 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Preserving Generative Adversarial Network for Imbalance classification
Sep 04, 2022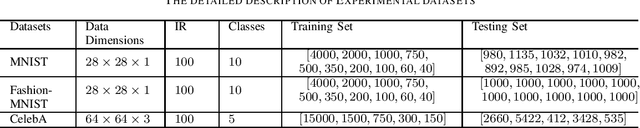
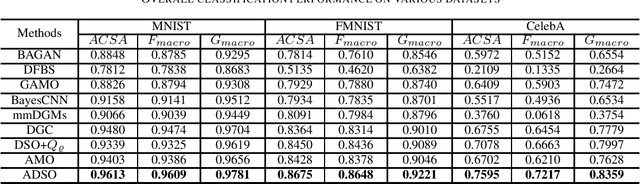
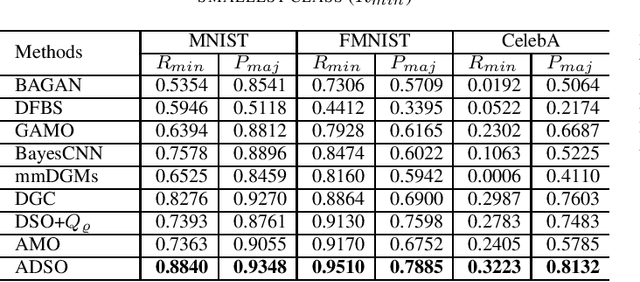
Many real-world classification problems have imbalanced frequency of class labels; a well-known issue known as the "class imbalance" problem. Classic classification algorithms tend to be biased towards the majority class, leaving the classifier vulnerable to misclassification of the minority class. While the literature is rich with methods to fix this problem, as the dimensionality of the problem increases, many of these methods do not scale-up and the cost of running them become prohibitive. In this paper, we present an end-to-end deep generative classifier. We propose a domain-constraint autoencoder to preserve the latent-space as prior for a generator, which is then used to play an adversarial game with two other deep networks, a discriminator and a classifier. Extensive experiments are carried out on three different multi-class imbalanced problems and a comparison with state-of-the-art methods. Experimental results confirmed the superiority of our method over popular algorithms in handling high-dimensional imbalanced classification problems. Our code is available on https://github.com/TanmDL/SLPPL-GAN.
Autonomous Cross Domain Adaptation under Extreme Label Scarcity
Sep 04, 2022
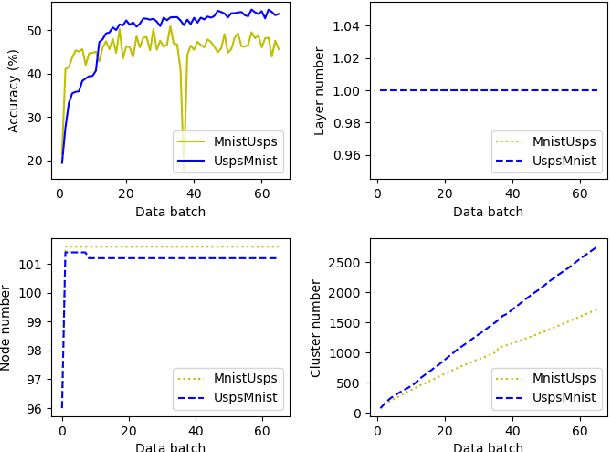
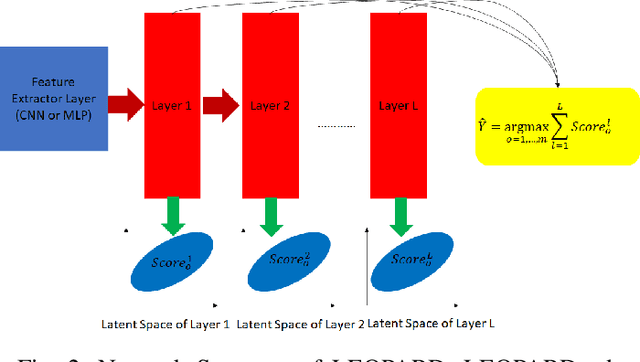
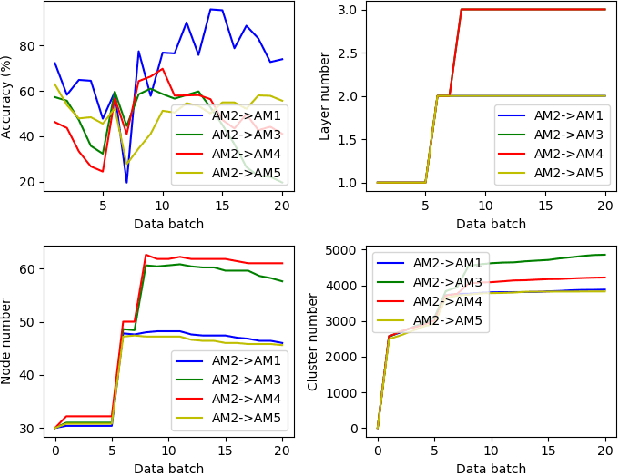
A cross domain multistream classification is a challenging problem calling for fast domain adaptations to handle different but related streams in never-ending and rapidly changing environments. Notwithstanding that existing multistream classifiers assume no labelled samples in the target stream, they still incur expensive labelling cost since they require fully labelled samples of the source stream. This paper aims to attack the problem of extreme label shortage in the cross domain multistream classification problems where only very few labelled samples of the source stream are provided before process runs. Our solution, namely Learning Streaming Process from Partial Ground Truth (LEOPARD), is built upon a flexible deep clustering network where its hidden nodes, layers and clusters are added and removed dynamically in respect to varying data distributions. A deep clustering strategy is underpinned by a simultaneous feature learning and clustering technique leading to clustering-friendly latent spaces. A domain adaptation strategy relies on the adversarial domain adaptation technique where a feature extractor is trained to fool a domain classifier classifying source and target streams. Our numerical study demonstrates the efficacy of LEOPARD where it delivers improved performances compared to prominent algorithms in 15 of 24 cases. Source codes of LEOPARD are shared in \url{https://github.com/wengweng001/LEOPARD.git} to enable further study.
