 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Task-Parameterised Movement Learning Generalisation with Frame-Weighted Trajectory Generation
Mar 04, 2019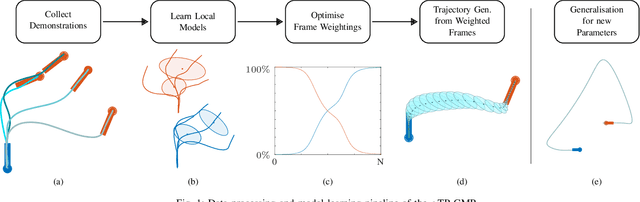
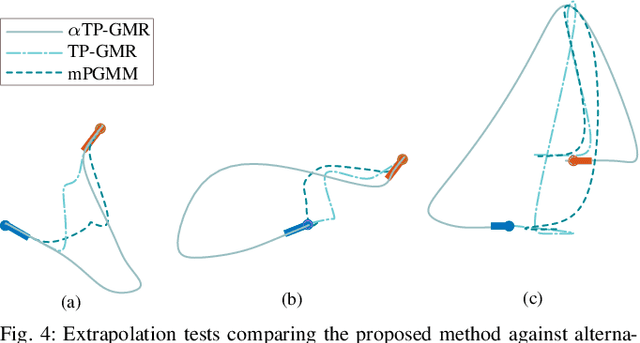
Learning from Demonstration depends on a robot learner generalising its learned model to unseen conditions, as it is not feasible for a person to provide a demonstration set that accounts for all possible variations in non-trivial tasks. While there are many learning methods that can handle interpolation of observed data effectively, extrapolation from observed data offers a much greater challenge. To address this problem of generalisation, this paper proposes a modified Task-Parameterised Gaussian Mixture Regression method that considers the relevance of task parameters during trajectory generation, as determined by variance in the data. The benefits of the proposed method are first explored using a simulated reaching task data set. Here it is shown that the proposed method offers far-reaching, low-error extrapolation abilities that are different in nature to existing learning methods. Data collected from novice users for a real-world manipulation task is then considered, where it is shown that the proposed method is able to effectively reduce grasping performance errors by ${\sim30\%}$ and extrapolate to unseen grasp targets under real-world conditions. These results indicate the proposed method serves to benefit novice users by placing less reliance on the user to provide high quality demonstration data sets.
