 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePassive Obstacle Aware Control to Follow Desired Velocities
May 09, 2024



Evaluating and updating the obstacle avoidance velocity for an autonomous robot in real-time ensures robustness against noise and disturbances. A passive damping controller can obtain the desired motion with a torque-controlled robot, which remains compliant and ensures a safe response to external perturbations. Here, we propose a novel approach for designing the passive control policy. Our algorithm complies with obstacle-free zones while transitioning to increased damping near obstacles to ensure collision avoidance. This approach ensures stability across diverse scenarios, effectively mitigating disturbances. Validation on a 7DoF robot arm demonstrates superior collision rejection capabilities compared to the baseline, underlining its practicality for real-world applications. Our obstacle-aware damping controller represents a substantial advancement in secure robot control within complex and uncertain environments.
Avoidance of Concave Obstacles through Rotation of Nonlinear Dynamics
Jun 28, 2023



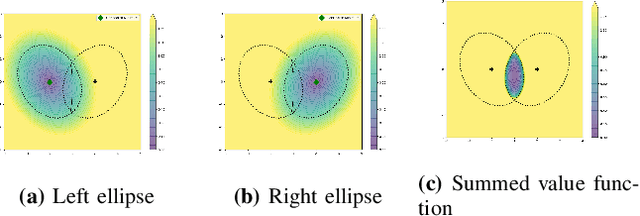
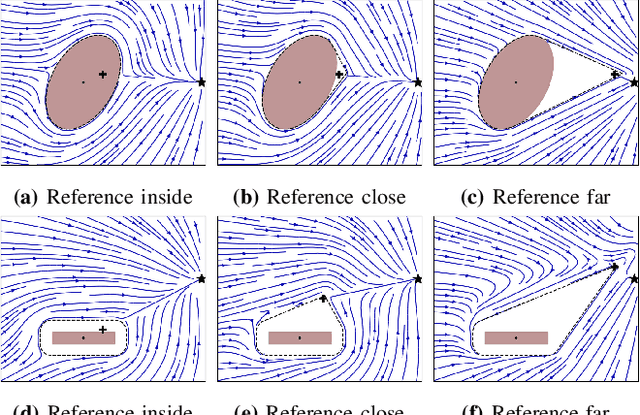
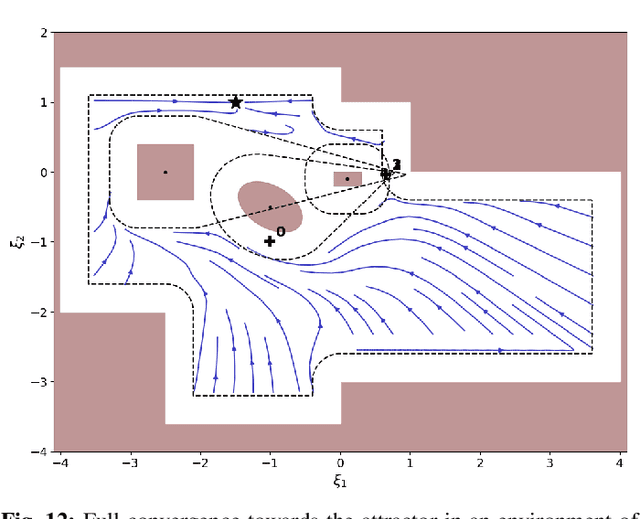
Controlling complex tasks in robotic systems, such as circular motion for cleaning or following curvy lines, can be dealt with using nonlinear vector fields. In this paper, we introduce a novel approach called rotational obstacle avoidance method (ROAM) for adapting the initial dynamics when the workspace is partially occluded by obstacles. ROAM presents a closed-form solution that effectively avoids star-shaped obstacles in spaces of arbitrary dimensions by rotating the initial dynamics towards the tangent space. The algorithm enables navigation within obstacle hulls and can be customized to actively move away from surfaces, while guaranteeing the presence of only a single saddle point on the boundary of each obstacle. We introduce a sequence of mappings to extend the approach for general nonlinear dynamics. Moreover, ROAM extends its capabilities to handle multi-obstacle environments and provides the ability to constrain dynamics within a safe tube. By utilizing weighted vector-tree summation, we successfully navigate around general concave obstacles represented as a tree-of-stars. Through experimental evaluation, ROAM demonstrates superior performance in terms of minimizing occurrences of local minima and maintaining similarity to the initial dynamics, outperforming existing approaches in multi-obstacle simulations. The proposed method is highly reactive, owing to its simplicity, and can be applied effectively in dynamic environments. This was demonstrated during the collision-free navigation of a 7 degree-of-freedom robot arm around dynamic obstacles
From Obstacle Avoidance To Motion Learning Using Local Rotation of Dynamical Systems
Oct 26, 2022



In robotics motion is often described from an external perspective, i.e., we give information on the obstacle motion in a mathematical manner with respect to a specific (often inertial) reference frame. In the current work, we propose to describe the robotic motion with respect to the robot itself. Similar to how we give instructions to each other (go straight, and then after multiple meters move left, and then a sharp turn right.), we give the instructions to a robot as a relative rotation. We first introduce an obstacle avoidance framework that allows avoiding star-shaped obstacles while trying to stay close to an initial (linear or nonlinear) dynamical system. The framework of the local rotation is extended to motion learning. Automated clustering defines regions of local stability, for which the precise dynamics are individually learned. The framework has been applied to the LASA-handwriting dataset and shows promising results.