Unsupervised Learning for Identifying High Eigenvector Centrality Nodes: A Graph Neural Network Approach
Nov 08, 2021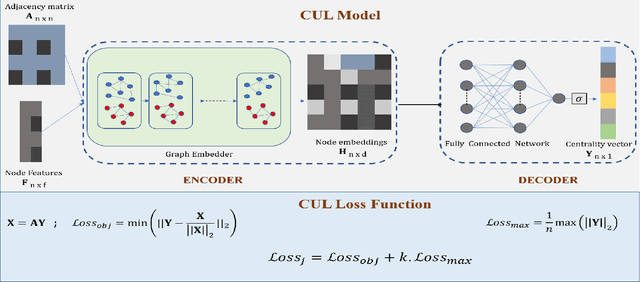
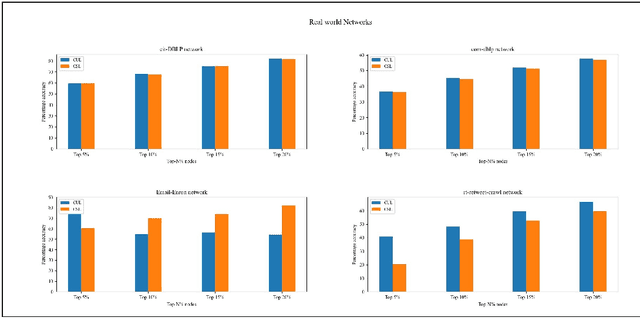

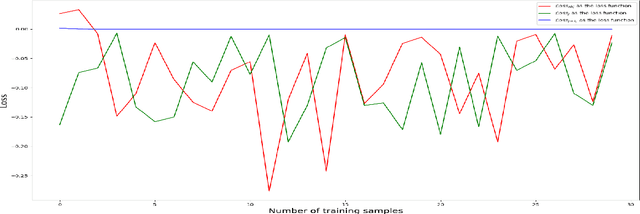
The existing methods to calculate the Eigenvector Centrality(EC) tend to not be robust enough for determination of EC in low time complexity or not well-scalable for large networks, hence rendering them practically unreliable/ computationally expensive. So, it is of the essence to develop a method that is scalable in low computational time. Hence, we propose a deep learning model for the identification of nodes with high Eigenvector Centrality. There have been a few previous works in identifying the high ranked nodes with supervised learning methods, but in real-world cases, the graphs are not labelled and hence deployment of supervised learning methods becomes a hazard and its usage becomes impractical. So, we devise CUL(Centrality with Unsupervised Learning) method to learn the relative EC scores in a network in an unsupervised manner. To achieve this, we develop an Encoder-Decoder based framework that maps the nodes to their respective estimated EC scores. Extensive experiments were conducted on different synthetic and real-world networks. We compared CUL against a baseline supervised method for EC estimation similar to some of the past works. It was observed that even with training on a minuscule number of training datasets, CUL delivers a relatively better accuracy score when identifying the higher ranked nodes than its supervised counterpart. We also show that CUL is much faster and has a smaller runtime than the conventional baseline method for EC computation. The code is available at https://github.com/codexhammer/CUL.