Energy regenerative damping in variable impedance actuators for long-term robotic deployment
Oct 26, 2018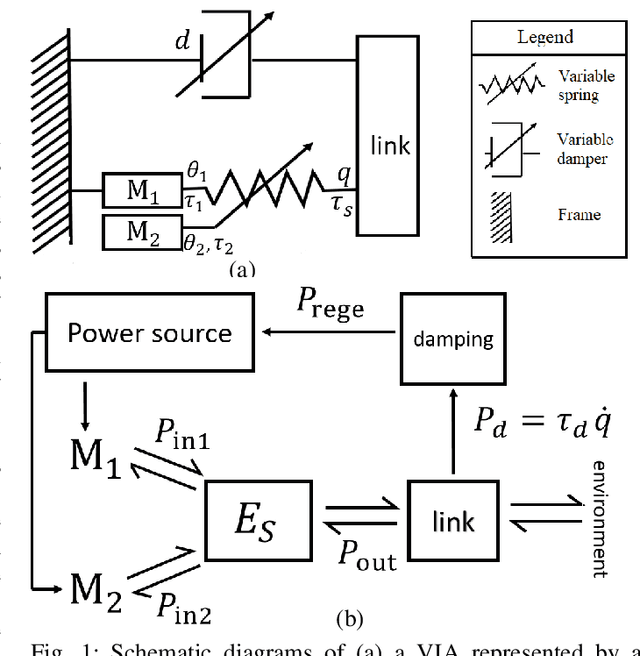
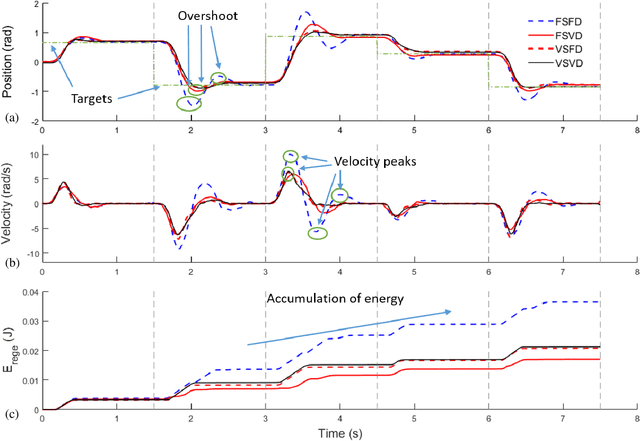

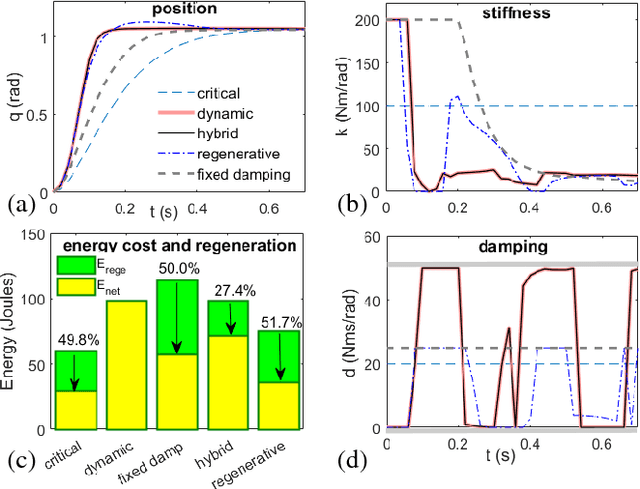
Energy efficiency is a crucial issue towards longterm deployment of compliant robots in the real world. In the context of variable impedance actuators (VIAs), the main focus has been on improving energy efficiency through reduction of energy consumption. However, the harvesting of dissipated energy in such systems remains under-explored. This study proposes a novel variable damping module design enabling energy regeneration in VIAs by exploiting the regenerative braking effect of DC motors. The proposed damping module uses four switches to combine regenerative and dynamic braking, in a hybrid approach that enables energy regeneration without reduction in the range of damping achievable. A physical implementation on a simple VIA mechanism is presented in which the regenerative properties of the proposed module are characterised and compared against theoretical predictions. To investigate the role of variable regenerative damping in terms of energy efficiency of longterm operation, experiments are reported in which the VIA equipped with the proposed damping module performs sequential reaching to a series of stochastic targets. The results indicate that the combination of variable stiffness and variable regenerative damping is preferable to achieve the optimal trade-off between task performance and energy efficiency. Use of the latter results in a 25% performance improvement on overall performance metrics (incorporating reaching accuracy, settling time, energy consumption and regeneration), over comparable schemes where either stiffness or damping are fixed.
