 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Optimization for Robust Humanoid Locomotion with Sample-Efficient Learning
Jun 09, 2019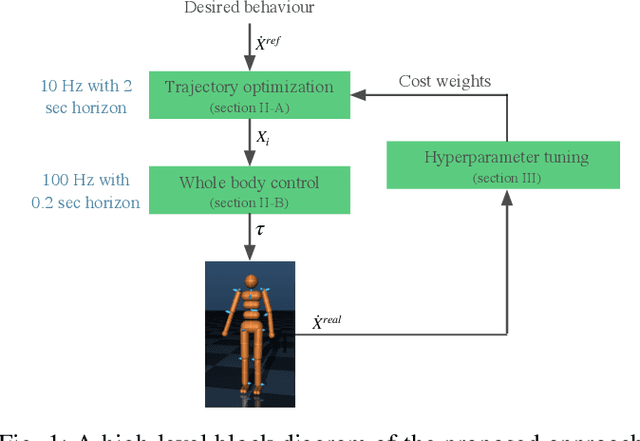
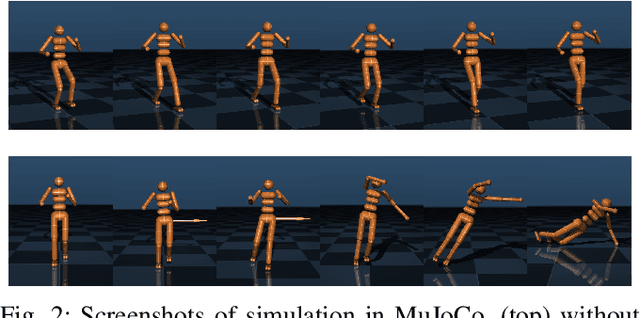
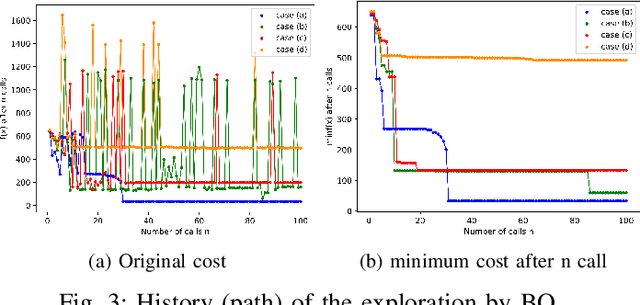
Trajectory optimization (TO) is one of the most powerful tools for generating feasible motions for humanoid robots. However, including uncertainties and stochasticity in the TO problem to generate robust motions can easily lead to an interactable problem. Furthermore, since the models used in the TO have always some level of abstraction, it is hard to find a realistic set of uncertainty in the space of abstract model. In this paper we aim at leveraging a sample-efficient learning technique (Bayesian optimization) to robustify trajectory optimization for humanoid locomotion. The main idea is to use Bayesian optimization to find the optimal set of cost weights which compromises performance with respect to robustness with a few realistic simulation/experiment. The results show that the proposed approach is able to generate robust motions for different set of disturbances and uncertainties.
Curious iLQR: Resolving Uncertainty in Model-based RL
Apr 15, 2019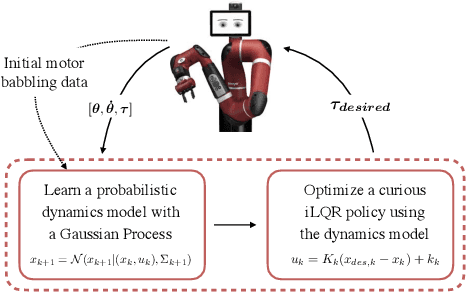
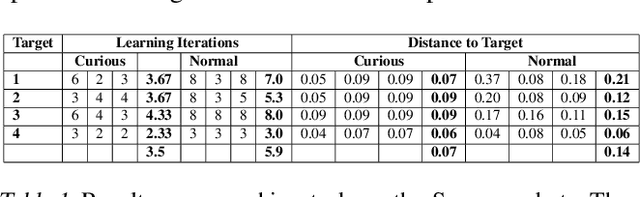
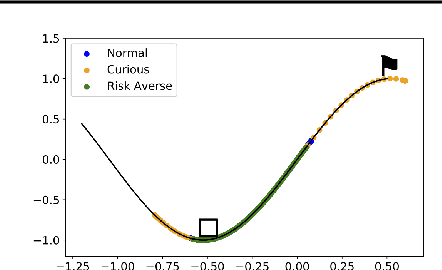
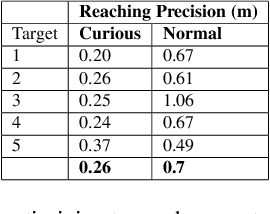
Curiosity as a means to explore during reinforcement learning problems has recently become very popular. However, very little progress has been made in utilizing curiosity for learning control. In this work, we propose a model-based reinforcement learning (MBRL) framework that combines Bayesian modeling of the system dynamics with curious iLQR, a risk-seeking iterative LQR approach. During trajectory optimization the curious iLQR attempts to minimize both the task-dependent cost and the uncertainty in the dynamics model. We scale this approach to perform reaching tasks on 7-DoF manipulators, to perform both simulation and real robot reaching experiments. Our experiments consistently show that MBRL with curious iLQR more easily overcomes bad initial dynamics models and reaches desired joint configurations more reliably and with less system rollouts.