ACDC: Online Unsupervised Cross-Domain Adaptation
Oct 04, 2021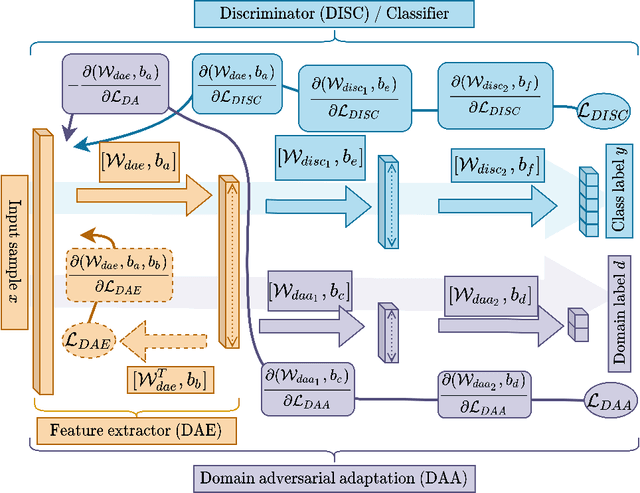
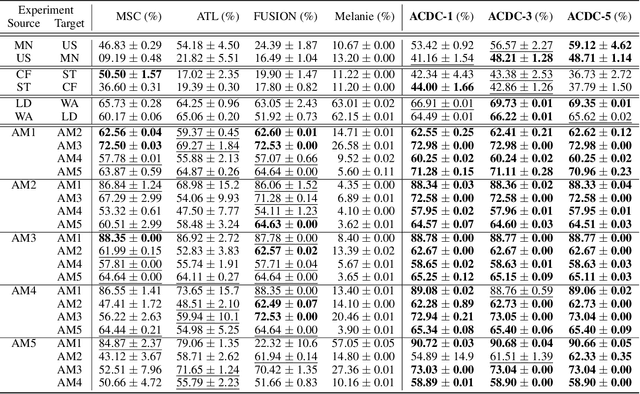
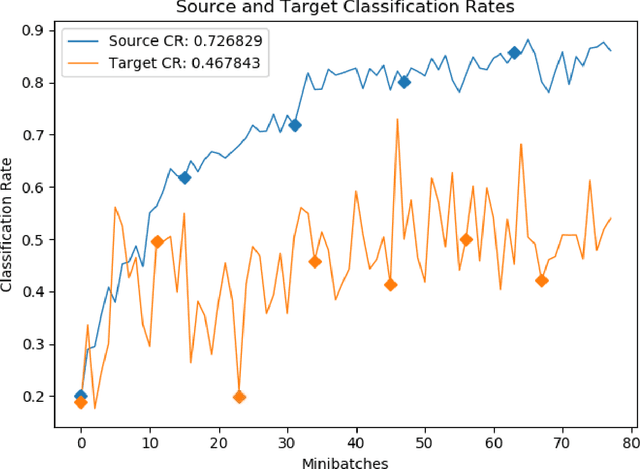
We consider the problem of online unsupervised cross-domain adaptation, where two independent but related data streams with different feature spaces -- a fully labeled source stream and an unlabeled target stream -- are learned together. Unique characteristics and challenges such as covariate shift, asynchronous concept drifts, and contrasting data throughput arises. We propose ACDC, an adversarial unsupervised domain adaptation framework that handles multiple data streams with a complete self-evolving neural network structure that reacts to these defiances. ACDC encapsulates three modules into a single model: A denoising autoencoder that extracts features, an adversarial module that performs domain conversion, and an estimator that learns the source stream and predicts the target stream. ACDC is a flexible and expandable framework with little hyper-parameter tunability. Our experimental results under the prequential test-then-train protocol indicate an improvement in target accuracy over the baseline methods, achieving more than a 10\% increase in some cases.
Unsupervised Continual Learning in Streaming Environments
Sep 20, 2021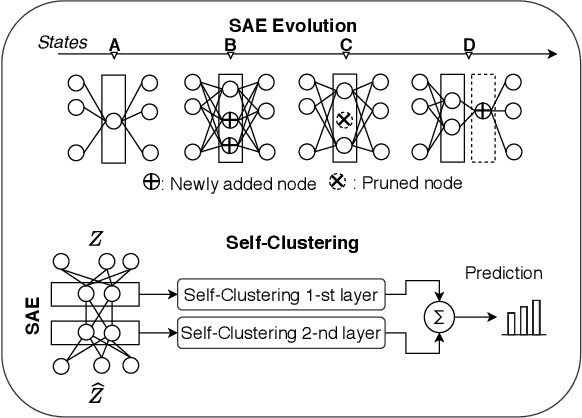
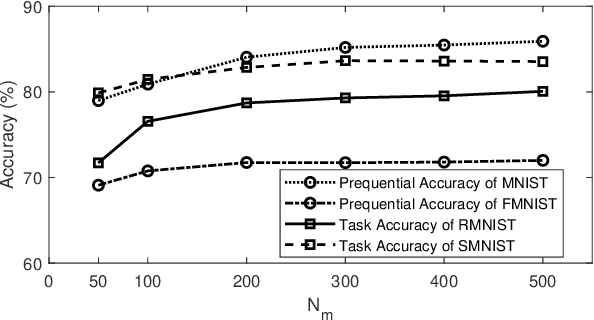
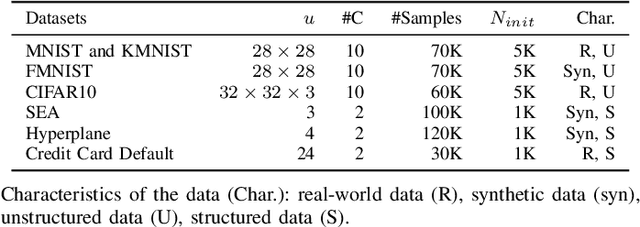
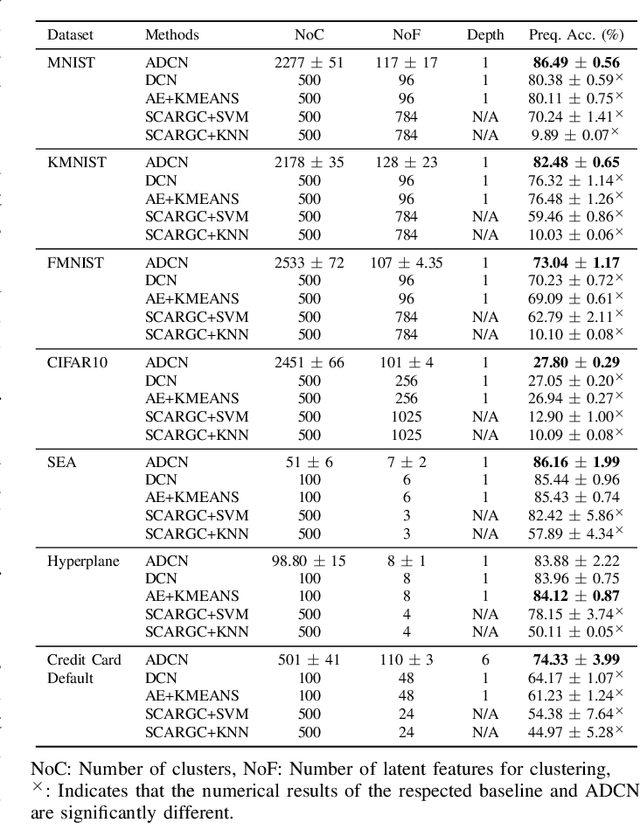
A deep clustering network is desired for data streams because of its aptitude in extracting natural features thus bypassing the laborious feature engineering step. While automatic construction of the deep networks in streaming environments remains an open issue, it is also hindered by the expensive labeling cost of data streams rendering the increasing demand for unsupervised approaches. This paper presents an unsupervised approach of deep clustering network construction on the fly via simultaneous deep learning and clustering termed Autonomous Deep Clustering Network (ADCN). It combines the feature extraction layer and autonomous fully connected layer in which both network width and depth are self-evolved from data streams based on the bias-variance decomposition of reconstruction loss. The