 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParticle robots A new specie of hybrid bio-inspired robotics
Feb 15, 2020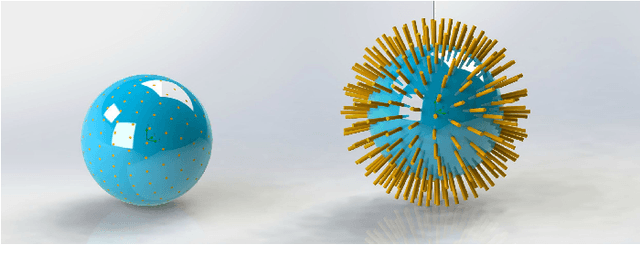
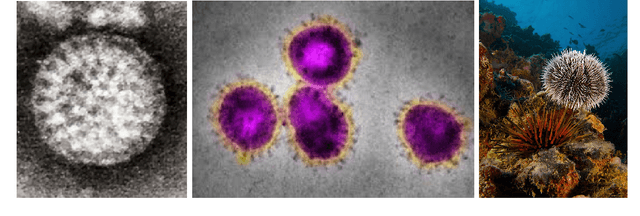
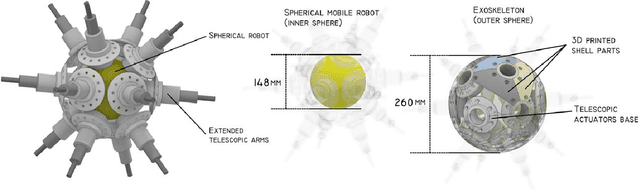
Inspired by a couple of simple organisms without eyes, neither ears. This paper presents a novel hybrid bionic robot, called "particle robot", which mix a macro-organism and a micro-organism in the same robot. On one hand, an interesting rather boring animal, the biological Echinoids (sea urchins) is mixed with the viruses micro-organisms, in specific the rotaviruses; together with spherical mobile robots. Analogously, from a pure robotic perspective, this bio-inspired robot can be seen as a spherical mobile robot wearing an actuated exoskeleton. The robot has two main configurations: when the spines are contracted it becomes a spherical mobile robot able to move in a fast pace on land, embedding all spherical mobile robots properties. On the other hand, when the spines or legs are extended in a controlled pattern, it can walk on flat surfaces as well as move on snow and over rocks as a bionic sea urchin. The spines of the robot are telescopic linear actuators, which combines soft and hard 3D print materials to make the actuation unit flexible for compressing it in minimal space and rigid for lifting the robot.
Bio-inspired Adaptive Latching System for Towing and Guiding Power-less Floating Platforms with Autonomous Robotic Boats
Feb 03, 2020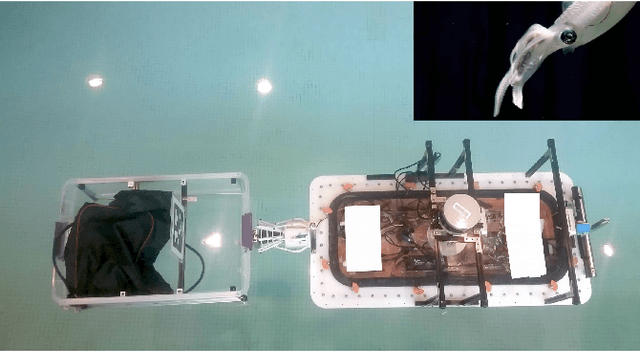
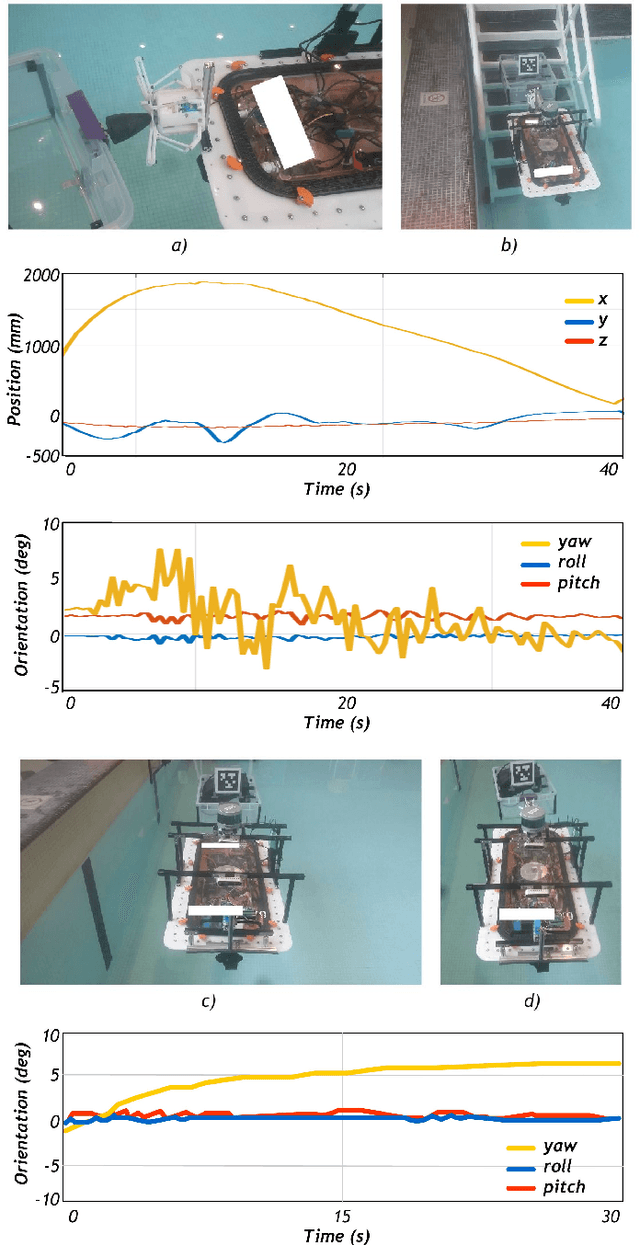
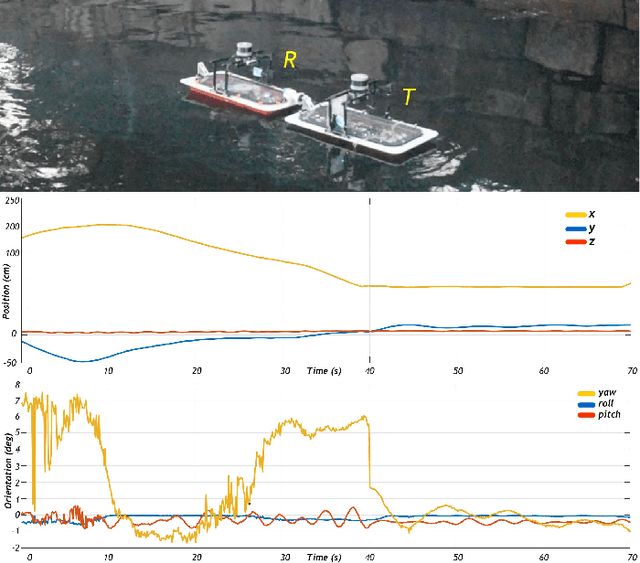
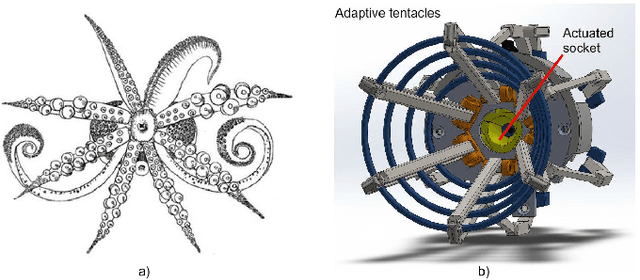
