functions on the test data. This motivates the fit-on-the-test view on evaluation: first, approximate a calibration map on the test data, and second, quantify its distance from the identity. Exploiting this view allows us to unlock missed opportunities: (1) use the plethora of post-hoc calibration methods for evaluating calibration; (2) tune the number of bins in ECE with cross-validation. Furthermore, we introduce: (3) benchmarking on pseudo-real data where the true calibration map can be estimated very precisely; and (4) novel calibration and evaluation methods using new calibration map families PL and PL3.
Ethical and Fairness Implications of Model Multiplicity
Mar 14, 2022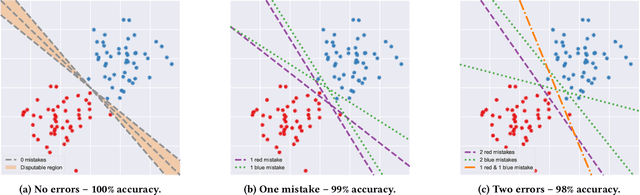
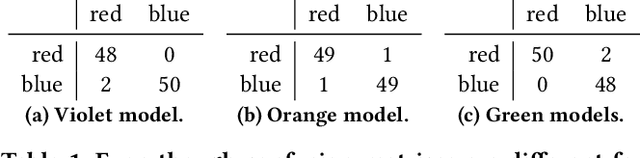
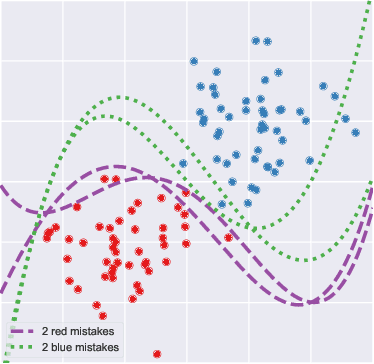

While predictive models are a purely technological feat, they may operate in a social context in which benign engineering choices entail unexpected real-life consequences. Fairness -- pertaining both to individuals and groups -- is one of such considerations; it surfaces when data capture protected characteristics of people who may be discriminated upon these attributes. This notion has predominantly been studied for a fixed predictive model, sometimes under different classification thresholds, striving to identify and eradicate its undesirable behaviour. Here we backtrack on this assumption and explore a novel definition of fairness where individuals can be harmed when one predictor is chosen ad hoc from a group of equally well performing models, i.e., in view of model multiplicity. Since a person may be classified differently across models that are otherwise considered equivalent, this individual could argue for a model with a more favourable outcome, possibly causing others to be adversely affected. We introduce this scenario with a two-dimensional example based on linear classification; then investigate its analytical properties in a broader context; and finally present experimental results on data sets popular in fairness studies. Our findings suggest that such unfairness can be found in real-life situations and may be difficult to mitigate with technical measures alone, as doing so degrades certain metrics of predictive performance.
Classifier Calibration: How to assess and improve predicted class probabilities: a survey
Dec 20, 2021
This paper provides both an introduction to and a detailed overview of the principles and practice of classifier calibration. A well-calibrated classifier correctly quantifies the level of uncertainty or confidence associated with its instance-wise predictions. This is essential for critical applications, optimal decision making, cost-sensitive classification, and for some types of context change. Calibration research has a rich history which predates the birth of machine learning as an academic field by decades. However, a recent increase in the interest on calibration has led to new methods and the extension from binary to the multiclass setting. The space of options and issues to consider is large, and navigating it requires the right set of concepts and tools. We provide both introductory material and up-to-date technical details of the main concepts and methods, including proper scoring rules and other evaluation metrics, visualisation approaches, a comprehensive account of post-hoc calibration methods for binary and multiclass classification, and several advanced topics.
Shift Happens: Adjusting Classifiers
Nov 03, 2021
Minimizing expected loss measured by a proper scoring rule, such as Brier score or log-loss (cross-entropy), is a common objective while training a probabilistic classifier. If the data have experienced dataset shift where the class distributions change post-training, then often the model's performance will decrease, over-estimating the probabilities of some classes while under-estimating the others on average. We propose unbounded and bounded general adjustment (UGA and BGA) methods that transform all predictions to (re-)equalize the average prediction and the class distribution. These methods act differently depending on which proper scoring rule is to be minimized, and we have a theoretical guarantee of reducing loss on test data, if the exact class distribution is known. We also demonstrate experimentally that, when in practice the class distribution is known only approximately, there is often still a reduction in loss depending on the amount of shift and the precision to which the class distribution is known.
* ECML PKDD 2019 conference paper, 16 pages