 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurrogate-Enhanced Modeling and Adaptive Modular Control of All-Electric Heavy-Duty Robotic Manipulators
Aug 08, 2025This paper presents a unified system-level modeling and control framework for an all-electric heavy-duty robotic manipulator (HDRM) driven by electromechanical linear actuators (EMLAs). A surrogate-enhanced actuator model, combining integrated electromechanical dynamics with a neural network trained on a dedicated testbed, is integrated into an extended virtual decomposition control (VDC) architecture augmented by a natural adaptation law. The derived analytical HDRM model supports a hierarchical control structure that seamlessly maps high-level force and velocity objectives to real-time actuator commands, accompanied by a Lyapunov-based stability proof. In multi-domain simulations of both cubic and a custom planar triangular trajectory, the proposed adaptive modular controller achieves sub-centimeter Cartesian tracking accuracy. Experimental validation of the same 1-DoF platform under realistic load emulation confirms the efficacy of the proposed control strategy. These findings demonstrate that a surrogate-enhanced EMLA model embedded in the VDC approach can enable modular, real-time control of an all-electric HDRM, supporting its deployment in next-generation mobile working machines.
Robust Immersive Bilateral Teleoperation of Dissimilar Systems with Enhanced Transparency and Sense of Embodiment
May 20, 2025In human-in-the-loop systems such as teleoperation, especially those involving heavy-duty manipulators, achieving high task performance requires both robust control and strong human engagement. This paper presents a bilateral teleoperation framework that enhances the operator's Sense of Embodiment (SoE), specifically, the senses of agency and self-location, through an immersive virtual reality interface and distributed haptic feedback via an exoskeleton. To support this embodiment and stablish high level of motion and force transparency, we develop a force-sensorless, robust control architecture that tackles input nonlinearities, master-slave asymmetries, unknown uncertainties, and arbitrary time delays. A human-robot augmented dynamic model is integrated into the control loop to enhance human-adaptability of the controller. Theoretical analysis confirms semi-global uniform ultimate boundedness of the closed-loop system. Extensive real-world experiments demonstrate high accuracy tracking under up to 1:13 motion scaling and 1:1000 force scaling, showcasing the significance of the results. Additionally, the stability-transparency tradeoff for motion tracking and force reflection-tracking is establish up to 150 ms of one-way fix and time-varying communication delay. The results of user study with 10 participants (9 male and 1 female) demonstrated that the system can imply a good level of SoE (76.4%), at the same time is very user friendly with no gender limitation. These results are significant given the scale and weight of the heavy-duty manipulators.
Desired Impedance Allocation for Robotic Systems
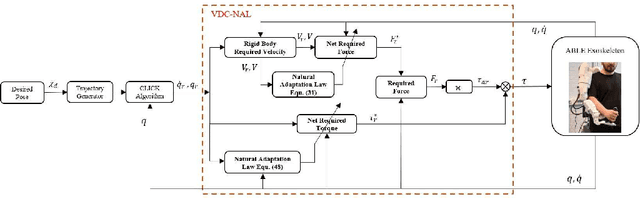
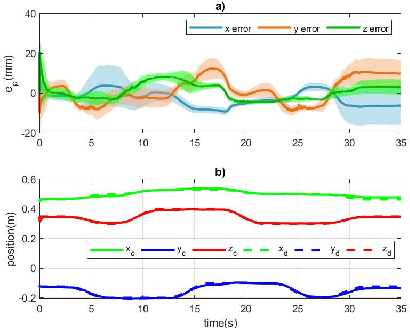
May 02, 2025Virtual Decomposition Control (VDC) has emerged as a powerful modular framework for real-world robotic control, particularly in contact-rich tasks. Despite its widespread use, VDC has been fundamentally limited to first-order impedance allocation, inherently neglecting the desired inertia due to the mathematical complexity of second-order behavior allocation. However, inertia is crucial, not only for shaping dynamic responses during contact phases, but also for enabling smooth acceleration and deceleration in trajectory tracking. Motivated by the growing demand for high-fidelity interaction control, this work introduces, for the first time in the VDC framework, a method to realize second-order impedance behavior. By redefining the required end-effector velocity and introducing a required acceleration and a pseudo-impedance term, we achieve second-order impedance control while preserving the modularity of VDC. Rigorous stability analysis confirms the robustness of the proposed controller. Experimental validation on a 7-degree-of-freedom haptic exoskeleton demonstrates superior tracking and contact performance compared to first-order methods. Notably, incorporating inertia enables stable interaction with environments up to 70% stiffer, highlighting the effectiveness of the approach in real-world contact-rich scenarios.