A Hybrid Dynamic-regenerative Damping Scheme for Energy Regeneration in Variable Impedance Actuators
Aug 08, 2018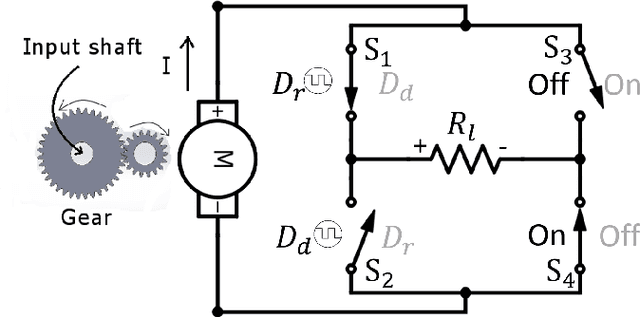
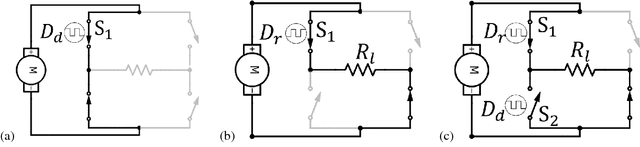
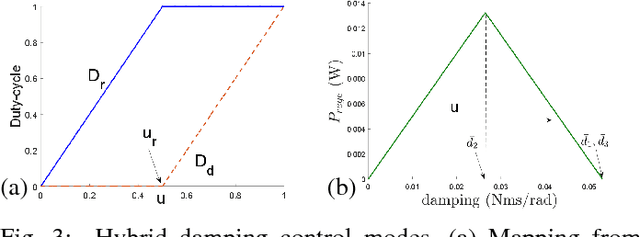
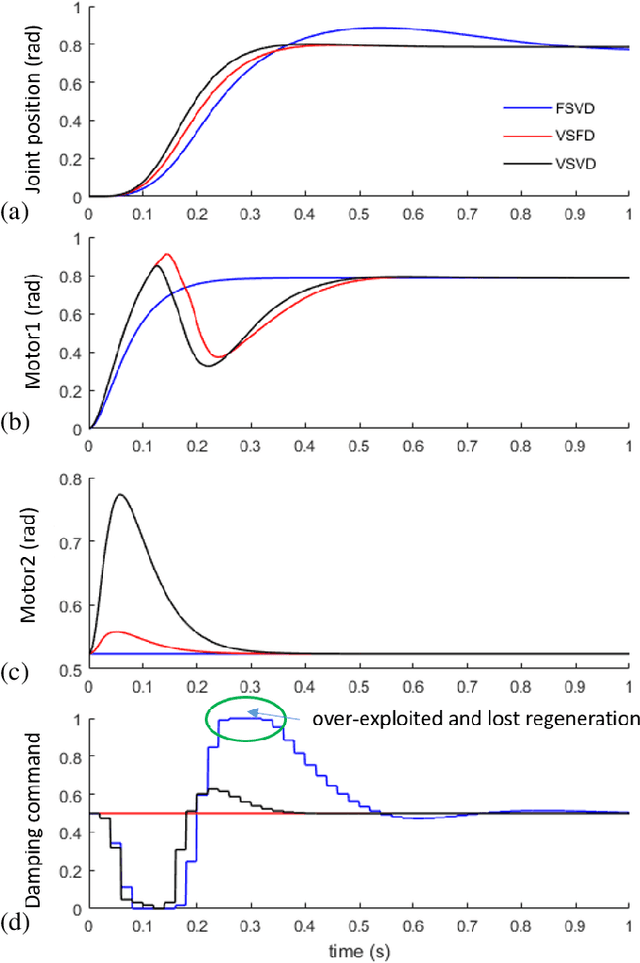
Increasing research efforts have been made to improve the energy efficiency of variable impedance actuators (VIAs) through reduction of energy consumption. However, the harvesting of dissipated energy in such systems remains underexplored. This study proposes a novel variable damping module design enabling energy regeneration in VIAs by exploiting the regenerative braking effect of DC motors. The proposed damping module uses four switches to combine regenerative and dynamic braking, in a hybrid approach that enables energy regeneration without reduction in the range of damping achievable. Numerical simulations and a physical experiment are presented in which the proposed module shows an optimal trade-off between task performance and energy efficiency.
A Library for Constraint Consistent Learning
Jul 12, 2018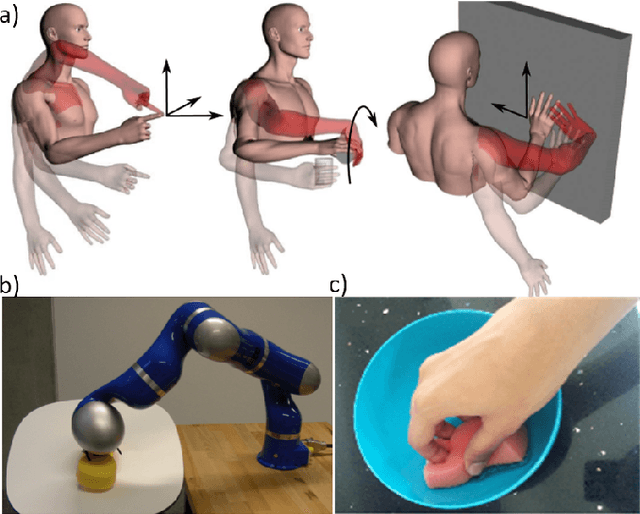
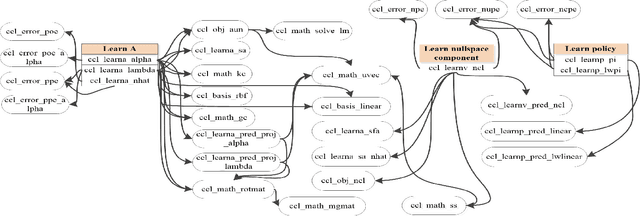
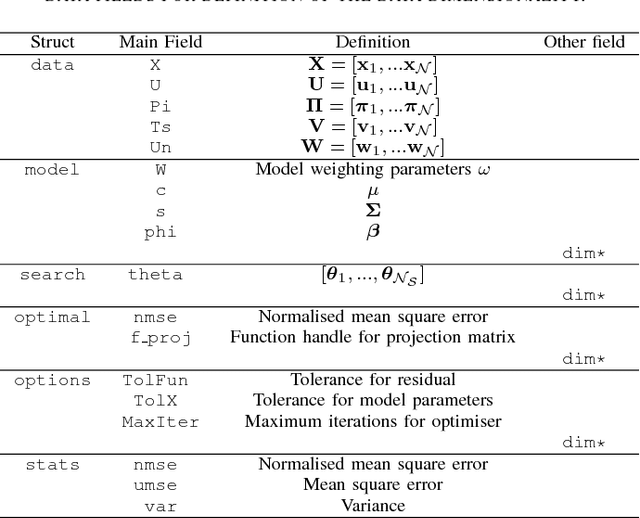
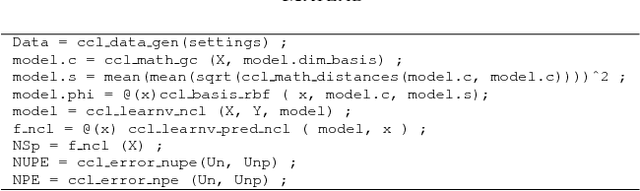