self-clustering mechanism is performed in the deep embedding space of every fully connected layer while the final output is inferred via the summation of cluster prediction score. Further, a latent-based regularization is incorporated to resolve the catastrophic forgetting issue. A rigorous numerical study has shown that ADCN produces better performance compared to its counterparts while offering fully autonomous construction of ADCN structure in streaming environments with the absence of any labeled samples for model updates. To support the reproducible research initiative, codes, supplementary material, and raw results of ADCN are made available in \url{https://tinyurl.com/AutonomousDCN}.
Automatic Online Multi-Source Domain Adaptation
Sep 12, 2021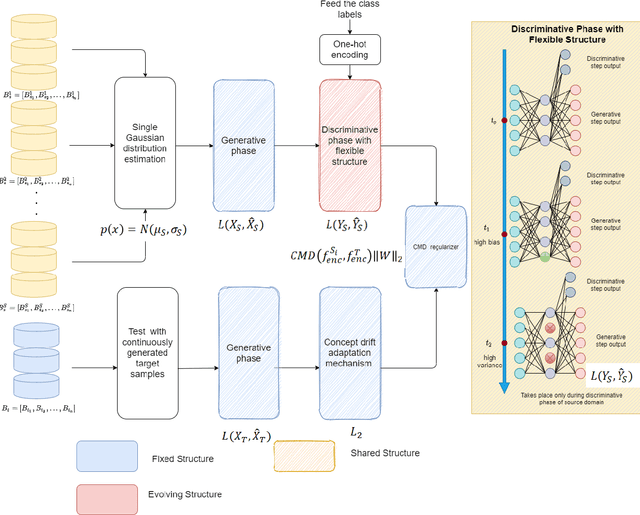
Knowledge transfer across several streaming processes remain challenging problem not only because of different distributions of each stream but also because of rapidly changing and never-ending environments of data streams. Albeit growing research achievements in this area, most of existing works are developed for a single source domain which limits its resilience to exploit multi-source domains being beneficial to recover from concept drifts quickly and to avoid the negative transfer problem. An online domain adaptation technique under multisource streaming processes, namely automatic online multi-source domain adaptation (AOMSDA), is proposed in this paper. The online domain adaptation strategy of AOMSDA is formulated under a coupled generative and discriminative approach of denoising autoencoder (DAE) where the central moment discrepancy (CMD)-based regularizer is integrated to handle the existence of multi-source domains thereby taking advantage of complementary information sources. The asynchronous concept drifts taking place at different time periods are addressed by a self-organizing structure and a node re-weighting strategy. Our numerical study demonstrates that AOMSDA is capable of outperforming its counterparts in 5 of 8 study cases while the ablation study depicts the advantage of each learning component. In addition, AOMSDA is general for any number of source streams. The source code of AOMSDA is shared publicly in https://github.com/Renchunzi-Xie/AOMSDA.git.
