Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-pipe Robotic System for Pipe-joint Rehabilitation in Fresh Water Pipes
Paper and Code
Dec 06, 2019
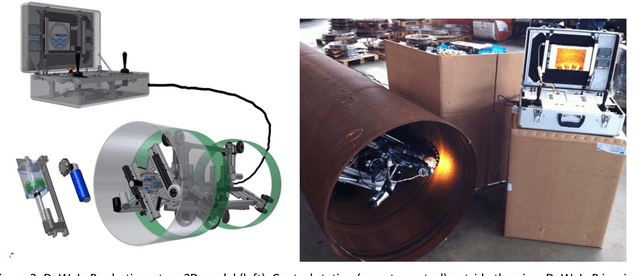

The robot's objective is to rehabilitate the pipe joints of fresh water supply systems by crawling into water canals and applying a restoration material to repair the pipes. The robot's structure consists of six wheeled-legs, three on the front separated 120{\deg} and three on the back in the same configuration, supporting the structure along the centre of the pipe. In this configuration the robot is able to clean and seal with a rotating tool, similar to a cylindrical robot, covering the entire 3D in-pipe space.
* 6 pages, 5 figures
View paper on