This paper introduces the first, open source software library for Constraint Consistent Learning (CCL). It implements a family of data-driven methods that are capable of (i) learning state-independent and -dependent constraints, (ii) decomposing the behaviour of redundant systems into task and null-space parts, and (iii) uncovering the underlying null space control policy. It is a powerful tool to analyse and decompose many everyday tasks, such as wiping, reaching and drawing. The library also includes several tutorials that demonstrate its use in a systematic way. This paper documents the implementation of the library, tutorials and associated helper methods. The software is made freely available to the community, to enable code reuse and allow users to gain indepth experience in learning constraints and underlying control policies in the context of redundant robotic systems.
Learning Null Space Projections in Operational Space Formulation
Jul 26, 2016

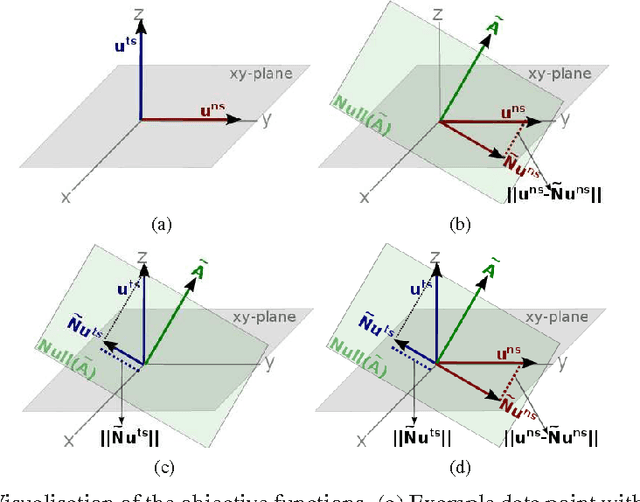
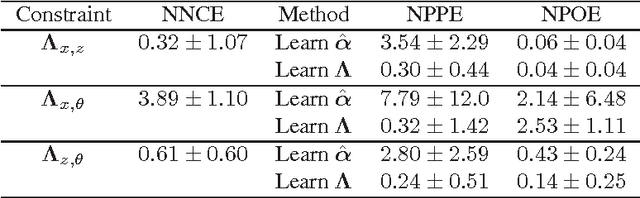
In recent years, a number of tools have become available that recover the underlying control policy from constrained movements. However, few have explicitly considered learning the constraints of the motion and ways to cope with unknown environment. In this paper, we consider learning the null space projection matrix of a kinematically constrained system in the absence of any prior knowledge either on the underlying policy, the geometry, or dimensionality of the constraints. Our evaluations have demonstrated the effectiveness of the proposed approach on problems of differing dimensionality, and with different degrees of non-linearity.