Impact-Resilient Orchestrated Robust Controller for Heavy-duty Hydraulic Manipulators
Aug 17, 2024



Heavy-duty operations, typically performed using heavy-duty hydraulic manipulators (HHMs), are susceptible to environmental contact due to tracking errors or sudden environmental changes. Therefore, beyond precise control design, it is crucial that the manipulator be resilient to potential impacts without relying on contact-force sensors, which mostly cannot be utilized. This paper proposes a novel force-sensorless robust impact-resilient controller for a generic 6-degree-of-freedom (DoF) HHM constituting from anthropomorphic arm and spherical wrist mechanisms. The scheme consists of a neuroadaptive subsystem-based impedance controller, which is designed to ensure both accurate tracking of position and orientation with stabilization of HHMs upon contact, along with a novel generalized momentum observer, which is for the first time introduced in Pl\"ucker coordinate, to estimate the impact force. Finally, by leveraging the concepts of virtual stability and virtual power flow, the semi-global uniformly ultimately boundedness of the entire system is assured. To demonstrate the efficacy and versatility of the proposed method, extensive experiments were conducted using a generic 6-DoF industrial HHM. The experimental results confirm the exceptional performance of the designed method by achieving a subcentimeter tracking accuracy and by 80% reduction of impact of the contact.
Orchestrated Robust Controller for the Precision Control of Heavy-duty Hydraulic Manipulators
Dec 11, 2023



Vast industrial investment along with increased academic research on hydraulic heavy-duty manipulators has unavoidably paved the way for their automatization, necessitating the design of robust and high-precision controllers. In this study, an orchestrated robust controller is designed to address the mentioned issue. To do so, the entire robotic system is decomposed into subsystems, and a robust controller is designed at each local subsystem by considering unknown model uncertainties, unknown disturbances, and compound input constraints, thanks to virtual decomposition control (VDC). As such, radial basic function neural networks (RBFNNs) are incorporated into VDC to tackle unknown disturbances and uncertainties, resulting in novel decentralized RBFNNs. All these robust local controllers designed at each local subsystem are, then, orchestrated to accomplish high-precision control. In the end, for the first time in the context of VDC, a semi-globally uniformly ultimate boundedness is achieved under the designed controller. The validity of the theoretical results is verified by performing extensive simulations and experiments on a 6-degrees-of-freedom industrial manipulator with a nominal lifting capacity of $600\, kg$ at $5$ meters reach. Comparing the simulation result to state-of-the-art controller along with provided experimental results, demonstrates that the proposed method established all the promises and performed excellently.
Nonlinear Subsystem-based Adaptive Impedance Control of Physical Human-Robot-Environment Interaction in Contact-rich Tasks
Mar 02, 2023Haptic upper limb exoskeletons are robots that assist human operators during task execution while having the ability to render virtual or remote environments. Therefore, the stability of such robots in physical human-robot-environment interaction must be guaranteed, in addition to performing well during task execution. Having a wide range of Z-width, which shows the region of passively renderable impedance by a haptic display, is also important to render a wide range of virtual environments. To address these issues, in this study, subsystem-based adaptive impedance control is designed for having a stable human-robot-environment interaction of 7 degrees of freedom haptic exoskeleton. The presented control decomposes the entire system into subsystems and designs the controller at the subsystem level. The stability of the controller in the presence of contact with the virtual environment and human arm force is proved by employing the virtual stability concept. Additionally, the Z-width of the 7-DoF haptic exoskeleton is drawn using experimental data and improved using varying virtual mass element for the virtual environment. Finally, experimental results are provided to demonstrate the perfect performance of the proposed controller in accomplishing the predefined task.