Autonomous robotic boats are expected to perform several tasks: 1) navigate autonomously in water environments, such as the canals of Amsterdam; 2) perform individual task, such as water monitoring, transporting goods and people; 3) latch together to create floating infrastructure, such as bridges and markets. In this paper we present a novel bio-inspired robotic system for latching, towing and guiding a floating passive-power-less platform. The challenge is to design an adaptive latching mechanism, able to create a secure connection between the entities, easy to attach/detach, even if the boats are affected by water disturbances. But most important, the adaptive latching must be able to restricting the DoF (degrees of freedom) of the latched "dummy" platform. Since, the robotic boat may drive it in narrow water canals and must prevent it from drifting and hitting the wall. This novel adaptive latching mechanism is based on the ball and socket joint that allows rotation and free movements in two planes at the same time. It consists of two parts: the male part that includes a bearing stud (ball) integrated on the floating bin "dummy" and the female part located on the autonomous robotic boat. Which integrates an adaptive framed funnel to guide the male ball into an actuated receptor that traps the ball, creating the ball-socket joint between the boats. In this sense, the adaptive latching mechanism mimics squid's tentacles that can adjust the forces applied to a holding object restricting its degrees of freedom. Experimental results are presented from our swarm robotic boats integrating the adaptive latching system and performing the towing and guiding use cases.
