 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Controller Learning from Human Preferences and Numerical Data Via Multi-Modal Surrogate Models
Mar 25, 2026Tuning control policies manually to meet high-level objectives is often time-consuming. Bayesian optimization provides a data-efficient framework for automating this process using numerical evaluations of an objective function. However, many systems, particularly those involving humans, require optimization based on subjective criteria. Preferential Bayesian optimization addresses this by learning from pairwise comparisons instead of quantitative measurements, but relying solely on preference data can be inefficient. We propose a multi-fidelity, multi-modal Bayesian optimization framework that integrates low-fidelity numerical data with high-fidelity human preferences. Our approach employs Gaussian process surrogate models with both hierarchical, autoregressive and non-hierarchical, coregionalization-based structures, enabling efficient learning from mixed-modality data. We illustrate the framework by tuning an autonomous vehicle's trajectory planner, showing that combining numerical and preference data significantly reduces the need for experiments involving the human decision maker while effectively adapting driving style to individual preferences.
Efficient Learning of Vehicle Controller Parameters via Multi-Fidelity Bayesian Optimization: From Simulation to Experiment
Jun 10, 2025
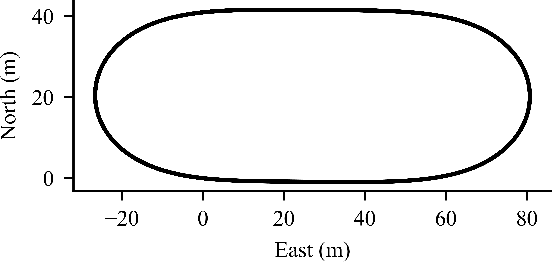
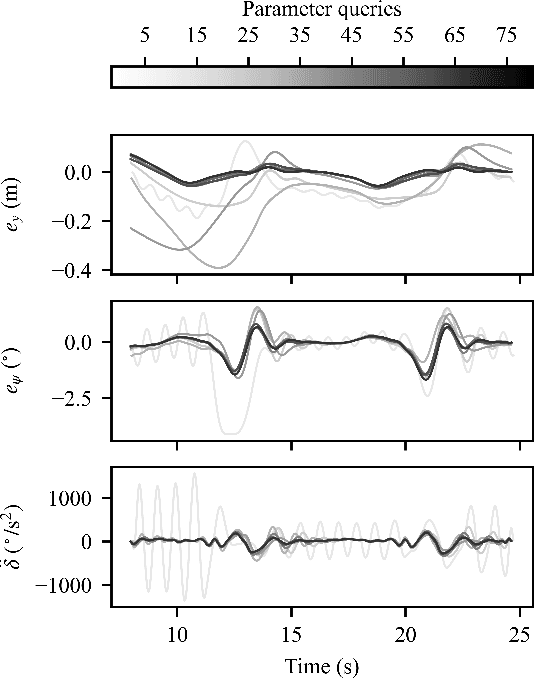

Parameter tuning for vehicle controllers remains a costly and time-intensive challenge in automotive development. Traditional approaches rely on extensive real-world testing, making the process inefficient. We propose a multi-fidelity Bayesian optimization approach that efficiently learns optimal controller parameters by leveraging both low-fidelity simulation data and a very limited number of real-world experiments. Our approach significantly reduces the need for manual tuning and expensive field testing while maintaining the standard two-stage development workflow used in industry. The core contribution is the integration of an auto-regressive multi-fidelity Gaussian process model into Bayesian optimization, enabling knowledge transfer between different fidelity levels without requiring additional low-fidelity evaluations during real-world testing. We validate our approach through both simulation studies and realworld experiments. The results demonstrate that our method achieves high-quality controller performance with only very few real-world experiments, highlighting its potential as a practical and scalable solution for intelligent vehicle control tuning in industrial applications.