Physical Human-Robot Interaction Control of an Upper Limb Exoskeleton with a Decentralized Neuro-Adaptive Control Scheme
Sep 29, 2022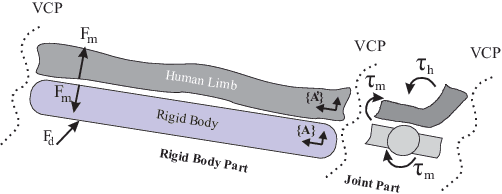
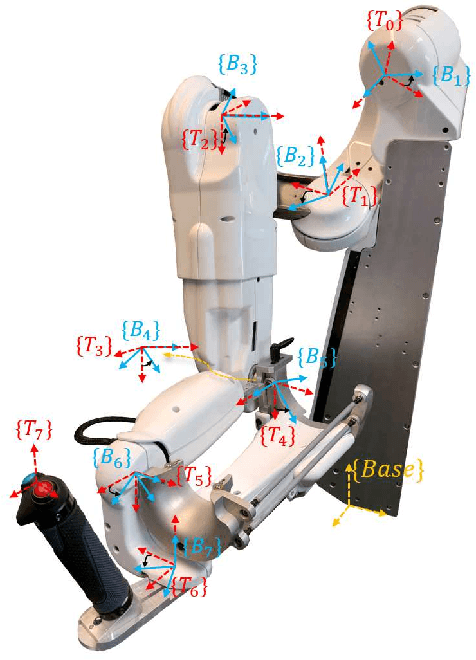
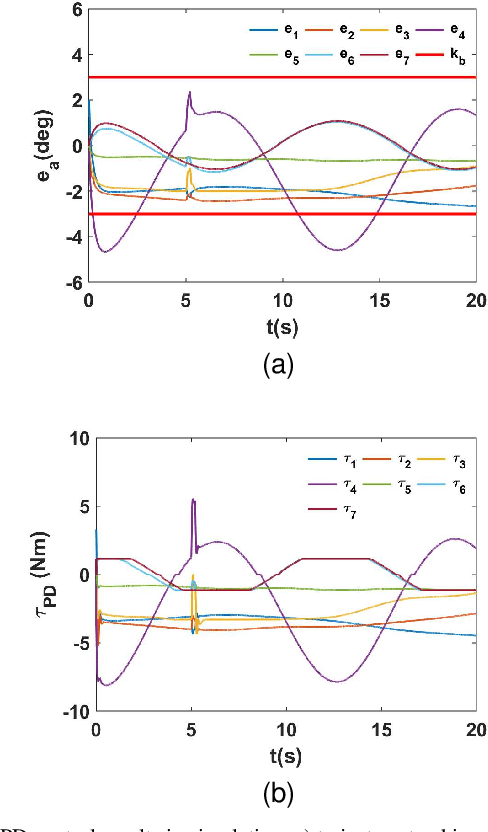
In the concept of physical human-robot interaction (pHRI), the most important criterion is the safety of a human operator interacting with a high degrees of freedom (DoF) robot. Therefore, a robust control scheme is of high demand to establish safe pHRI and stabilize nonlinear, high DoF systems. In this paper, an adaptive decentralized control strategy is designed to accomplish mentioned objectives. To do so, human upper limb model and exoskeleton model are decentralized and augmented at the subsystem level to be able to design a decentralized control action. Moreover, human exogenous force (HEF) that can resist exoskeleton motion is estimated using radial basic function neural networks (RBFNNs). Estimating both human upper limb and robot rigid body parameters along with HEF estimation makes the controller adaptable to different operators, ensuring their physical safety. The \emph{barrier Lyapunov function} (BLF), on the other hand, is employed to guarantee that the robot will work in a safe workspace while ensuring stability by adjusting the control law. Additionally, unknown actuator uncertainty and constraints are considered in this study to ensure a smooth and safe pHRI. Then, the asymptotic stability of the whole system is established by means of the \emph{virtual stability} concept and \emph{virtual power flows} (VPFs). Numerical and experimental results are provided and compared to PD controller to demonstrate the excellent performance of the proposed controller. As a result, the proposed controller accomplished all the control objectives with nearly zero error and low computed torque, ensuring physical safety in pHRI.