AprilTags 3D: Dynamic Fiducial Markers for Robust Pose Estimation in Highly Reflective Environments and Indirect Communication in Swarm Robotics
Jan 11, 2020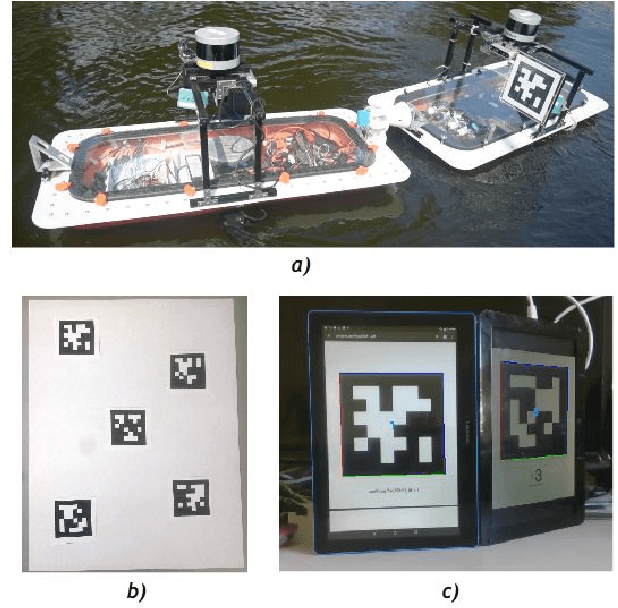
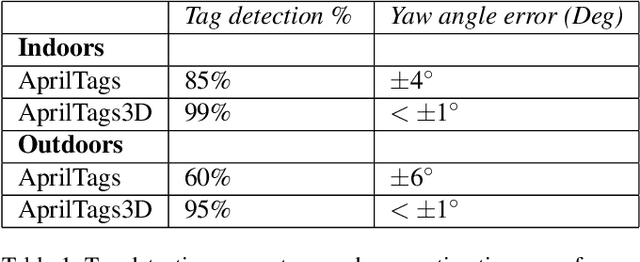
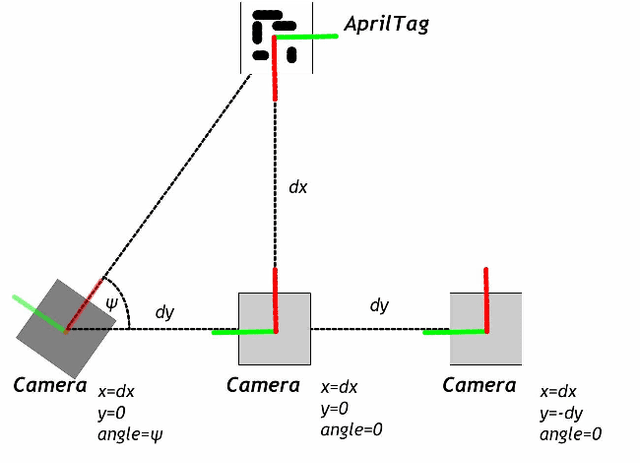
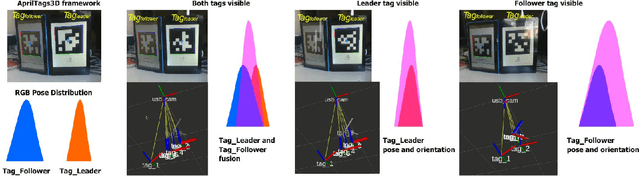
Although fiducial markers give an accurate pose estimation in laboratory conditions, where the noisy factors are controlled, using them in field robotic applications remains a challenge. This is constrained to the fiducial maker systems, since they only work within the RGB image space. As a result, noises in the image produce large pose estimation errors. In robotic applications, fiducial markers have been mainly used in its original and simple form, as a plane in a printed paper sheet. This setup is sufficient for basic visual servoing and augmented reality applications, but not for complex swarm robotic applications in which the setup consists of multiple dynamic markers (tags displayed on LCD screen). This paper describes a novel methodology, called AprilTags3D, that improves pose estimation accuracy of AprilTags in field robotics with only RGB sensor by adding a third dimension to the marker detector. Also, presents experimental results from applying the proposed methodology to swarm autonomous robotic boats for latching between them and for creating robotic formations.
