 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating OCR Performance for Assistive Technology: Effects of Walking Speed, Camera Placement, and Camera Type
Feb 02, 2026Optical character recognition (OCR), which converts printed or handwritten text into machine-readable form, is widely used in assistive technology for people with blindness and low vision. Yet, most evaluations rely on static datasets that do not reflect the challenges of mobile use. In this study, we systematically evaluated OCR performance under both static and dynamic conditions. Static tests measured detection range across distances of 1-7 meters and viewing angles of 0-75 degrees horizontally. Dynamic tests examined the impact of motion by varying walking speed from slow (0.8 m/s) to very fast (1.8 m/s) and comparing three camera mounting positions: head-mounted, shoulder-mounted, and hand-held. We evaluated both a smartphone and smart glasses, using the phone's main and ultra-wide cameras. Four OCR engines were benchmarked to assess accuracy at different distances and viewing angles: Google Vision, PaddleOCR 3.0, EasyOCR, and Tesseract. PaddleOCR 3.0 was then used to evaluate accuracy at different walking speeds. Accuracy was computed at the character level using the Levenshtein ratio against manually defined ground truth. Results showed that recognition accuracy declined with increased walking speed and wider viewing angles. Google Vision achieved the highest overall accuracy, with PaddleOCR close behind as the strongest open-source alternative. Across devices, the phone's main camera achieved the highest accuracy, and a shoulder-mounted placement yielded the highest average among body positions; however, differences among shoulder, head, and hand were not statistically significant.
Can Foundation Models Reliably Identify Spatial Hazards? A Case Study on Curb Segmentation
Jun 11, 2024Curbs serve as vital borders that delineate safe pedestrian zones from potential vehicular traffic hazards. Curbs also represent a primary spatial hazard during dynamic navigation with significant stumbling potential. Such vulnerabilities are particularly exacerbated for persons with blindness and low vision (PBLV). Accurate visual-based discrimination of curbs is paramount for assistive technologies that aid PBLV with safe navigation in urban environments. Herein, we investigate the efficacy of curb segmentation for foundation models. We introduce the largest curb segmentation dataset to-date to benchmark leading foundation models. Our results show that state-of-the-art foundation models face significant challenges in curb segmentation. This is due to their high false-positive rates (up to 95%) with poor performance distinguishing curbs from curb-like objects or non-curb areas, such as sidewalks. In addition, the best-performing model averaged a 3.70-second inference time, underscoring problems in providing real-time assistance. In response, we propose solutions including filtered bounding box selections to achieve more accurate curb segmentation. Overall, despite the immediate flexibility of foundation models, their application for practical assistive technology applications still requires refinement. This research highlights the critical need for specialized datasets and tailored model training to address navigation challenges for PBLV and underscores implicit weaknesses in foundation models.
UNav: An Infrastructure-Independent Vision-Based Navigation System for People with Blindness and Low vision
Sep 22, 2022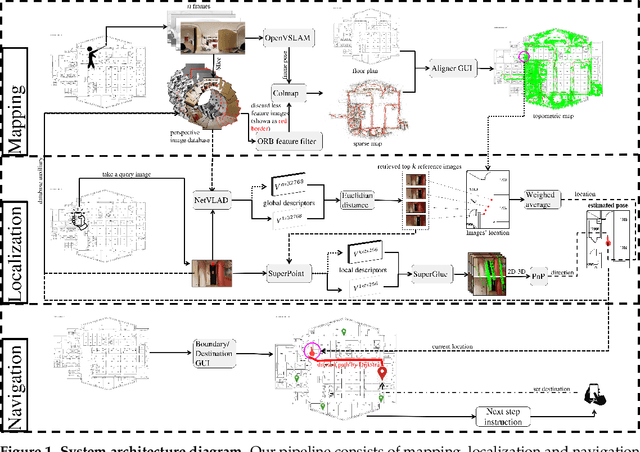

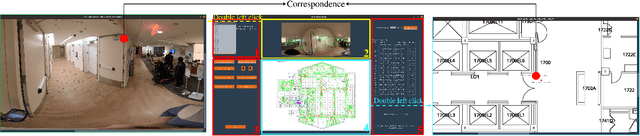
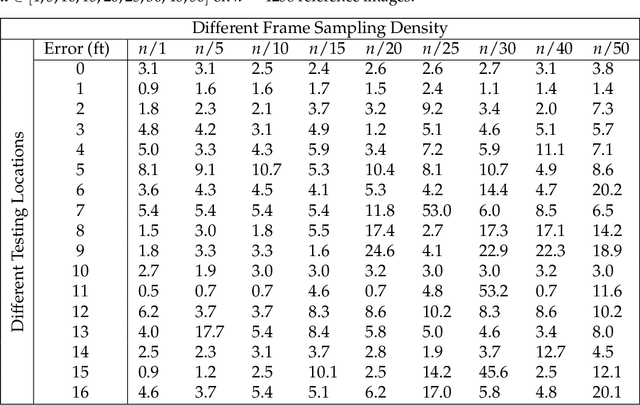
Vision-based localization approaches now underpin newly emerging navigation pipelines for myriad use cases from robotics to assistive technologies. Compared to sensor-based solutions, vision-based localization does not require pre-installed sensor infrastructure, which is costly, time-consuming, and/or often infeasible at scale. Herein, we propose a novel vision-based localization pipeline for a specific use case: navigation support for end-users with blindness and low vision. Given a query image taken by an end-user on a mobile application, the pipeline leverages a visual place recognition (VPR) algorithm to find similar images in a reference image database of the target space. The geolocations of these similar images are utilized in downstream tasks that employ a weighted-average method to estimate the end-user's location and a perspective-n-point (PnP) algorithm to estimate the end-user's direction. Additionally, this system implements Dijkstra's algorithm to calculate a shortest path based on a navigable map that includes trip origin and destination. The topometric map used for localization and navigation is built using a customized graphical user interface that projects a 3D reconstructed sparse map, built from a sequence of images, to the corresponding a priori 2D floor plan. Sequential images used for map construction can be collected in a pre-mapping step or scavenged through public databases/citizen science. The end-to-end system can be installed on any internet-accessible device with a camera that hosts a custom mobile application. For evaluation purposes, mapping and localization were tested in a complex hospital environment. The evaluation results demonstrate that our system can achieve localization with an average error of less than 1 meter without knowledge of the camera's intrinsic parameters, such as focal length.
