 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Controller Learning from Human Preferences and Numerical Data Via Multi-Modal Surrogate Models
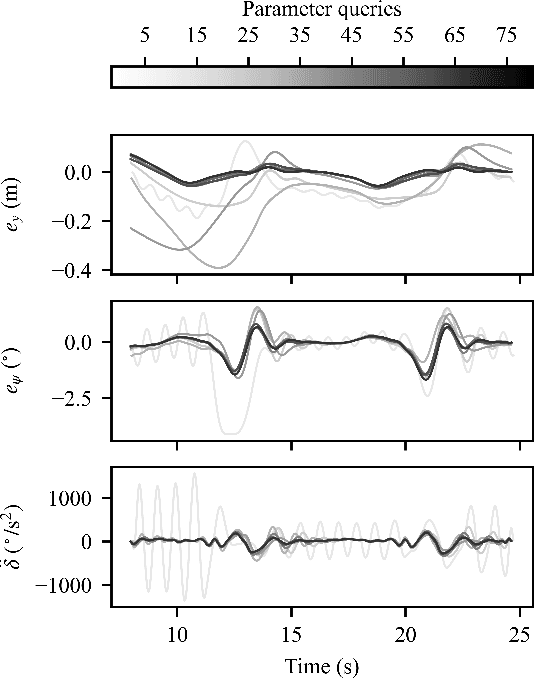
Mar 25, 2026Tuning control policies manually to meet high-level objectives is often time-consuming. Bayesian optimization provides a data-efficient framework for automating this process using numerical evaluations of an objective function. However, many systems, particularly those involving humans, require optimization based on subjective criteria. Preferential Bayesian optimization addresses this by learning from pairwise comparisons instead of quantitative measurements, but relying solely on preference data can be inefficient. We propose a multi-fidelity, multi-modal Bayesian optimization framework that integrates low-fidelity numerical data with high-fidelity human preferences. Our approach employs Gaussian process surrogate models with both hierarchical, autoregressive and non-hierarchical, coregionalization-based structures, enabling efficient learning from mixed-modality data. We illustrate the framework by tuning an autonomous vehicle's trajectory planner, showing that combining numerical and preference data significantly reduces the need for experiments involving the human decision maker while effectively adapting driving style to individual preferences.
High-Dimensional Surrogate Modeling for Closed-Loop Learning of Neural-Network-Parameterized Model Predictive Control
Dec 12, 2025Learning controller parameters from closed-loop data has been shown to improve closed-loop performance. Bayesian optimization, a widely used black-box and sample-efficient learning method, constructs a probabilistic surrogate of the closed-loop performance from few experiments and uses it to select informative controller parameters. However, it typically struggles with dense high-dimensional controller parameterizations, as they may appear, for example, in tuning model predictive controllers, because standard surrogate models fail to capture the structure of such spaces. This work suggests that the use of Bayesian neural networks as surrogate models may help to mitigate this limitation. Through a comparison between Gaussian processes with Matern kernels, finite-width Bayesian neural networks, and infinite-width Bayesian neural networks on a cart-pole task, we find that Bayesian neural network surrogate models achieve faster and more reliable convergence of the closed-loop cost and enable successful optimization of parameterizations with hundreds of dimensions. Infinite-width Bayesian neural networks also maintain performance in settings with more than one thousand parameters, whereas Matern-kernel Gaussian processes rapidly lose effectiveness. These results indicate that Bayesian neural network surrogate models may be suitable for learning dense high-dimensional controller parameterizations and offer practical guidance for selecting surrogate models in learning-based controller design.
Efficient Learning of Vehicle Controller Parameters via Multi-Fidelity Bayesian Optimization: From Simulation to Experiment
Jun 10, 2025