Bionic Sea Urchin Robot with Foldable Telescopic Actuator
Jan 06, 2020
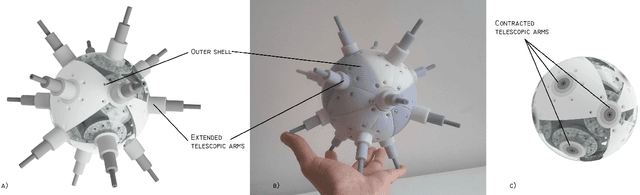
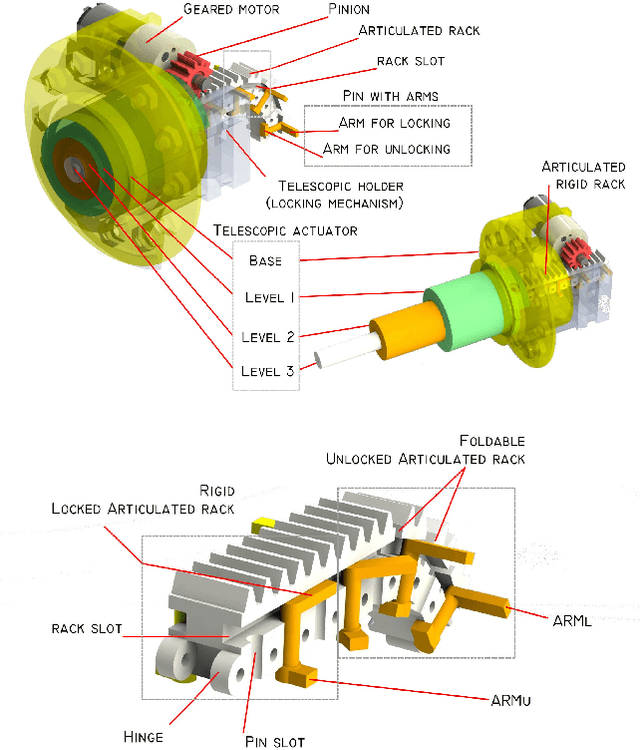
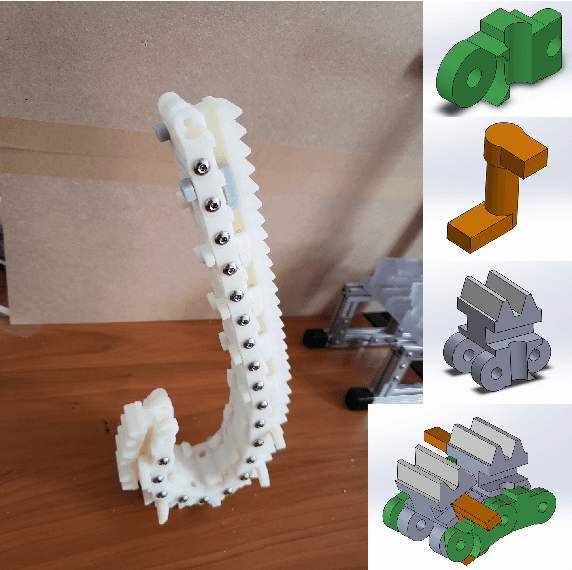
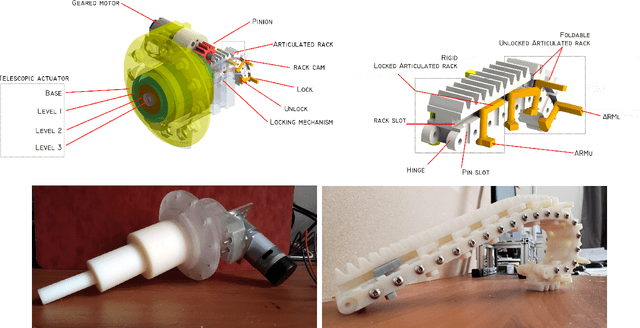
This paper presents a couple of interesting ideas: a telescopic actuator design and a bio-inspired sea urchin robot. The "spines" of the sea urchin robot consist of fourteen telescopic actuators equally distributed over it's spherical body. The telescopic actuation system integrates linked 3D printed rack articulations that are locked in all axes if the pinion moves the links in a forward direction, creating a solid and rigid rack. Thus, the robot is able to propel and move by extending its spines. On the other hand, if the pinion moves the rigid articulations backward, these are unlocked and can be folded in a minimal space, enabling the bionic sea urchin robot to hide its spines inside its constrained spherical-body and be able to roll. Simulations and experiments are presented from both, the sea urchin robotic prototype and different scales of the telescopic actuation system.
