 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Confidence Regularization for Multimodal Failure Detection
Mar 02, 2026The deployment of multimodal models in high-stakes domains, such as self-driving vehicles and medical diagnostics, demands not only strong predictive performance but also reliable mechanisms for detecting failures. In this work, we address the largely unexplored problem of failure detection in multimodal contexts. We propose Adaptive Confidence Regularization (ACR), a novel framework specifically designed to detect multimodal failures. Our approach is driven by a key observation: in most failure cases, the confidence of the multimodal prediction is significantly lower than that of at least one unimodal branch, a phenomenon we term confidence degradation. To mitigate this, we introduce an Adaptive Confidence Loss that penalizes such degradations during training. In addition, we propose Multimodal Feature Swapping, a novel outlier synthesis technique that generates challenging, failure-aware training examples. By training with these synthetic failures, ACR learns to more effectively recognize and reject uncertain predictions, thereby improving overall reliability. Extensive experiments across four datasets, three modalities, and multiple evaluation settings demonstrate that ACR achieves consistent and robust gains. The source code will be available at https://github.com/mona4399/ACR.
Extremely Simple Multimodal Outlier Synthesis for Out-of-Distribution Detection and Segmentation
May 22, 2025Out-of-distribution (OOD) detection and segmentation are crucial for deploying machine learning models in safety-critical applications such as autonomous driving and robot-assisted surgery. While prior research has primarily focused on unimodal image data, real-world applications are inherently multimodal, requiring the integration of multiple modalities for improved OOD detection. A key challenge is the lack of supervision signals from unknown data, leading to overconfident predictions on OOD samples. To address this challenge, we propose Feature Mixing, an extremely simple and fast method for multimodal outlier synthesis with theoretical support, which can be further optimized to help the model better distinguish between in-distribution (ID) and OOD data. Feature Mixing is modality-agnostic and applicable to various modality combinations. Additionally, we introduce CARLA-OOD, a novel multimodal dataset for OOD segmentation, featuring synthetic OOD objects across diverse scenes and weather conditions. Extensive experiments on SemanticKITTI, nuScenes, CARLA-OOD datasets, and the MultiOOD benchmark demonstrate that Feature Mixing achieves state-of-the-art performance with a $10 \times$ to $370 \times$ speedup. Our source code and dataset will be available at https://github.com/mona4399/FeatureMixing.
Explaining Unreliable Perception in Automated Driving: A Fuzzy-based Monitoring Approach
May 20, 2025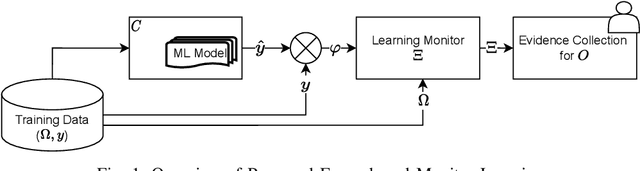

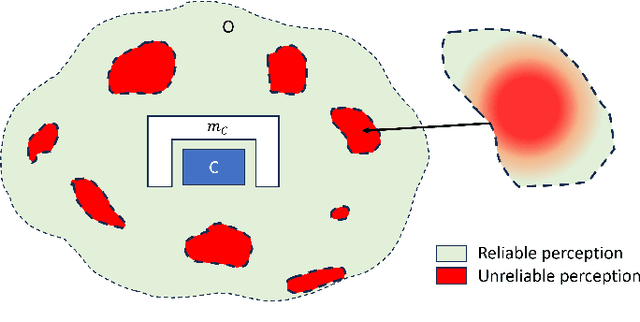
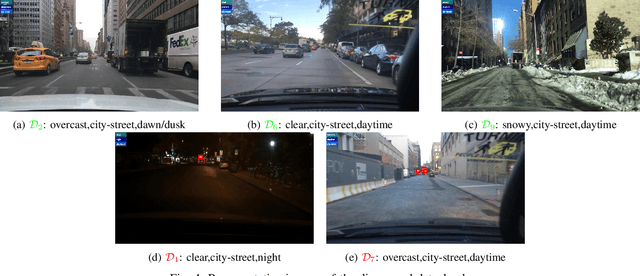
Autonomous systems that rely on Machine Learning (ML) utilize online fault tolerance mechanisms, such as runtime monitors, to detect ML prediction errors and maintain safety during operation. However, the lack of human-interpretable explanations for these errors can hinder the creation of strong assurances about the system's safety and reliability. This paper introduces a novel fuzzy-based monitor tailored for ML perception components. It provides human-interpretable explanations about how different operating conditions affect the reliability of perception components and also functions as a runtime safety monitor. We evaluated our proposed monitor using naturalistic driving datasets as part of an automated driving case study. The interpretability of the monitor was evaluated and we identified a set of operating conditions in which the perception component performs reliably. Additionally, we created an assurance case that links unit-level evidence of \textit{correct} ML operation to system-level \textit{safety}. The benchmarking demonstrated that our monitor achieved a better increase in safety (i.e., absence of hazardous situations) while maintaining availability (i.e., ability to perform the mission) compared to state-of-the-art runtime ML monitors in the evaluated dataset.