Network-Aware 5G Edge Computing for Object Detection: Augmenting Wearables to "See'' More, Farther and Faster
Dec 25, 2021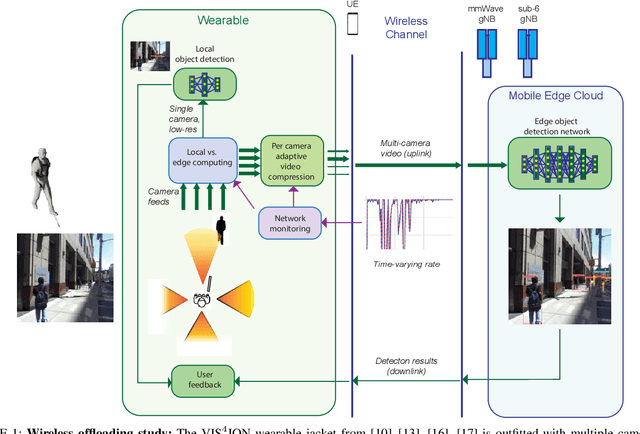
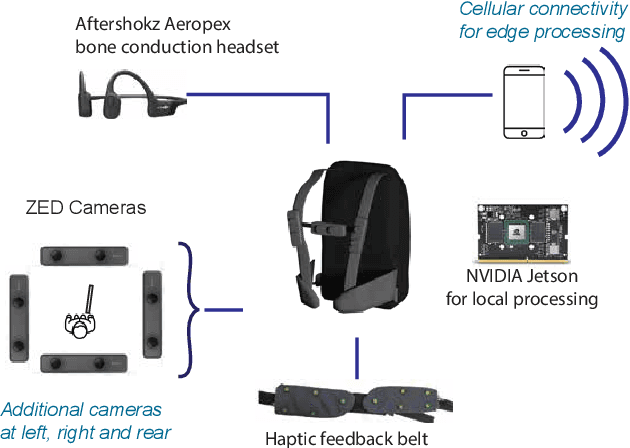
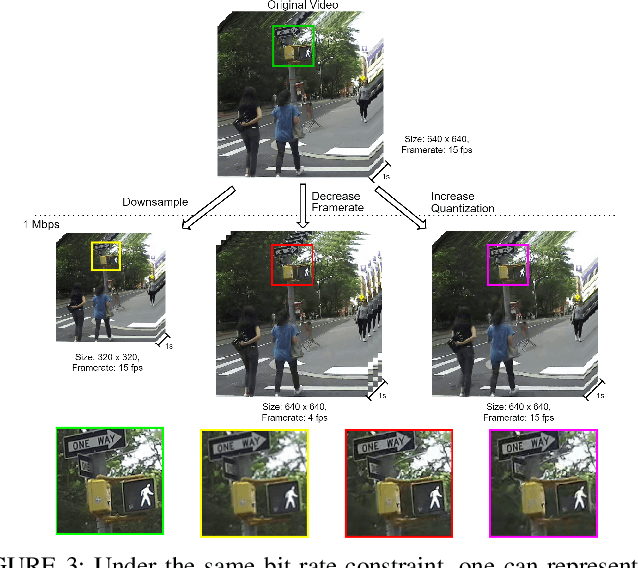
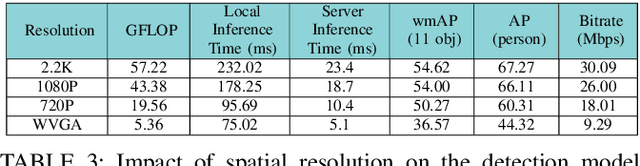
Advanced wearable devices are increasingly incorporating high-resolution multi-camera systems. As state-of-the-art neural networks for processing the resulting image data are computationally demanding, there has been growing interest in leveraging fifth generation (5G) wireless connectivity and mobile edge computing for offloading this processing to the cloud. To assess this possibility, this paper presents a detailed simulation and evaluation of 5G wireless offloading for object detection within a powerful, new smart wearable called VIS4ION, for the Blind-and-Visually Impaired (BVI). The current VIS4ION system is an instrumented book-bag with high-resolution cameras, vision processing and haptic and audio feedback. The paper considers uploading the camera data to a mobile edge cloud to perform real-time object detection and transmitting the detection results back to the wearable. To determine the video requirements, the paper evaluates the impact of video bit rate and resolution on object detection accuracy and range. A new street scene dataset with labeled objects relevant to BVI navigation is leveraged for analysis. The vision evaluation is combined with a detailed full-stack wireless network simulation to determine the distribution of throughputs and delays with real navigation paths and ray-tracing from new high-resolution 3D models in an urban environment. For comparison, the wireless simulation considers both a standard 4G-Long Term Evolution (LTE) carrier and high-rate 5G millimeter-wave (mmWave) carrier. The work thus provides a thorough and realistic assessment of edge computing with mmWave connectivity in an application with both high bandwidth and low latency requirements.