Fast Obstacle Avoidance Based on Real-Time Sensing
May 10, 2022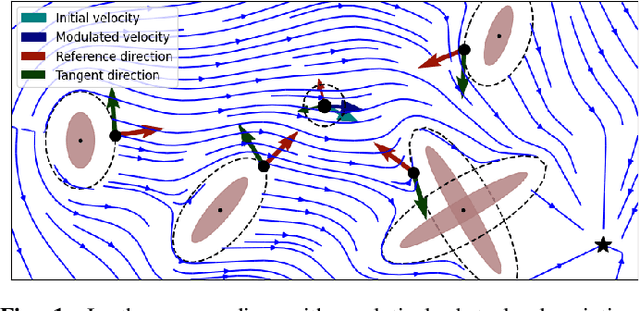
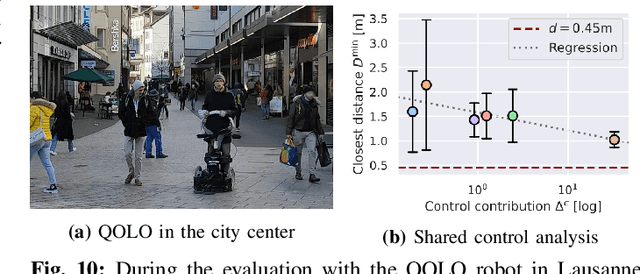
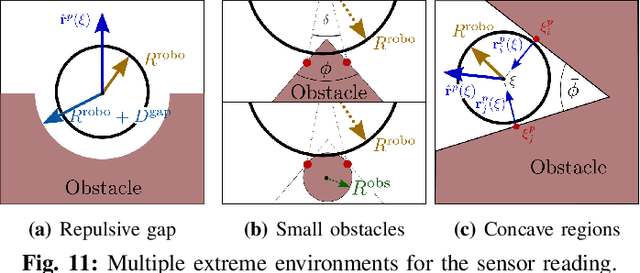
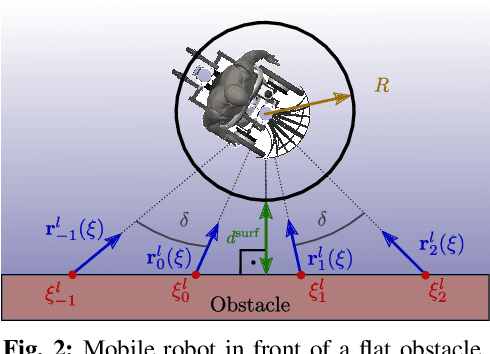
Humans are remarkable at navigating and moving through dynamic and complex spaces, such as crowded streets. For robots to do the same, it is crucial that they are endowed with highly reactive obstacle avoidance robust to partial and poor sensing. We address the issue of enabling obstacle avoidance based on sparse and asynchronous perception. The proposed control scheme combines a high-level input command provided by either a planner or a human operator with fast reactive obstacle avoidance. The sampling-based sensor data can be combined with an analytical reconstruction of the obstacles for real-time collision avoidance. We can ensure that the agent does not get stuck when a feasible path exists between obstacles. The algorithm was evaluated experimentally on static laser data from cluttered, indoor office environments. Additionally, it was used in a shared control mode in a dynamic and complex outdoor environment in the center of Lausanne. The proposed control scheme successfully avoided collisions in both scenarios. During the experiments, the controller on the onboard computer took 1 millisecond to evaluate over 30000 data points.
