 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFluidGaussian: Propagating Simulation-Based Uncertainty Toward Functionally-Intelligent 3D Reconstruction
Mar 22, 2026Real objects that inhabit the physical world follow physical laws and thus behave plausibly during interaction with other physical objects. However, current methods that perform 3D reconstructions of real-world scenes from multi-view 2D images optimize primarily for visual fidelity, i.e., they train with photometric losses and reason about uncertainty in the image or representation space. This appearance-centric view overlooks body contacts and couplings, conflates function-critical regions (e.g., aerodynamic or hydrodynamic surfaces) with ornamentation, and reconstructs structures suboptimally, even when physical regularizers are added. All these can lead to unphysical and implausible interactions. To address this, we consider the question: How can 3D reconstruction become aware of real-world interactions and underlying object functionality, beyond visual cues? To answer this question, we propose FluidGaussian, a plug-and-play method that tightly couples geometry reconstruction with ubiquitous fluid-structure interactions to assess surface quality at high granularity. We define a simulation-based uncertainty metric induced by fluid simulations and integrate it with active learning to prioritize views that improve both visual and physical fidelity. In an empirical evaluation on NeRF Synthetic (Blender), Mip-NeRF 360, and DrivAerNet++, our FluidGaussian method yields up to +8.6% visual PSNR (Peak Signal-to-Noise Ratio) and -62.3% velocity divergence during fluid simulations. Our code is available at https://github.com/delta-lab-ai/FluidGaussian.
Leveraging Monocular Disparity Estimation for Single-View Reconstruction
Jul 01, 2022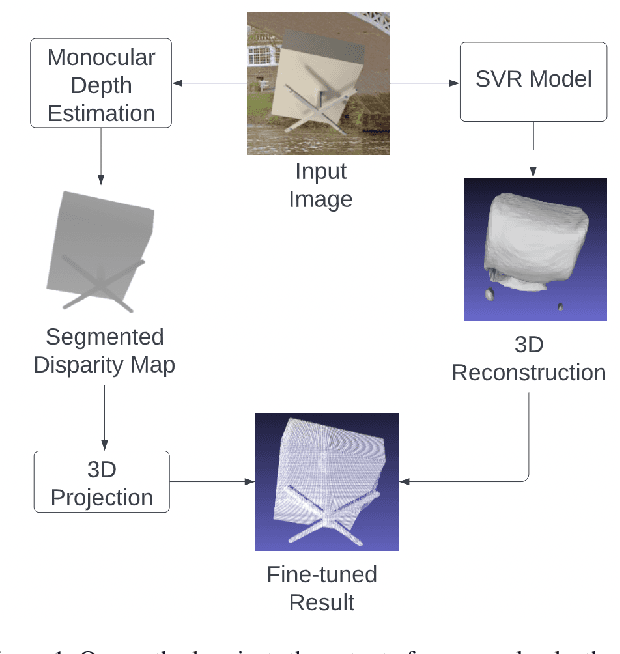
We present a fine-tuning method to improve the appearance of 3D geometries reconstructed from single images. We leverage advances in monocular depth estimation to obtain disparity maps and present a novel approach to transforming 2D normalized disparity maps into 3D point clouds by solving an optimization on the relevant camera parameters, After creating a 3D point cloud from disparity, we introduce a method to combine the new point cloud with existing information to form a more faithful and detailed final geometry. We demonstrate the efficacy of our approach with multiple experiments on both synthetic and real images.