 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Based Robotic Disassembly Combined with Real-Time MFA Data Acquisition
Mar 30, 2026Stable and reliable supplies of rare-Earth minerals and critical raw materials (CRMs) are essential for the development of the European Union. Since a large share of these materials enters the Union from outside, a valid option for CRMs supply resilience and security is to recover them from end-of-use products. Hence, in this paper we present the preliminary phases of the development of real-time visual detection of PC desktop components running on edge devices to simultaneously achieve two goals. The first goal is to perform robotic disassembly of PC desktops, where the adaptivity of learning-based vision can enable the processing of items with unpredictable geometry caused by accidental damages. We also discuss the robot end-effectors for different PC components with the object contact points derivable from neural detector bounding boxes. The second goal is to provide in an autonomous, highly-granular, and timely fashion, the data needed to perform material flow analysis (MFA) since, to date, MFA often lacks of the data needed to accurately study material stocks and flows. The second goal is achievable thanks to the recently-proposed synchromaterials, which can generate both local and wide-area (e.g., national) material mass information in a real-time and synchronized fashion.
Wearable Haptics for a Marionette-inspired Teleoperation of Highly Redundant Robotic Systems
Mar 20, 2025The teleoperation of complex, kinematically redundant robots with loco-manipulation capabilities represents a challenge for human operators, who have to learn how to operate the many degrees of freedom of the robot to accomplish a desired task. In this context, developing an easy-to-learn and easy-to-use human-robot interface is paramount. Recent works introduced a novel teleoperation concept, which relies on a virtual physical interaction interface between the human operator and the remote robot equivalent to a "Marionette" control, but whose feedback was limited to only visual feedback on the human side. In this paper, we propose extending the "Marionette" interface by adding a wearable haptic interface to cope with the limitations given by the previous works. Leveraging the additional haptic feedback modality, the human operator gains full sensorimotor control over the robot, and the awareness about the robot's response and interactions with the environment is greatly improved. We evaluated the proposed interface and the related teleoperation framework with naive users, assessing the teleoperation performance and the user experience with and without haptic feedback. The conducted experiments consisted in a loco-manipulation mission with the CENTAURO robot, a hybrid leg-wheel quadruped with a humanoid dual-arm upper body.
* 7 pages, 8 figures
Learning Skills from Demonstrations: A Trend from Motion Primitives to Experience Abstraction
Oct 14, 2022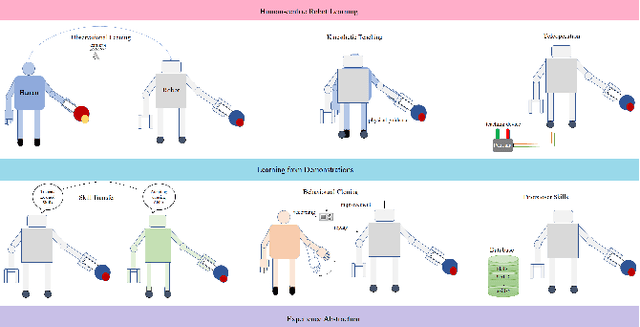
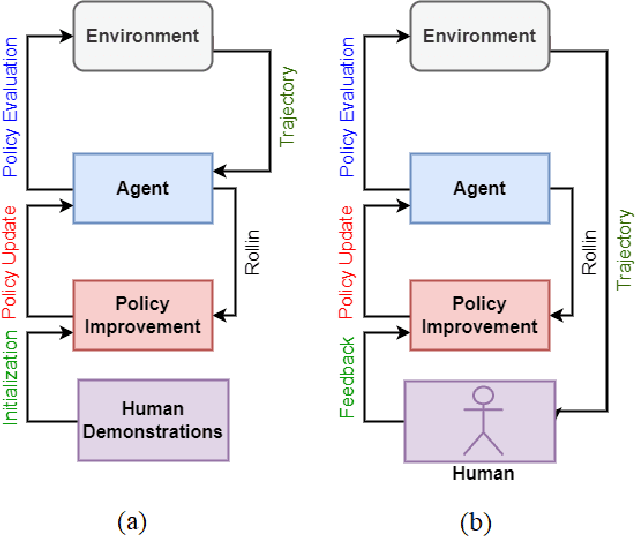
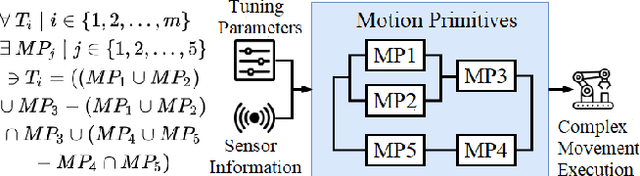

The uses of robots are changing from static environments in factories to encompass novel concepts such as Human-Robot Collaboration in unstructured settings. Pre-programming all the functionalities for robots becomes impractical, and hence, robots need to learn how to react to new events autonomously, just like humans. However, humans, unlike machines, are naturally skilled in responding to unexpected circumstances based on either experiences or observations. Hence, embedding such anthropoid behaviours into robots entails the development of neuro-cognitive models that emulate motor skills under a robot learning paradigm. Effective encoding of these skills is bound to the proper choice of tools and techniques. This paper studies different motion and behaviour learning methods ranging from Movement Primitives (MP) to Experience Abstraction (EA), applied to different robotic tasks. These methods are scrutinized and then experimentally benchmarked by reconstructing a standard pick-n-place task. Apart from providing a standard guideline for the selection of strategies and algorithms, this paper aims to draw a perspectives on their possible extensions and improvements