Unsupervised Continual Learning via Self-Adaptive Deep Clustering Approach
Jun 28, 2021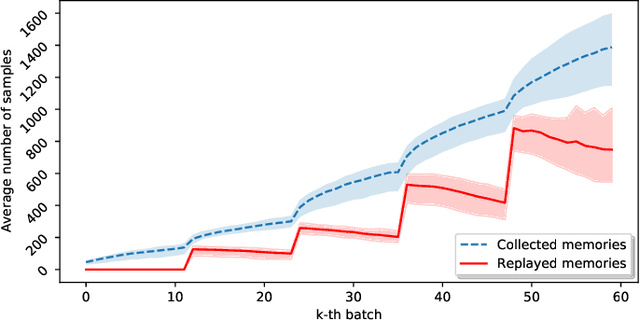
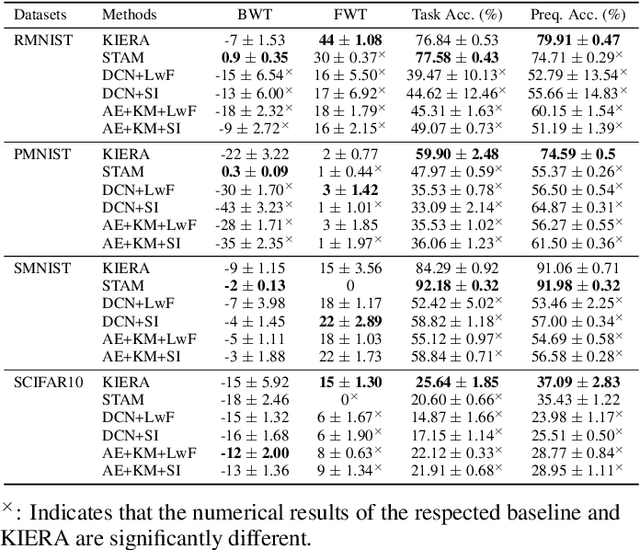
Unsupervised continual learning remains a relatively uncharted territory in the existing literature because the vast majority of existing works call for unlimited access of ground truth incurring expensive labelling cost. Another issue lies in the problem of task boundaries and task IDs which must be known for model's updates or model's predictions hindering feasibility for real-time deployment. Knowledge Retention in Self-Adaptive Deep Continual Learner, (KIERA), is proposed in this paper. KIERA is developed from the notion of flexible deep clustering approach possessing an elastic network structure to cope with changing environments in the timely manner. The centroid-based experience replay is put forward to overcome the catastrophic forgetting problem. KIERA does not exploit any labelled samples for model updates while featuring a task-agnostic merit. The advantage of KIERA has been numerically validated in popular continual learning problems where it shows highly competitive performance compared to state-of-the art approaches. Our implementation is available in \textit{\url{https://github.com/ContinualAL/KIERA}}.
Autonomous Deep Quality Monitoring in Streaming Environments
Jun 26, 2021
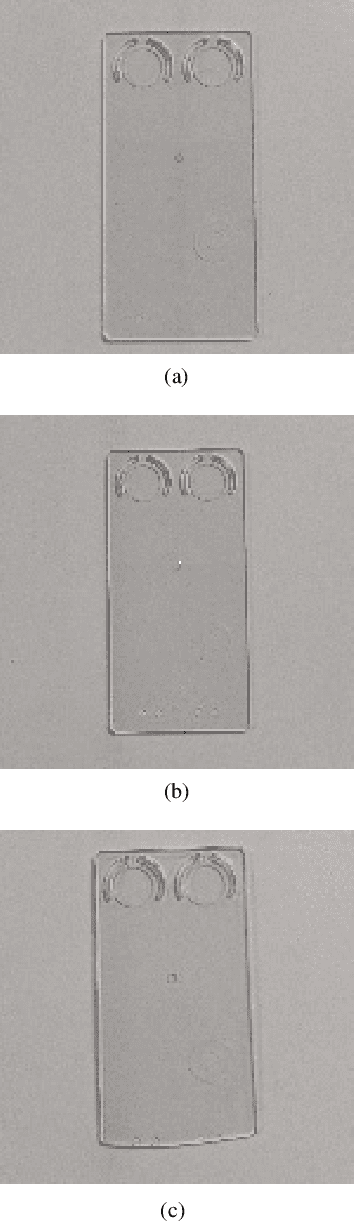
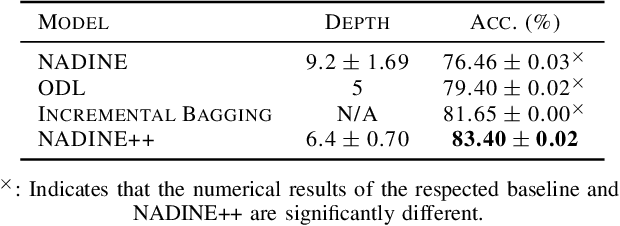
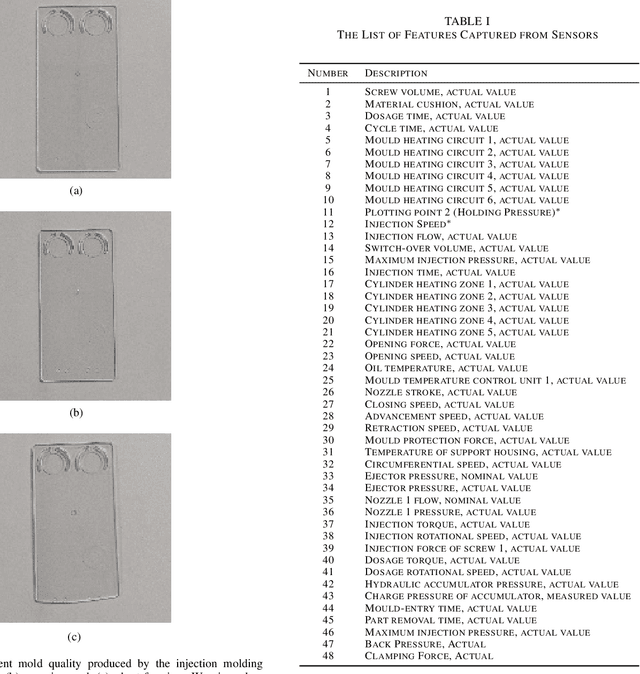
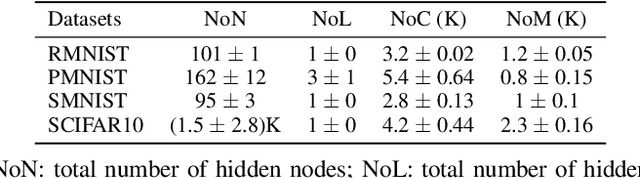
