 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAre Large Language Models the New Interface for Data Pipelines?
Jun 06, 2024
A Language Model is a term that encompasses various types of models designed to understand and generate human communication. Large Language Models (LLMs) have gained significant attention due to their ability to process text with human-like fluency and coherence, making them valuable for a wide range of data-related tasks fashioned as pipelines. The capabilities of LLMs in natural language understanding and generation, combined with their scalability, versatility, and state-of-the-art performance, enable innovative applications across various AI-related fields, including eXplainable Artificial Intelligence (XAI), Automated Machine Learning (AutoML), and Knowledge Graphs (KG). Furthermore, we believe these models can extract valuable insights and make data-driven decisions at scale, a practice commonly referred to as Big Data Analytics (BDA). In this position paper, we provide some discussions in the direction of unlocking synergies among these technologies, which can lead to more powerful and intelligent AI solutions, driving improvements in data pipelines across a wide range of applications and domains integrating humans, computers, and knowledge.
E2ENet: Dynamic Sparse Feature Fusion for Accurate and Efficient 3D Medical Image Segmentation
Dec 07, 2023



Deep neural networks have evolved as the leading approach in 3D medical image segmentation due to their outstanding performance. However, the ever-increasing model size and computation cost of deep neural networks have become the primary barrier to deploying them on real-world resource-limited hardware. In pursuit of improving performance and efficiency, we propose a 3D medical image segmentation model, named Efficient to Efficient Network (E2ENet), incorporating two parametrically and computationally efficient designs. i. Dynamic sparse feature fusion (DSFF) mechanism: it adaptively learns to fuse informative multi-scale features while reducing redundancy. ii. Restricted depth-shift in 3D convolution: it leverages the 3D spatial information while keeping the model and computational complexity as 2D-based methods. We conduct extensive experiments on BTCV, AMOS-CT and Brain Tumor Segmentation Challenge, demonstrating that E2ENet consistently achieves a superior trade-off between accuracy and efficiency than prior arts across various resource constraints. E2ENet achieves comparable accuracy on the large-scale challenge AMOS-CT, while saving over 68\% parameter count and 29\% FLOPs in the inference phase, compared with the previous best-performing method. Our code has been made available at: https://github.com/boqian333/E2ENet-Medical.
Short Term Prediction of Parking Area states Using Real Time Data and Machine Learning Techniques
Nov 29, 2019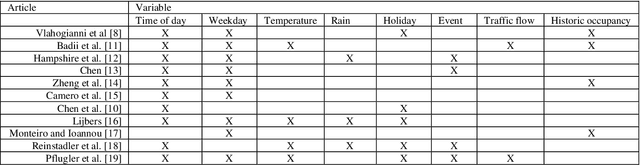
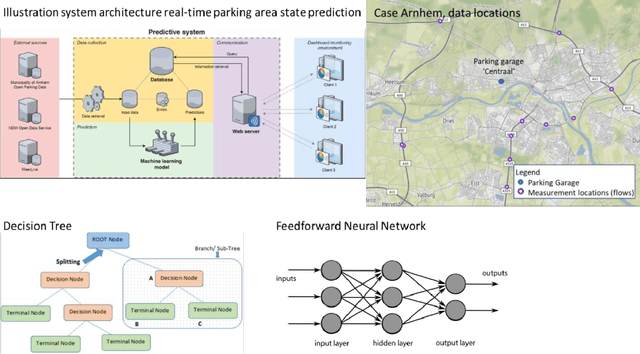
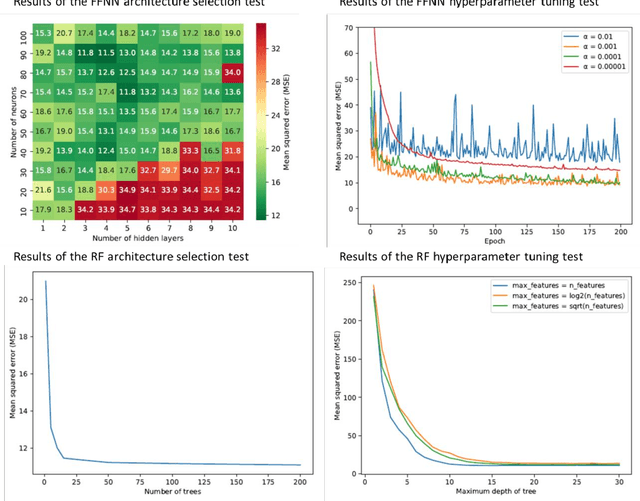
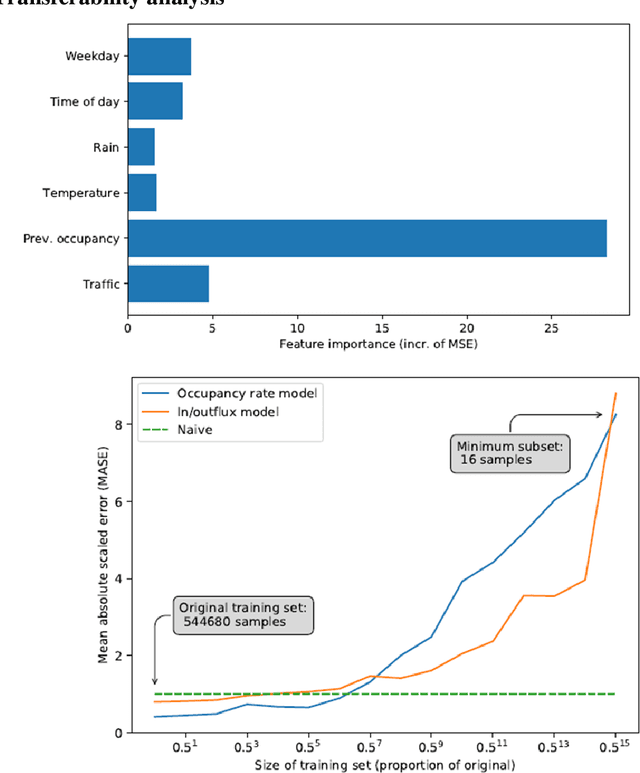
Public road authorities and private mobility service providers need information derived from the current and predicted traffic states to act upon the daily urban system and its spatial and temporal dynamics. In this research, a real-time parking area state (occupancy, in- and outflux) prediction model (up to 60 minutes ahead) has been developed using publicly available historic and real time data sources. Based on a case study in a real-life scenario in the city of Arnhem, a Neural Network-based approach outperforms a Random Forest-based one on all assessed performance measures, although the differences are small. Both are outperforming a naive seasonal random walk model. Although the performance degrades with increasing prediction horizon, the model shows a performance gain of over 150% at a prediction horizon of 60 minutes compared with the naive model. Furthermore, it is shown that predicting the in- and outflux is a far more difficult task (i.e. performance gains of 30%) which needs more training data, not based exclusively on occupancy rate. However, the performance of predicting in- and outflux is less sensitive to the prediction horizon. In addition, it is shown that real-time information of current occupancy rate is the independent variable with the highest contribution to the performance, although time, traffic flow and weather variables also deliver a significant contribution. During real-time deployment, the model performs three times better than the naive model on average. As a result, it can provide valuable information for proactive traffic management as well as mobility service providers.