In-pipe Robotic System for Pipe-joint Rehabilitation in Fresh Water Pipes
Dec 06, 2019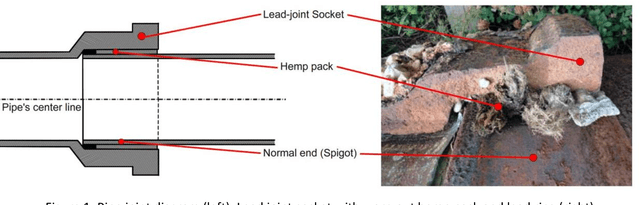
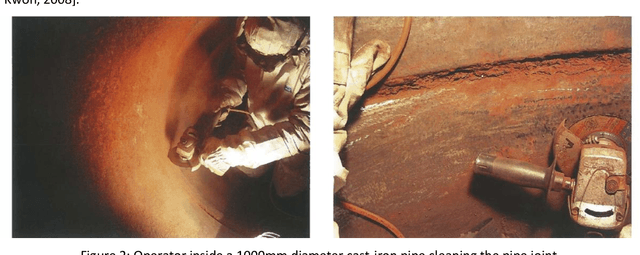

The robot's objective is to rehabilitate the pipe joints of fresh water supply systems by crawling into water canals and applying a restoration material to repair the pipes. The robot's structure consists of six wheeled-legs, three on the front separated 120{\deg} and three on the back in the same configuration, supporting the structure along the centre of the pipe. In this configuration the robot is able to clean and seal with a rotating tool, similar to a cylindrical robot, covering the entire 3D in-pipe space.
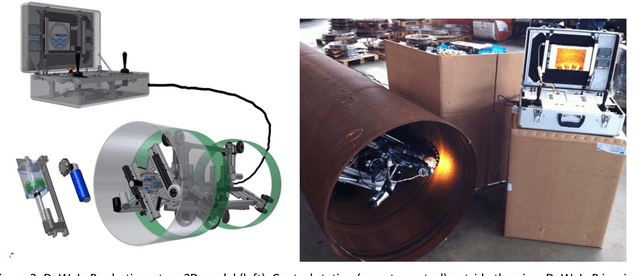
LaMMos - Latching Mechanism based on Motorized-screw for Reconfigurable Robots and Exoskeleton Suits
Dec 27, 2017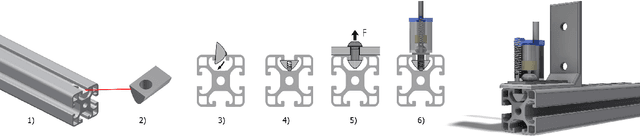
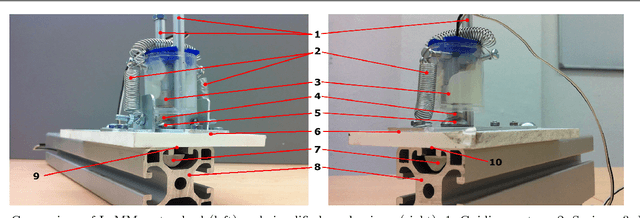
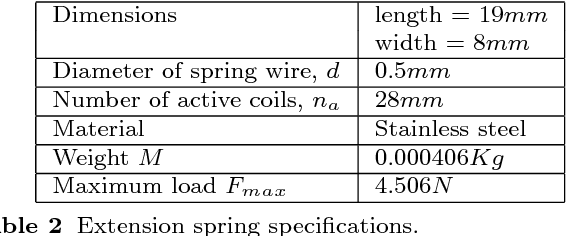
Reconfigurable robots refer to a category of robots that their components (individual joints and links) can be assembled in multiple configurations and geometries. Most of existing latching mechanisms are based on physical tools such as hooks, cages or magnets, which limit the payload capacity. Therefore, robots re- quire a latching mechanism which can help to reconfigure itself without sacrificing the payload capability. This paper presents a latching mechanism based on the flexible screw attaching principle. In which, actuators are used to move the robot links and joints while connecting them with a motorized-screw and dis- connecting them by unfastening the screw. The brackets used in our mechanism configuration helps to hold maximum force up to 5000N. The LaMMos - Latching Mechanism based on Motorized- screw has been applied to the DeWaLoP - Developing Water Loss Prevention in-pipe robot. It helps the robot to shrink its body to crawl into the pipe with minimum diameter, by recon- figuring the leg positions. And it helps to recover the legs positions to original status once the robot is inside the pipe. Also, LaMMos add stiffness to the robot legs by dynamically integrate them to the structure. Additionally, we present an application of the LaMMos mechanism to exoskeleton suits, for easing the mo- tors from the joints when carrying heavy weights for long periods of time. This mechanism offers many interesting opportunities for robotics research in terms of functionality, pay- load and size.