The common practice of quality monitoring in industry relies on manual inspection well-known to be slow, error-prone and operator-dependent. This issue raises strong demand for automated real-time quality monitoring developed from data-driven approaches thus alleviating from operator dependence and adapting to various process uncertainties. Nonetheless, current approaches do not take into account the streaming nature of sensory information while relying heavily on hand-crafted features making them application-specific. This paper proposes the online quality monitoring methodology developed from recently developed deep learning algorithms for data streams, Neural Networks with Dynamically Evolved Capacity (NADINE), namely NADINE++. It features the integration of 1-D and 2-D convolutional layers to extract natural features of time-series and visual data streams captured from sensors and cameras of the injection molding machines from our own project. Real-time experiments have been conducted where the online quality monitoring task is simulated on the fly under the prequential test-then-train fashion - the prominent data stream evaluation protocol. Comparison with the state-of-the-art techniques clearly exhibits the advantage of NADINE++ with 4.68\% improvement on average for the quality monitoring task in streaming environments. To support the reproducible research initiative, codes, results of NADINE++ along with supplementary materials and injection molding dataset are made available in \url{https://github.com/ContinualAL/NADINE-IJCNN2021}.
* This paper has been accepted for publication in IJCNN, 2021
Continual Learning via Inter-Task Synaptic Mapping
Jun 26, 2021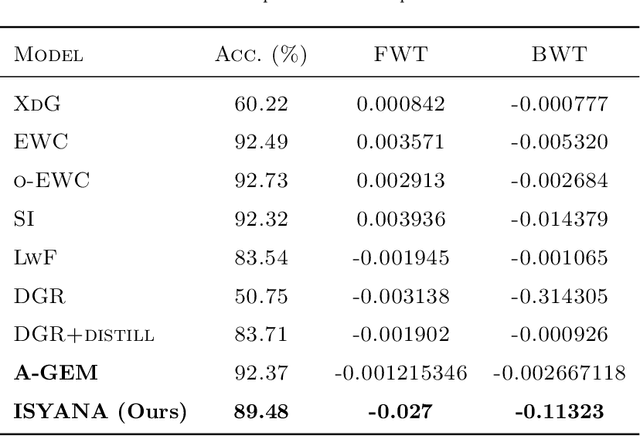
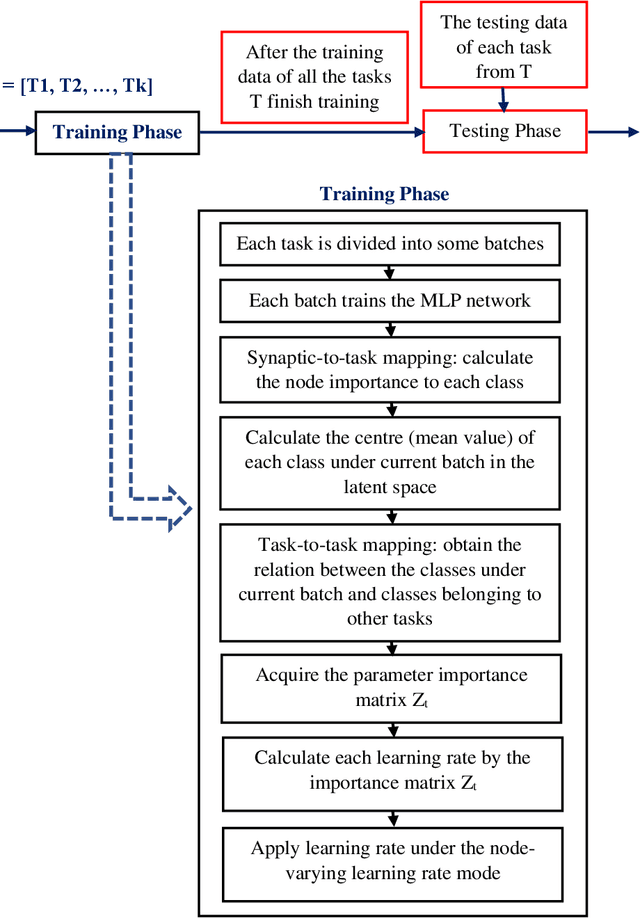
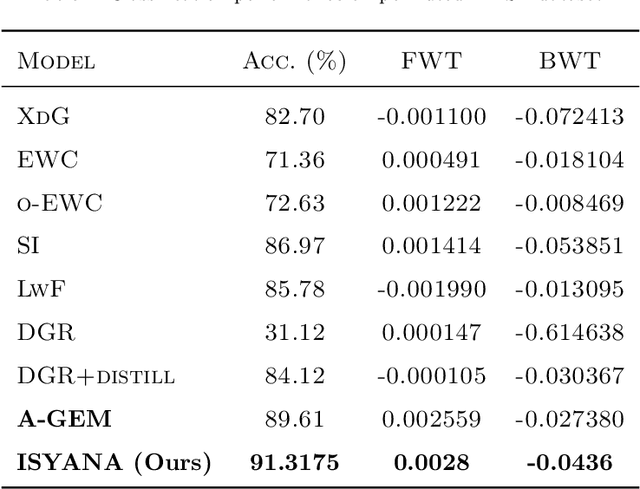
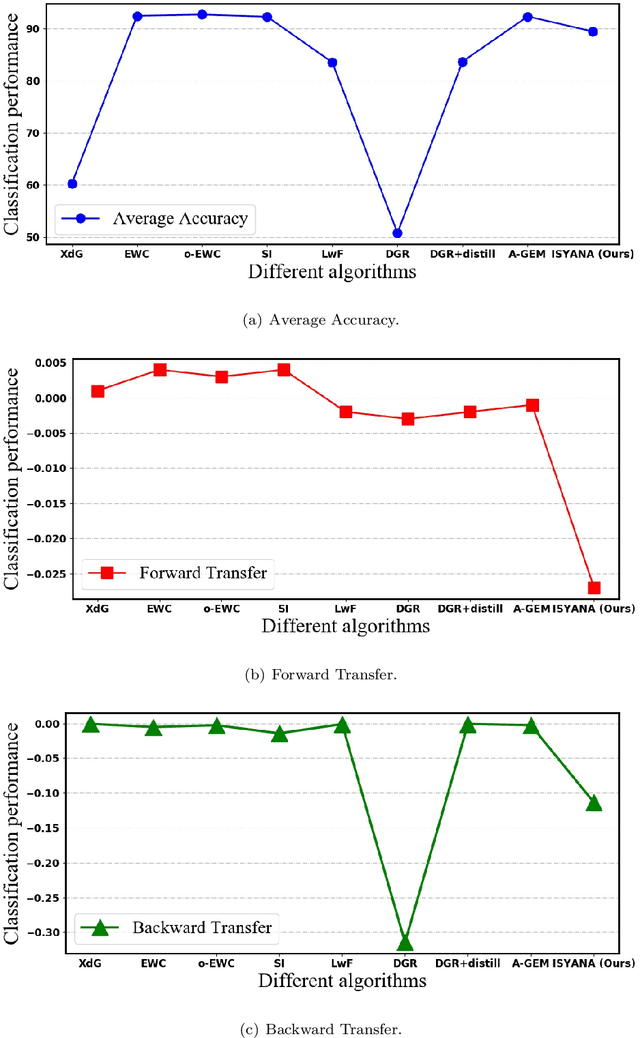
Learning from streaming tasks leads a model to catastrophically erase unique experiences it absorbs from previous episodes. While regularization techniques such as LWF, SI, EWC have proven themselves as an effective avenue to overcome this issue by constraining important parameters of old tasks from changing when accepting new concepts, these approaches do not exploit common information of each task which can be shared to existing neurons. As a result, they do not scale well to large-scale problems since the parameter importance variables quickly explode. An Inter-Task Synaptic Mapping (ISYANA) is proposed here to underpin knowledge retention for continual learning. ISYANA combines task-to-neuron relationship as well as concept-to-concept relationship such that it prevents a neuron to embrace distinct concepts while merely accepting relevant concept. Numerical study in the benchmark continual learning problems has been carried out followed by comparison against prominent continual learning algorithms. ISYANA exhibits competitive performance compared to state of the arts. Codes of ISYANA is made available in \url{https://github.com/ContinualAL/ISYANAKBS}.
