 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot-Assisted Navigation for Visually Impaired through Adaptive Impedance and Path Planning
Oct 23, 2023



This paper presents a framework to navigate visually impaired people through unfamiliar environments by means of a mobile manipulator. The Human-Robot system consists of three key components: a mobile base, a robotic arm, and the human subject who gets guided by the robotic arm via physically coupling their hand with the cobot's end-effector. These components, receiving a goal from the user, traverse a collision-free set of waypoints in a coordinated manner, while avoiding static and dynamic obstacles through an obstacle avoidance unit and a novel human guidance planner. With this aim, we also present a legs tracking algorithm that utilizes 2D LiDAR sensors integrated into the mobile base to monitor the human pose. Additionally, we introduce an adaptive pulling planner responsible for guiding the individual back to the intended path if they veer off course. This is achieved by establishing a target arm end-effector position and dynamically adjusting the impedance parameters in real-time through a impedance tuning unit. To validate the framework we present a set of experiments both in laboratory settings with 12 healthy blindfolded subjects and a proof-of-concept demonstration in a real-world scenario.
The Bridge between Xsens Motion-Capture and Robot Operating System : Enabling Robots with Online 3D Human Motion Tracking
Jun 30, 2023



This document introduces the bridge between the leading inertial motion-capture systems for 3D human tracking and the most used robotics software framework. 3D kinematic data provided by Xsens are translated into ROS messages to make them usable by robots and a Unified Robotics Description Format (URDF) model of the human kinematics is generated, which can be run and displayed in ROS 3D visualizer, RViz. The code to implement the to-ROS-bridge is a ROS package called xsens_mvn_ros and is available on GitHub at https://github.com/hrii-iit/xsens_mvn_ros The main documentation can be found at https://hrii-iit.github.io/xsens_mvn_ros/index.html
Markerless 3D human pose tracking through multiple cameras and AI: Enabling high accuracy, robustness, and real-time performance
Mar 31, 2023



