 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Human-Machine Interaction by Combining Proximity Sensing with Global Perception
Oct 16, 2019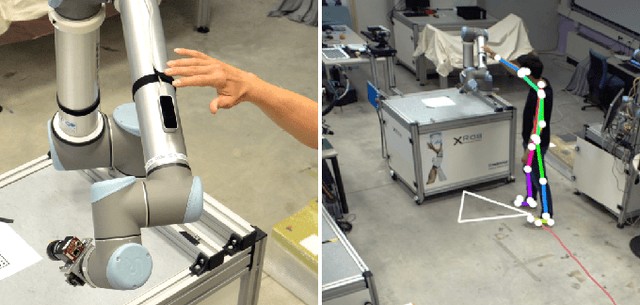
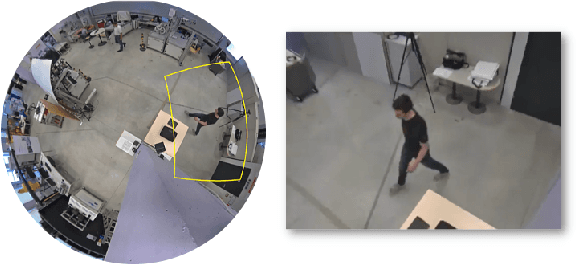
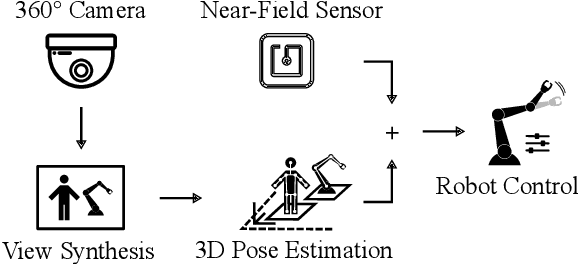
The raise of collaborative robotics has led to wide range of sensor technologies to detect human-machine interactions: at short distances, proximity sensors detect nontactile gestures virtually occlusion-free, while at medium distances, active depth sensors are frequently used to infer human intentions. We describe an optical system for large workspaces to capture human pose based on a single panoramic color camera. Despite the two-dimensional input, our system is able to predict metric 3D pose information over larger field of views than would be possible with active depth measurement cameras. We merge posture context with proximity perception to reduce occlusions and improve accuracy at long distances. We demonstrate the capabilities of our system in two use cases involving multiple humans and robots.
Metric Pose Estimation for Human-Machine Interaction Using Monocular Vision
Oct 08, 2019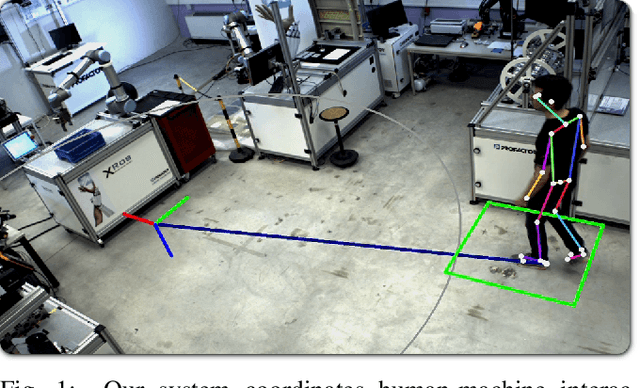
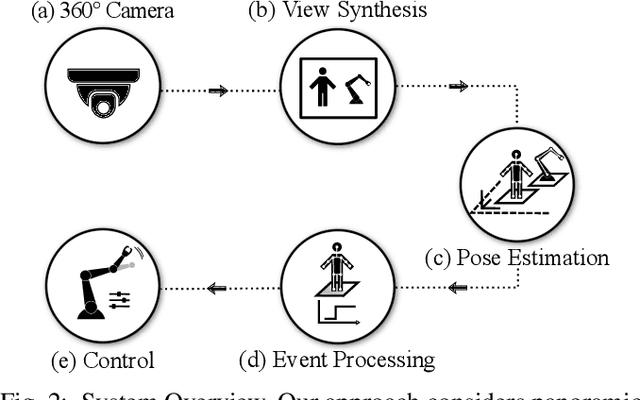
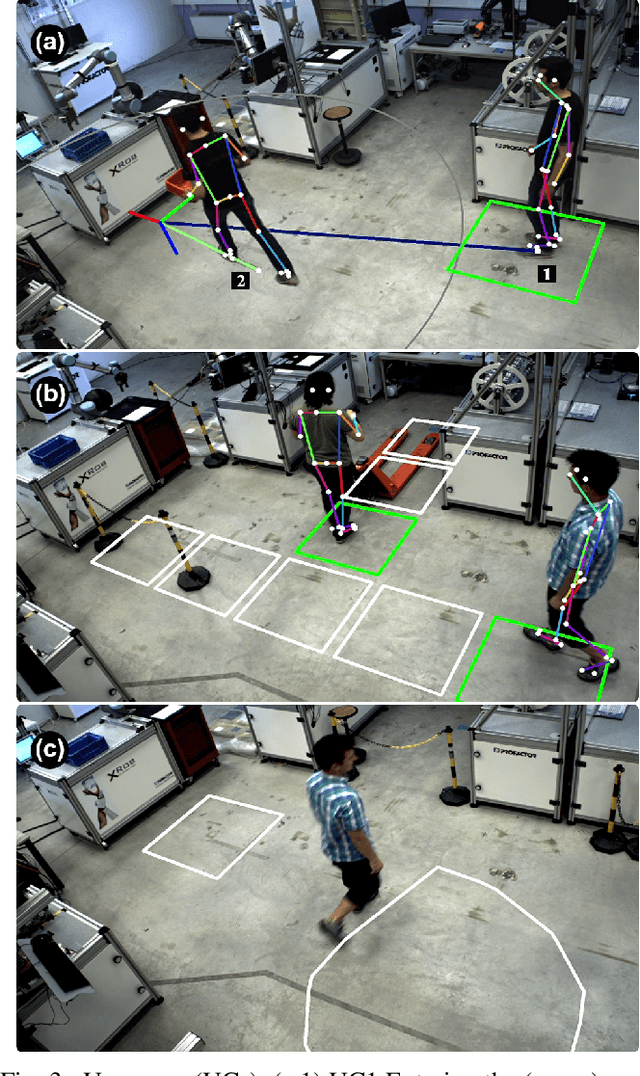
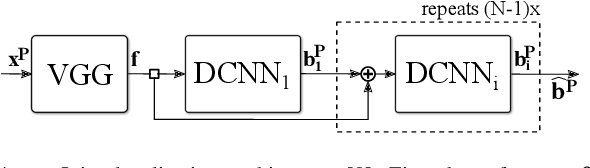
The rapid growth of collaborative robotics in production requires new automation technologies that take human and machine equally into account. In this work, we describe a monocular camera based system to detect human-machine interactions from a bird's-eye perspective. Our system predicts poses of humans and robots from a single wide-angle color image. Even though our approach works on 2D color input, we lift the majority of detections to a metric 3D space. Our system merges pose information with predefined virtual sensors to coordinate human-machine interactions. We demonstrate the advantages of our system in three use cases.