Avoiding Dense and Dynamic Obstacles in Enclosed Spaces: Application to Moving in Crowds
Jun 04, 2021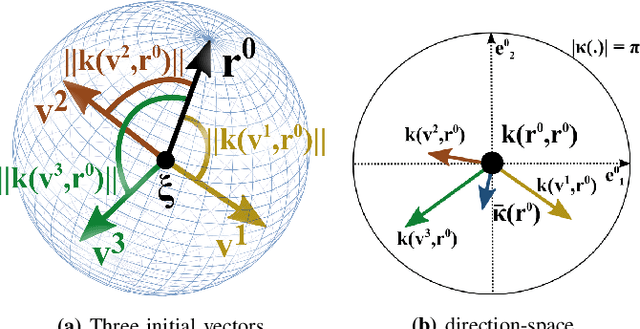
This paper presents a closed-form approach to constrain a flow within a given volume and around objects. The flow is guaranteed to converge and to stop at a single fixed point. We show that the obstacle avoidance problem can be inverted to enforce that the flow remains enclosed within a volume defined by a polygonal surface. We formally guarantee that such a flow will never contact the boundaries of the enclosing volume and obstacles, and will asymptotically converge towards an attractor. We further create smooth motion fields around obstacles with edges (e.g. tables). Both obstacles and enclosures may be time-varying, i.e. moving, expanding and shrinking. The technique enables a robot to navigate within an enclosed corridor while avoiding static and moving obstacles. It was applied on an autonomous robot (QOLO) in a static complex indoor environment, and also tested in simulations with dense crowds. The final proof of concept was performed in an outdoor environment in Lausanne. The QOLO-robot successfully traversed a marketplace in the center of town in presence of a diverse crowd with a non-uniform motion pattern.
An Analysis by Synthesis Approach for Automatic Vertebral Shape Identification in Clinical QCT
Dec 03, 2018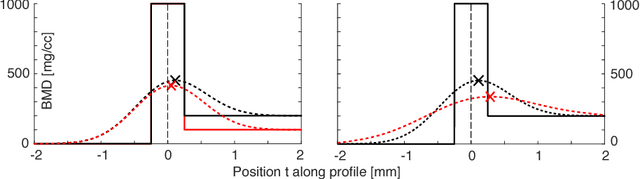

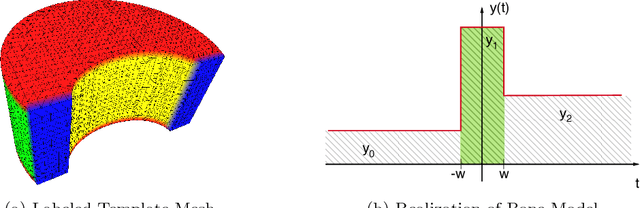
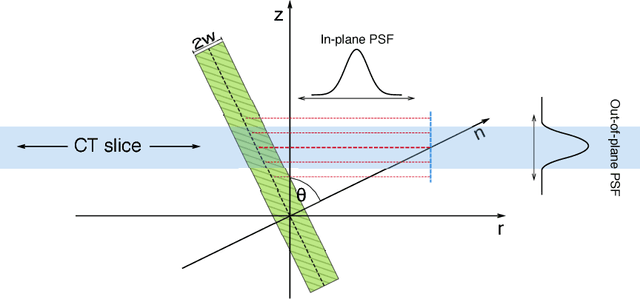
Quantitative computed tomography (QCT) is a widely used tool for osteoporosis diagnosis and monitoring. The assessment of cortical markers like cortical bone mineral density (BMD) and thickness is a demanding task, mainly because of the limited spatial resolution of QCT. We propose a direct model based method to automatically identify the surface through the center of the cortex of human vertebra. We develop a statistical bone model and analyze its probability distribution after the imaging process. Using an as-rigid-as-possible deformation we find the cortical surface that maximizes the likelihood of our model given the input volume. Using the European Spine Phantom (ESP) and a high resolution \mu CT scan of a cadaveric vertebra, we show that the proposed method is able to accurately identify the real center of cortex ex-vivo. To demonstrate the in-vivo applicability of our method we use manually obtained surfaces for comparison.