 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-Instructed Neural Networks for parametric problems with varying boundary conditions
Mar 09, 2026This work addresses the accurate and efficient simulation of physical phenomena governed by parametric Partial Differential Equations (PDEs) characterized by varying boundary conditions, where parametric instances modify not only the physics of the problem but also the imposition of boundary constraints on the computational domain. In such scenarios, classical Galerkin projection-based reduced order techniques encounter a fundamental bottleneck. Parametric boundaries typically necessitate a re-formulation of the discrete problem for each new configuration, and often, these approaches are unsuitable for real-time applications. To overcome these limitations, we propose a novel methodology based on Graph-Instructed Neural Networks (GINNs). The GINN framework effectively learns the mapping between the parametric description of the computational domain and the corresponding PDE solution. Our results demonstrate that the proposed GINN-based models, can efficiently represent highly complex parametric PDEs, serving as a robust and scalable asset for several applied-oriented settings when compared with fully connected architectures.
An extended physics informed neural network for preliminary analysis of parametric optimal control problems
Oct 26, 2021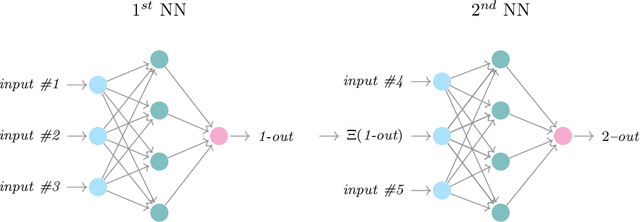
In this work we propose an extension of physics informed supervised learning strategies to parametric partial differential equations. Indeed, even if the latter are indisputably useful in many applications, they can be computationally expensive most of all in a real-time and many-query setting. Thus, our main goal is to provide a physics informed learning paradigm to simulate parametrized phenomena in a small amount of time. The physics information will be exploited in many ways, in the loss function (standard physics informed neural networks), as an augmented input (extra feature employment) and as a guideline to build an effective structure for the neural network (physics informed architecture). These three aspects, combined together, will lead to a faster training phase and to a more accurate parametric prediction. The methodology has been tested for several equations and also in an optimal control framework.