Characterizing Lifting and Lowering Activities with Insole FSR sensors in Industrial Exoskeletons
Jun 16, 2017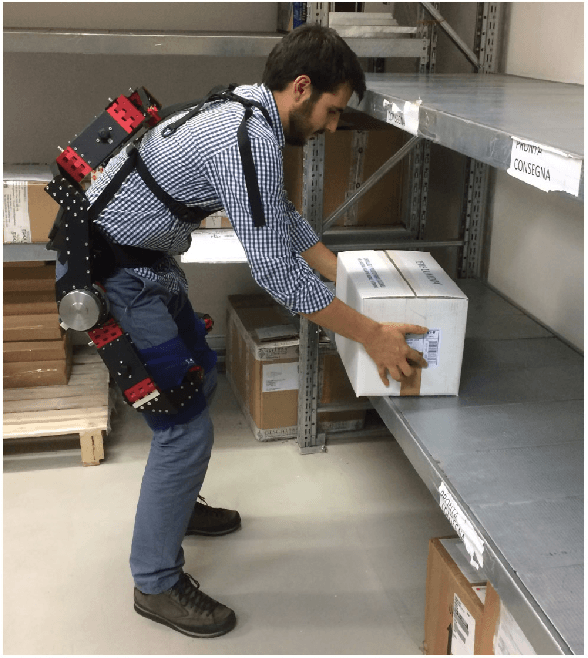

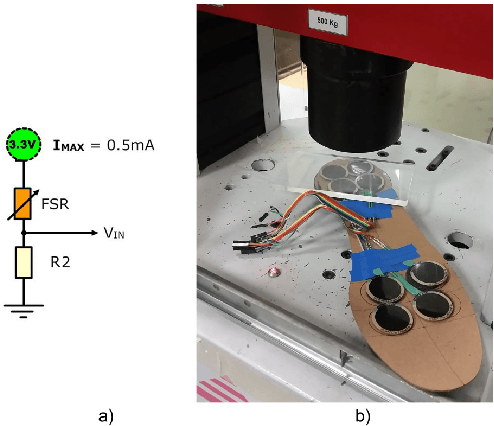
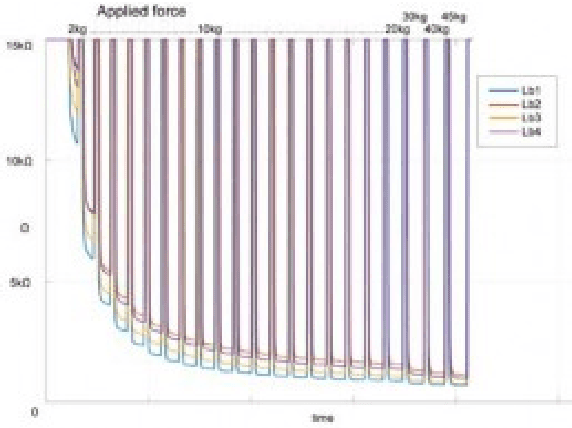
This paper presents an insole FSR (Force Sensing Resistor) to dynamically detect weight variations in an exoskeleton system. The proposed methodology is intended for tasks of lifting and lowering heavy weights with an industrial exoskeleton to substantially reduce spinal loads during these manual handling activities. Instead of extensively placing high-dense force sensors by covering the whole plantar area, as most of commercial applications do, we integrate only a few force sensors in specific plantar area, so that the sensory system is not restricted to an individual foot size and shape, and on the other hand has relatively lower material cost. Industrial exoskeletons are intended to assist workers when handling heavy goods. With this in mind, wearers are not able to use their hands to control the exoskeleton since they use them to handle the goods. Therefore, the exoskeleton controller is required to indirectly infer how much and when the wearer requires assistance for lifting or lowering a heavy weight. Our approach of dynamically detect and characterize the increment/decrement of weight, as well as the rising/falling edge, enables the exoskeleton's controller to trigger the request of assistive force to the actuators.