* This paper has been published in Knowledge-based Systems
Scalable Teacher Forcing Network for Semi-Supervised Large Scale Data Streams
Jun 26, 2021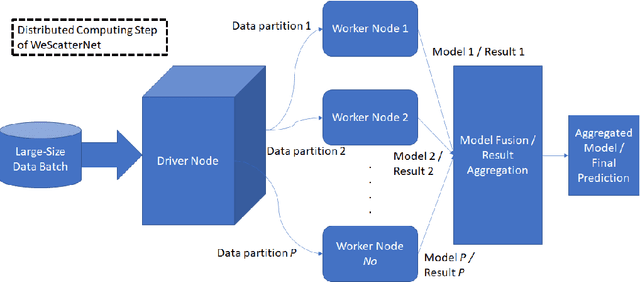
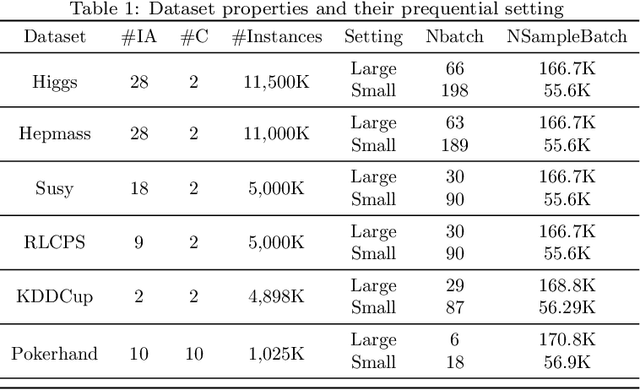
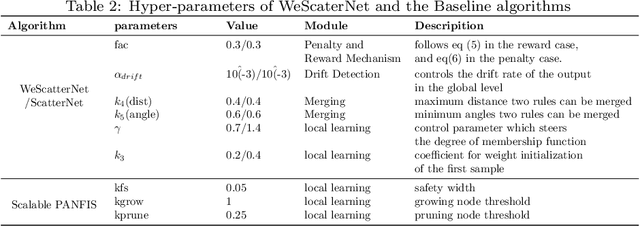
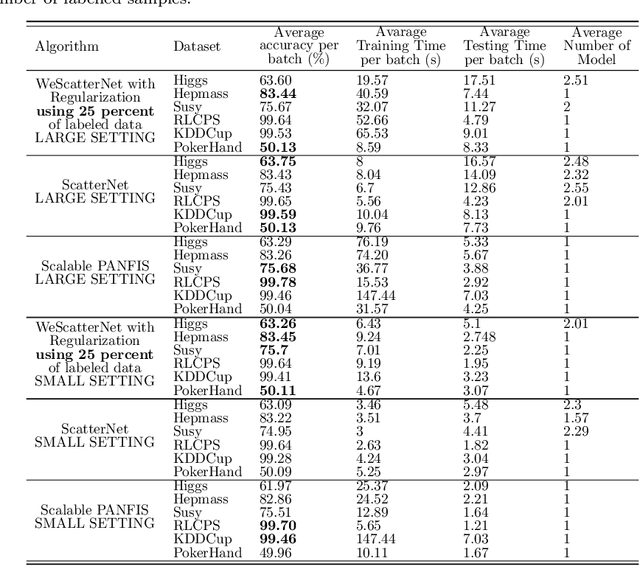
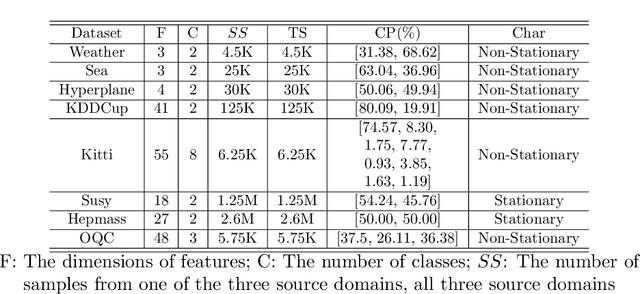
The large-scale data stream problem refers to high-speed information flow which cannot be processed in scalable manner under a traditional computing platform. This problem also imposes expensive labelling cost making the deployment of fully supervised algorithms unfeasible. On the other hand, the problem of semi-supervised large-scale data streams is little explored in the literature because most works are designed in the traditional single-node computing environments while also being fully supervised approaches. This paper offers Weakly Supervised Scalable Teacher Forcing Network (WeScatterNet) to cope with the scarcity of labelled samples and the large-scale data streams simultaneously. WeScatterNet is crafted under distributed computing platform of Apache Spark with a data-free model fusion strategy for model compression after parallel computing stage. It features an open network structure to address the global and local drift problems while integrating a data augmentation, annotation and auto-correction ($DA^3$) method for handling partially labelled data streams. The performance of WeScatterNet is numerically evaluated in the six large-scale data stream problems with only $25\%$ label proportions. It shows highly competitive performance even if compared with fully supervised learners with $100\%$ label proportions.
* This paper has been accepted for publication in Information Sciences