Parameter tuning for vehicle controllers remains a costly and time-intensive challenge in automotive development. Traditional approaches rely on extensive real-world testing, making the process inefficient. We propose a multi-fidelity Bayesian optimization approach that efficiently learns optimal controller parameters by leveraging both low-fidelity simulation data and a very limited number of real-world experiments. Our approach significantly reduces the need for manual tuning and expensive field testing while maintaining the standard two-stage development workflow used in industry. The core contribution is the integration of an auto-regressive multi-fidelity Gaussian process model into Bayesian optimization, enabling knowledge transfer between different fidelity levels without requiring additional low-fidelity evaluations during real-world testing. We validate our approach through both simulation studies and realworld experiments. The results demonstrate that our method achieves high-quality controller performance with only very few real-world experiments, highlighting its potential as a practical and scalable solution for intelligent vehicle control tuning in industrial applications.
Safe Learning-Based Optimization of Model Predictive Control: Application to Battery Fast-Charging
Oct 07, 2024



Model predictive control (MPC) is a powerful tool for controlling complex nonlinear systems under constraints, but often struggles with model uncertainties and the design of suitable cost functions. To address these challenges, we discuss an approach that integrates MPC with safe Bayesian optimization to optimize long-term closed-loop performance despite significant model-plant mismatches. By parameterizing the MPC stage cost function using a radial basis function network, we employ Bayesian optimization as a multi-episode learning strategy to tune the controller without relying on precise system models. This method mitigates conservativeness introduced by overly cautious soft constraints in the MPC cost function and provides probabilistic safety guarantees during learning, ensuring that safety-critical constraints are met with high probability. As a practical application, we apply our approach to fast charging of lithium-ion batteries, a challenging task due to the complicated battery dynamics and strict safety requirements, subject to the requirement to be implementable in real time. Simulation results demonstrate that, in the context of model-plant mismatch, our method reduces charging times compared to traditional MPC methods while maintaining safety. This work extends previous research by emphasizing closed-loop constraint satisfaction and offers a promising solution for enhancing performance in systems where model uncertainties and safety are critical concerns.
Safe and Stable Closed-Loop Learning for Neural-Network-Supported Model Predictive Control
Sep 16, 2024

Safe learning of control policies remains challenging, both in optimal control and reinforcement learning. In this article, we consider safe learning of parametrized predictive controllers that operate with incomplete information about the underlying process. To this end, we employ Bayesian optimization for learning the best parameters from closed-loop data. Our method focuses on the system's overall long-term performance in closed-loop while keeping it safe and stable. Specifically, we parametrize the stage cost function of an MPC using a feedforward neural network. This allows for a high degree of flexibility, enabling the system to achieve a better closed-loop performance with respect to a superordinate measure. However, this flexibility also necessitates safety measures, especially with respect to closed-loop stability. To this end, we explicitly incorporated stability information in the Bayesian-optimization-based learning procedure, thereby achieving rigorous probabilistic safety guarantees. The proposed approach is illustrated using a numeric example.
Stability-informed Bayesian Optimization for MPC Cost Function Learning
Apr 18, 2024


Designing predictive controllers towards optimal closed-loop performance while maintaining safety and stability is challenging. This work explores closed-loop learning for predictive control parameters under imperfect information while considering closed-loop stability. We employ constrained Bayesian optimization to learn a model predictive controller's (MPC) cost function parametrized as a feedforward neural network, optimizing closed-loop behavior as well as minimizing model-plant mismatch. Doing so offers a high degree of freedom and, thus, the opportunity for efficient and global optimization towards the desired and optimal closed-loop behavior. We extend this framework by stability constraints on the learned controller parameters, exploiting the optimal value function of the underlying MPC as a Lyapunov candidate. The effectiveness of the proposed approach is underlined in simulations, highlighting its performance and safety capabilities.
Model Predictive Control with Gaussian-Process-Supported Dynamical Constraints for Autonomous Vehicles
Mar 08, 2023



We propose a model predictive control approach for autonomous vehicles that exploits learned Gaussian processes for predicting human driving behavior. The proposed approach employs the uncertainty about the GP's prediction to achieve safety. A multi-mode predictive control approach considers the possible intentions of the human drivers. While the intentions are represented by different Gaussian processes, their probabilities foreseen in the observed behaviors are determined by a suitable online classification. Intentions below a certain probability threshold are neglected to improve performance. The proposed multi-mode model predictive control approach with Gaussian process regression support enables repeated feasibility and probabilistic constraint satisfaction with high probability. The approach is underlined in simulation, considering real-world measurements for training the Gaussian processes.