Efficient Humanoid Contact Planning using Learned Centroidal Dynamics Prediction
Mar 01, 2019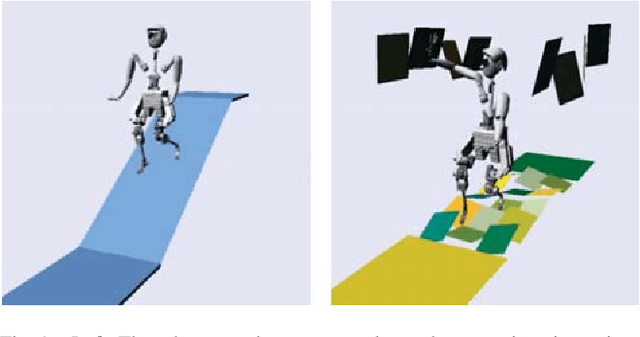
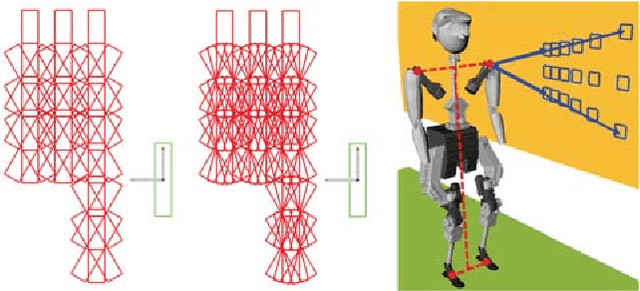
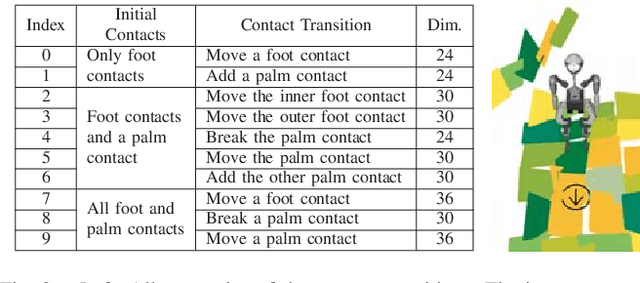
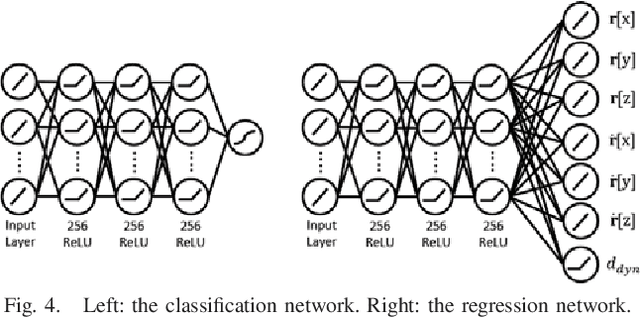
Humanoid robots dynamically navigate an environment by interacting with it via contact wrenches exerted at intermittent contact poses. Therefore, it is important to consider dynamics when planning a contact sequence. Traditional contact planning approaches assume a quasi-static balance criterion to reduce the computational challenges of selecting a contact sequence over a rough terrain. This however limits the applicability of the approach when dynamic motions are required, such as when walking down a steep slope or crossing a wide gap. Recent methods overcome this limitation with the help of efficient mixed integer convex programming solvers capable of synthesizing dynamic contact sequences. Nevertheless, its exponential-time complexity limits its applicability to short time horizon contact sequences within small environments. In this paper, we go beyond current approaches by learning a prediction of the dynamic evolution of the robot centroidal momenta, which can then be used for quickly generating dynamically robust contact sequences for robots with arms and legs using a search-based contact planner. We demonstrate the efficiency and quality of the results of the proposed approach in a set of dynamically challenging scenarios.
