 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCartesian dictionary-based native T1 and T2 mapping of the myocardium
Oct 05, 2021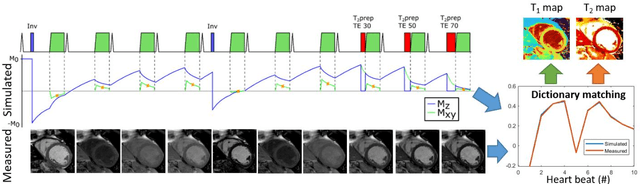
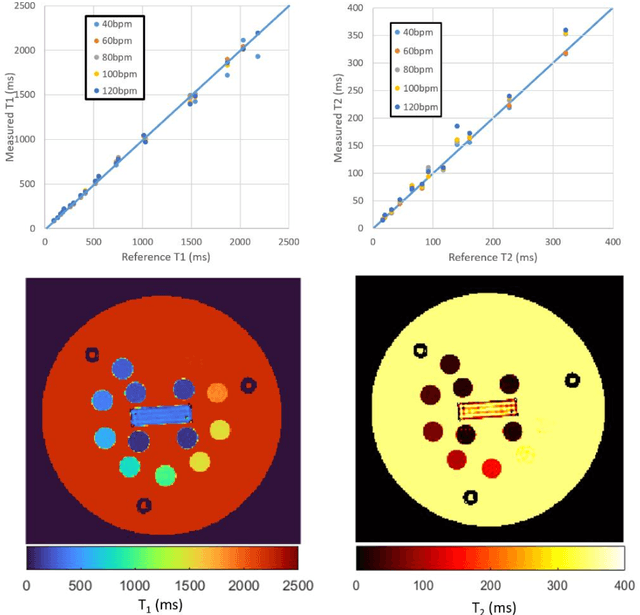
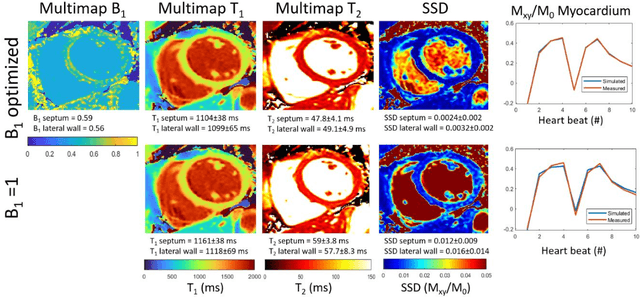
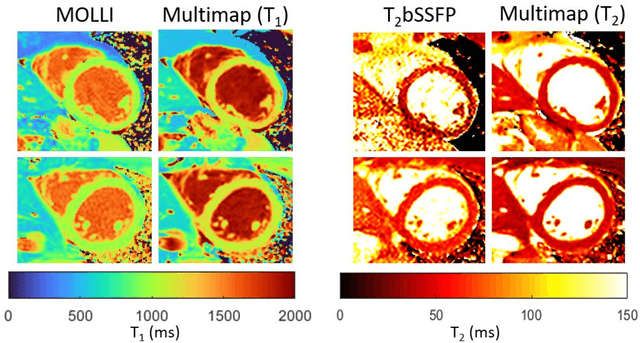
Purpose: To implement and evaluate a new dictionary-based technique for native myocardial T1 and T2 mapping using Cartesian sampling. Methods: The proposed technique (Multimapping) consisted of single-shot Cartesian image acquisitions in 10 consecutive cardiac cycles, with inversion pulses in cycle 1 and 5, and T2 preparation (TE: 30ms, 50ms and 70ms) in cycles 8-10. Multimapping was simulated for different T1 and T2, where entries corresponding to the k-space centers were matched to acquired data. Experiments were performed in a phantom, 12 healthy subjects and three patients with cardiovascular disease. Results: Multimapping phantom measurements showed good agreement with reference values for both T1 and T2, with no discernable heart-rate dependency for T1 and T2 within the range of myocardium. In vivo mean T1 in healthy subjects was significantly higher using Multimapping (T1=1112+/-15ms) compared to the reference (T1=992+/-26ms) (p<0.01). Mean Multimapping T2 (47.3+/-1.4ms) and T2 spatial variability (6.0+/-1.1ms) was significantly lower compared to the reference (T2=54.9+/-2.4ms, p<0.001; spatial variability=8.6+/-2.2ms, p<0.01). Increased T1 and T2 was detected in all patients using Multimapping. Conclusions: Multimapping allows myocardial T1 and T2 mapping simultaneously, demonstrating promising in vivo image quality and parameter quantification results.