Tracking 3D human motion in real-time is crucial for numerous applications across many fields. Traditional approaches involve attaching artificial fiducial objects or sensors to the body, limiting their usability and comfort-of-use and consequently narrowing their application fields. Recent advances in Artificial Intelligence (AI) have allowed for markerless solutions. However, most of these methods operate in 2D, while those providing 3D solutions compromise accuracy and real-time performance. To address this challenge and unlock the potential of visual pose estimation methods in real-world scenarios, we propose a markerless framework that combines multi-camera views and 2D AI-based pose estimation methods to track 3D human motion. Our approach integrates a Weighted Least Square (WLS) algorithm that computes 3D human motion from multiple 2D pose estimations provided by an AI-driven method. The method is integrated within the Open-VICO framework allowing simulation and real-world execution. Several experiments have been conducted, which have shown high accuracy and real-time performance, demonstrating the high level of readiness for real-world applications and the potential to revolutionize human motion capture.
ErgoTac-Belt: Anticipatory Vibrotactile Feedback to Lead \\Centre of Pressure during Walking
Jul 08, 2022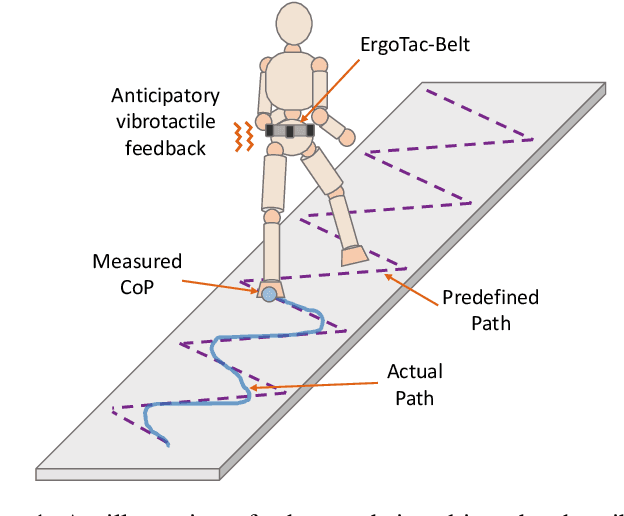
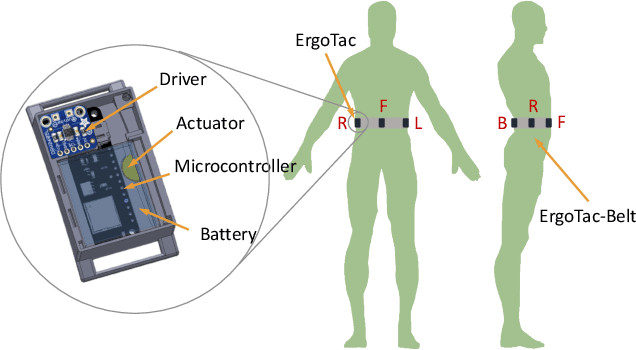
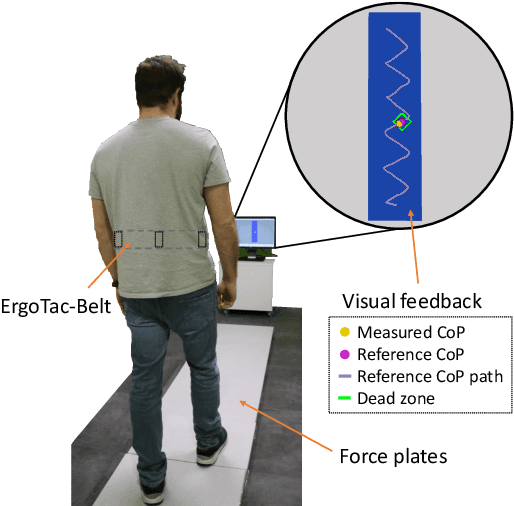
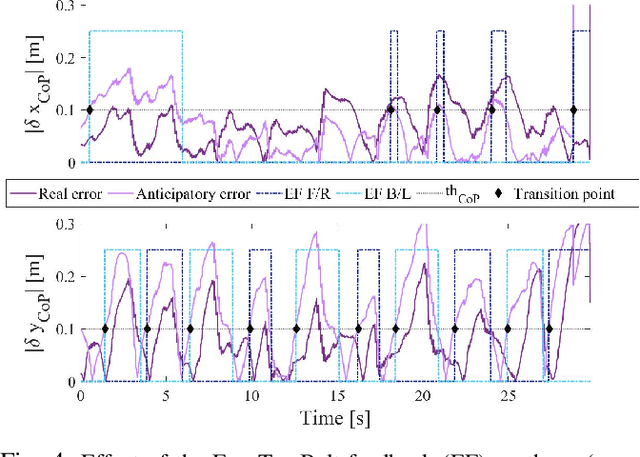
Balance and gait disorders are the second leading cause of falls, which, along with consequent injuries, are reported as major public health problems all over the world. For patients who do not require mechanical support, vibrotactile feedback interfaces have proven to be a successful approach in restoring balance. Most of the existing strategies assess trunk or head tilt and velocity or plantar forces, and are limited to the analysis of stance. On the other hand, central to balance control is the need to maintain the body's centre of pressure (CoP) within feasible limits of the support polygon (SP), as in standing, or on track to a new SP, as in walking. Hence, this paper proposes an exploratory study to investigate whether vibrotactile feedback can be employed to lead human CoP during walking. The ErgoTac-Belt vibrotactile device is introduced to instruct the users about the direction to take, both in the antero-posterior and medio-lateral axes. An anticipatory strategy is adopted here, to give the users enough time to react to the stimuli. Experiments on ten healthy subjects demonstrated the promising capability of the proposed device to guide the users' CoP along a predefined reference path, with similar performance as the one achieved with visual feedback. Future developments will investigate our strategy and device in guiding the CoP of elderly or individuals with vestibular impairments, who may not be aware of or, able to figure out, a safe and ergonomic CoP path.
