 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNEMO-4-PAYPAL: Leveraging NVIDIA's Nemo Framework for empowering PayPal's Commerce Agent
Dec 25, 2025We present the development and optimization of PayPal's Commerce Agent, powered by NEMO-4-PAYPAL, a multi-agent system designed to revolutionize agentic commerce on the PayPal platform. Through our strategic partnership with NVIDIA, we leveraged the NeMo Framework for LLM model fine-tuning to enhance agent performance. Specifically, we optimized the Search and Discovery agent by replacing our base model with a fine-tuned Nemotron small language model (SLM). We conducted comprehensive experiments using the llama3.1-nemotron-nano-8B-v1 architecture, training LoRA-based models through systematic hyperparameter sweeps across learning rates, optimizers (Adam, AdamW), cosine annealing schedules, and LoRA ranks. Our contributions include: (1) the first application of NVIDIA's NeMo Framework to commerce-specific agent optimization, (2) LLM powered fine-tuning strategy for retrieval-focused commerce tasks, (3) demonstration of significant improvements in latency and cost while maintaining agent quality, and (4) a scalable framework for multi-agent system optimization in production e-commerce environments. Our results demonstrate that the fine-tuned Nemotron SLM effectively resolves the key performance issue in the retrieval component, which represents over 50\% of total agent response time, while maintaining or enhancing overall system performance.
A Grassmannian Graph Approach to Affine Invariant Feature Matching
Feb 04, 2016

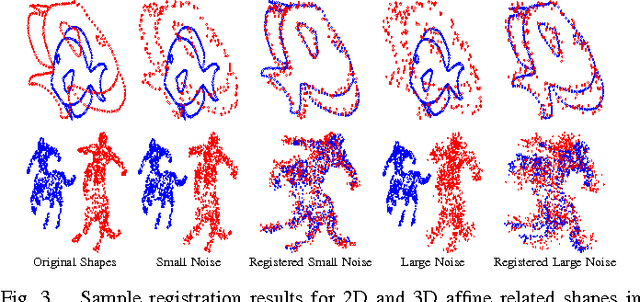
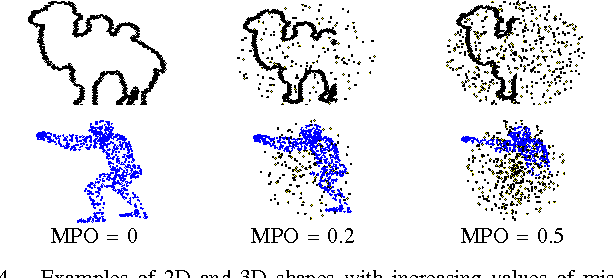
In this work, we present a novel and practical approach to address one of the longstanding problems in computer vision: 2D and 3D affine invariant feature matching. Our Grassmannian Graph (GrassGraph) framework employs a two stage procedure that is capable of robustly recovering correspondences between two unorganized, affinely related feature (point) sets. The first stage maps the feature sets to an affine invariant Grassmannian representation, where the features are mapped into the same subspace. It turns out that coordinate representations extracted from the Grassmannian differ by an arbitrary orthonormal matrix. In the second stage, by approximating the Laplace-Beltrami operator (LBO) on these coordinates, this extra orthonormal factor is nullified, providing true affine-invariant coordinates which we then utilize to recover correspondences via simple nearest neighbor relations. The resulting GrassGraph algorithm is empirically shown to work well in non-ideal scenarios with noise, outliers, and occlusions. Our validation benchmarks use an unprecedented 440,000+ experimental trials performed on 2D and 3D datasets, with a variety of parameter settings and competing methods. State-of-the-art performance in the majority of these extensive evaluations confirm the utility of our method.