 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTendon-driven Underactuated Hand Design via Optimization of Mechanically Realizable Manifolds in Posture and Torque Spaces
May 27, 2019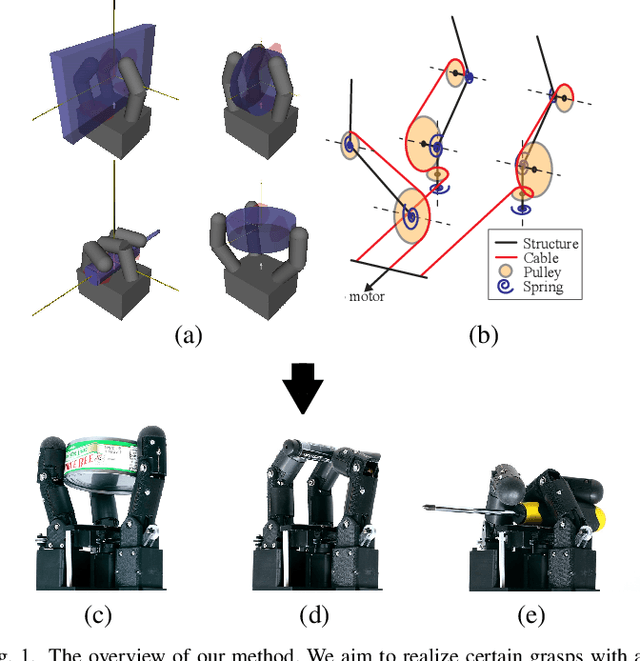
Grasp synergies represent a useful idea to reduce grasping complexity without compromising versatility. Synergies describe coordination patterns between joints, either in terms of position (joint angles) or force (joint torques). In both of these cases, a grasp synergy can be represented as a low-dimensional manifold lying in the high-dimensional joint posture or torque space. In this paper, we use the term Mechanically Realizable Manifolds to refer to the subset of such manifolds (in either posture or torque space) that can be achieved via mechanical coupling of the joints in underactuated hands. We present a method to optimize the design parameters of an underactuated hand in order to shape the Mechanically Realizable Manifolds to satisfy a pre-defined set of desired grasps. Our method guarantees that the resulting synergies can be implemented in a physical underactuated hand, and will enable the resulting hand to both reach the desired grasp postures and achieve quasistatic equilibrium while loading the grasps. We demonstrate this method on three concrete design examples derived from a real use case, and evaluate and compare their performance in practice.