Open-VICO: An Open-Source Gazebo Toolkit for Multi-Camera-based Skeleton Tracking in Human-Robot Collaboration
Mar 28, 2022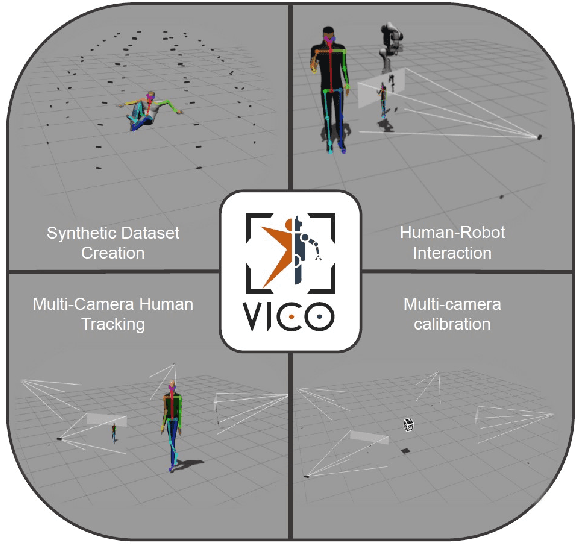
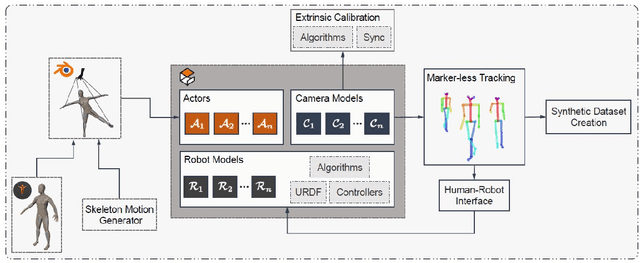
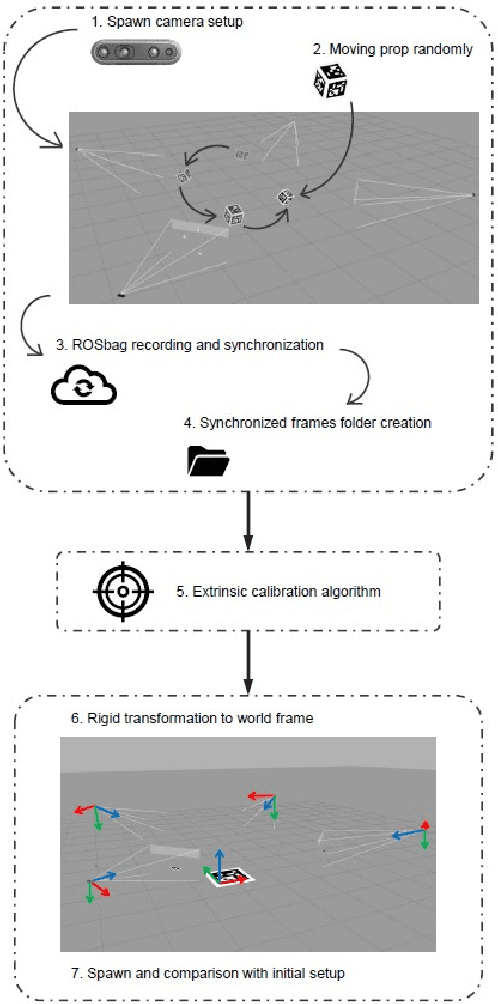
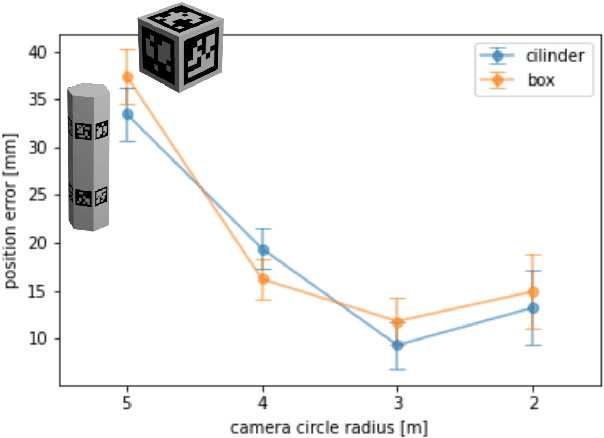
Simulation tools are essential for robotics research, especially for those domains in which safety is crucial, such as Human-Robot Collaboration (HRC). However, it is challenging to simulate human behaviors, and existing robotics simulators do not integrate functional human models. This work presents Open-VICO~\footnote{\url{https://gitlab.iit.it/hrii-public/open-vico}}, an open-source toolkit to integrate virtual human models in Gazebo focusing on vision-based human tracking. In particular, Open-VICO allows to combine in the same simulation environment realistic human kinematic models, multi-camera vision setups, and human-tracking techniques along with numerous robot and sensor models thanks to Gazebo. The possibility to incorporate pre-recorded human skeleton motion with Motion Capture systems broadens the landscape of human performance behavioral analysis within Human-Robot Interaction (HRI) settings. To describe the functionalities and stress the potential of the toolkit four specific examples, chosen among relevant literature challenges in the field, are developed using our simulation utils: i) 3D multi-RGB-D camera calibration in simulation, ii) creation of a synthetic human skeleton tracking dataset based on OpenPose, iii) multi-camera scenario for human skeleton tracking in simulation, and iv) a human-robot interaction example. The key of this work is to create a straightforward pipeline which we hope will motivate research on new vision-based algorithms and methodologies for lightweight human-tracking and flexible human-robot applications.