Mechanically Powered Motion Imaging Phantoms: Proof of Concept
May 17, 2019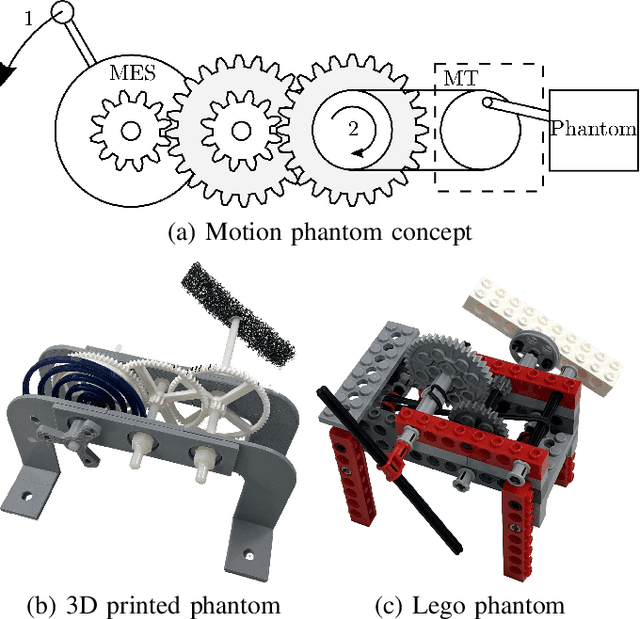
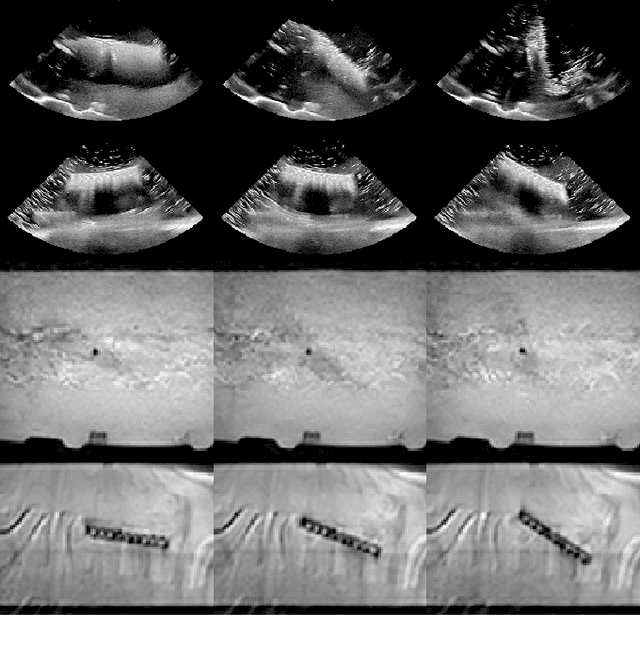
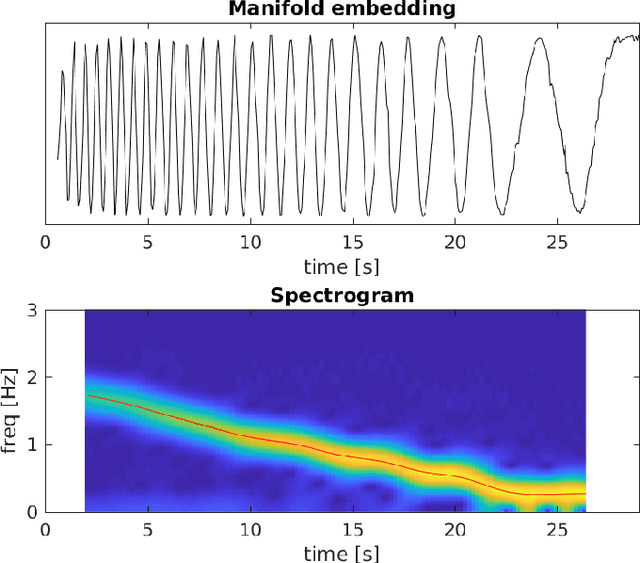
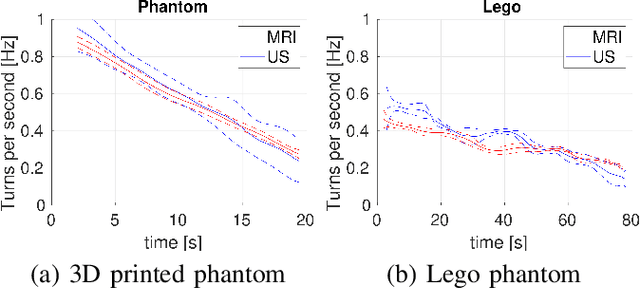
Motion imaging phantoms are expensive, bulky and difficult to transport and set-up. The purpose of this paper is to demonstrate a simple approach to the design of multi-modality motion imaging phantoms that use mechanically stored energy to produce motion. We propose two phantom designs that use mainsprings and elastic bands to store energy. A rectangular piece was attached to an axle at the end of the transmission chain of each phantom, and underwent a rotary motion upon release of the mechanical motor. The phantoms were imaged with MRI and US, and the image sequences were embedded in a 1D non linear manifold (Laplacian Eigenmap) and the spectrogram of the embedding was used to derive the angular velocity over time. The derived velocities were consistent and reproducible within a small error. The proposed motion phantom concept showed great potential for the construction of simple and affordable motion phantoms