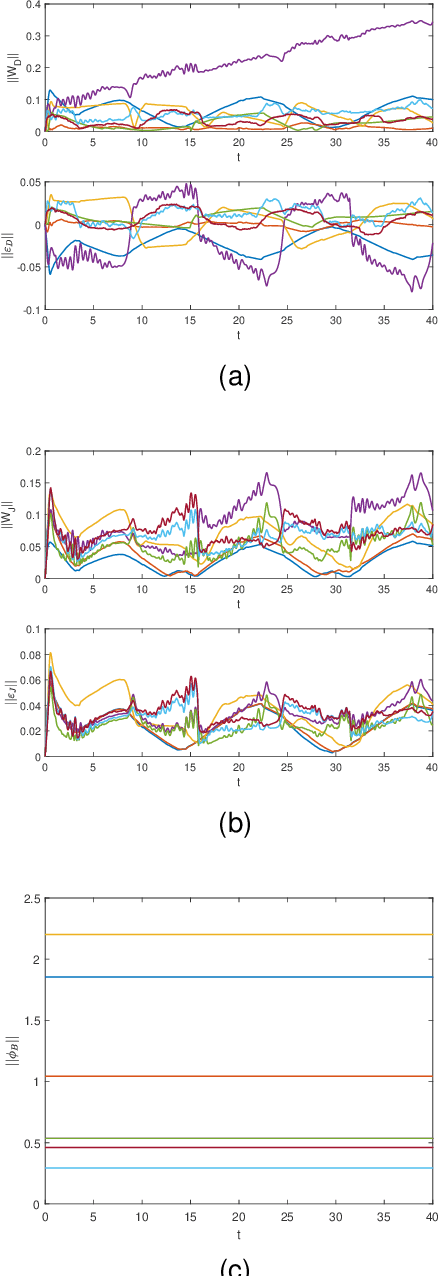
Decentralized Nonlinear Control of Redundant Upper Limb Exoskeleton with Natural Adaptation Law
Aug 25, 2022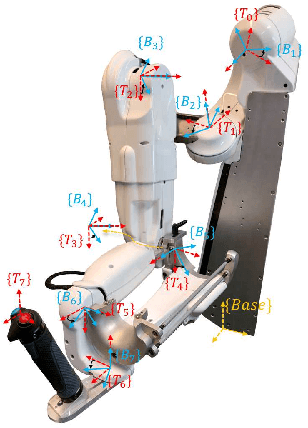
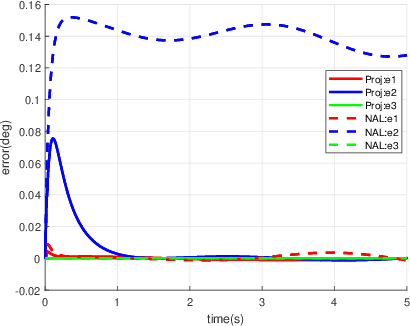
The aim of this work is to utilize an adaptive decentralized control method called virtual decomposition control (VDC) to control the orientation and position of the end-effector of a 7 degrees of freedom (DoF) right-hand upper-limb exoskeleton. The prevailing adaptive VDC approach requires tuning of 13n adaptation gains along with 26n upper and lower parameter bounds, where n is the number of rigid bodies. Therefore, utilizing the VDC scheme to control high DoF robots like the 7-DoF upper-limb exoskeleton can be an arduous task. In this paper, a new adaptation function, so-called natural adaptation law (NAL), is employed to eliminate these burdens from VDC, which results in reducing all 13n gains to one and removing dependency on upper and lower bounds. In doing so, VDC-based dynamic equations are restructured, and inertial parameter vectors are made compatible with NAL. Then, the NAL adaptation function is exploited to design a new adaptive VDC scheme. This novel adaptive VDC approach ensures physical consistency conditions for estimated parameters with no need for upper and lower bounds. Finally, the asymptotic stability of the algorithm is proved with the virtual stability concept and the accompanying function. The experimental results are utilized to demonstrate the excellent performance of the proposed new adaptive VDC scheme.