Leveraging Contact Forces for Learning to Grasp
Sep 19, 2018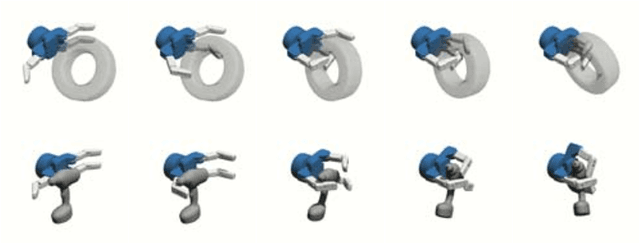
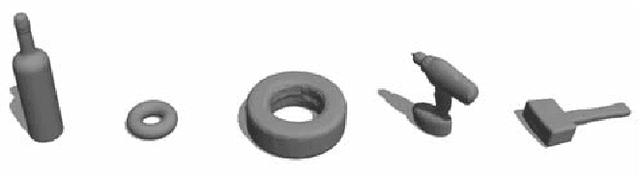
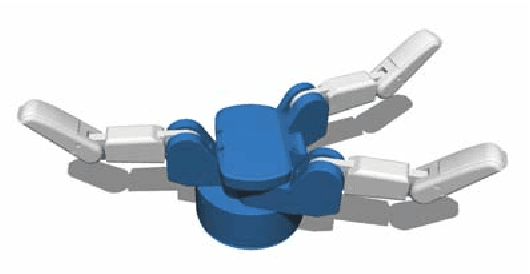
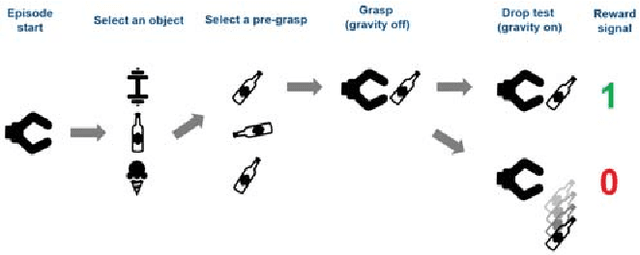
Grasping objects under uncertainty remains an open problem in robotics research. This uncertainty is often due to noisy or partial observations of the object pose or shape. To enable a robot to react appropriately to unforeseen effects, it is crucial that it continuously takes sensor feedback into account. While visual feedback is important for inferring a grasp pose and reaching for an object, contact feedback offers valuable information during manipulation and grasp acquisition. In this paper, we use model-free deep reinforcement learning to synthesize control policies that exploit contact sensing to generate robust grasping under uncertainty. We demonstrate our approach on a multi-fingered hand that exhibits more complex finger coordination than the commonly used two-fingered grippers. We conduct extensive experiments in order to assess the performance of the learned policies, with and without contact sensing. While it is possible to learn grasping policies without contact sensing, our results suggest that contact feedback allows for a significant improvement of grasping robustness under object pose uncertainty and for objects with a complex shape.
Learning a Structured Neural Network Policy for a Hopping Task
Aug 06, 2018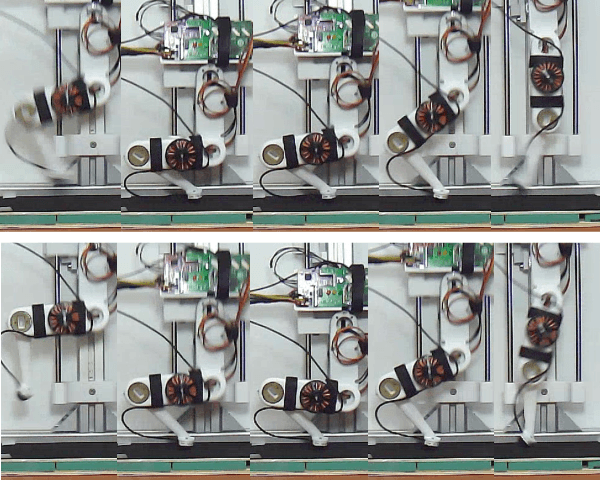
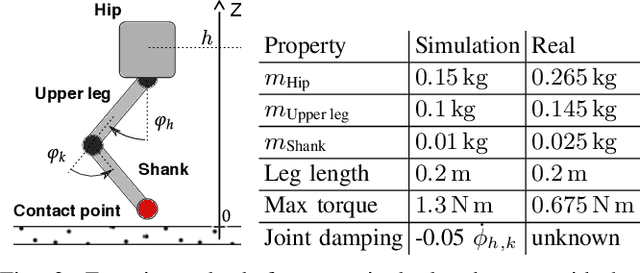
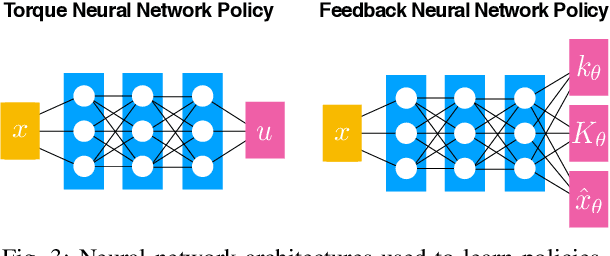
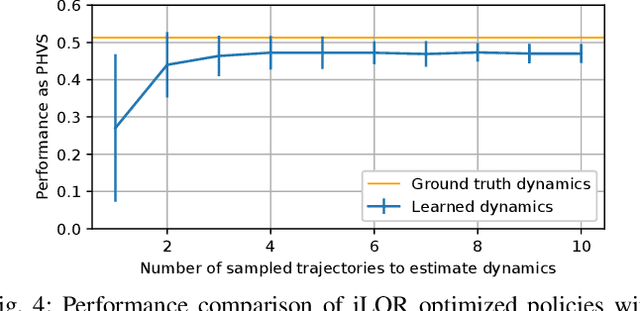
In this work we present a method for learning a reactive policy for a simple dynamic locomotion task involving hard impact and switching contacts where we assume the contact location and contact timing to be unknown. To learn such a policy, we use optimal control to optimize a local controller for a fixed environment and contacts. We learn the contact-rich dynamics for our underactuated systems along these trajectories in a sample efficient manner. We use the optimized policies to learn the reactive policy in form of a neural network. Using a new neural network architecture, we are able to preserve more information from the local policy and make its output interpretable in the sense that its output in terms of desired trajectories, feedforward commands and gains can be interpreted. Extensive simulations demonstrate the robustness of the approach to changing environments, outperforming a model-free gradient policy based methods on the same tasks in simulation. Finally, we show that the learned policy can be robustly transferred on a real robot.
Walking Control Based on Step Timing Adaptation
Jul 23, 2018
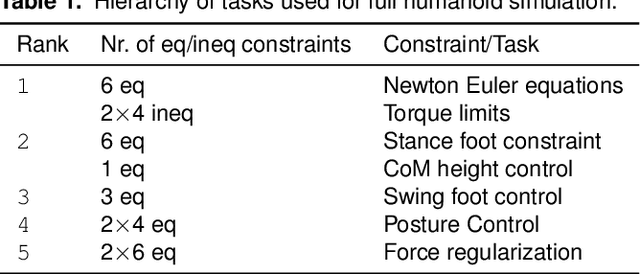
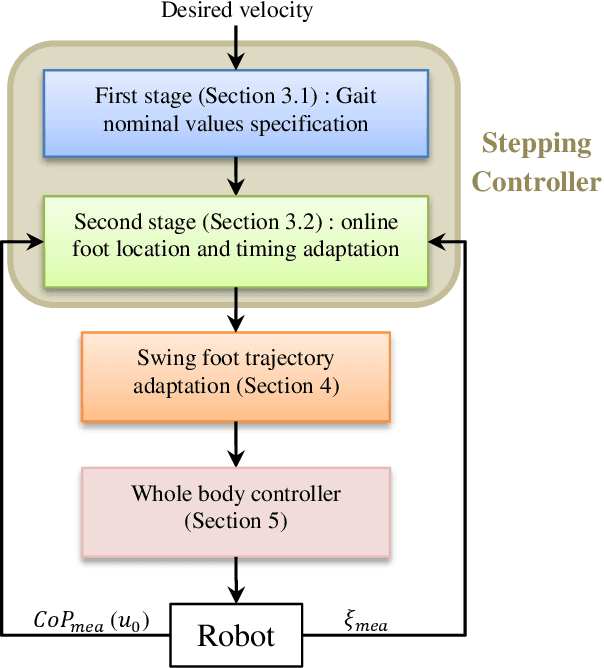
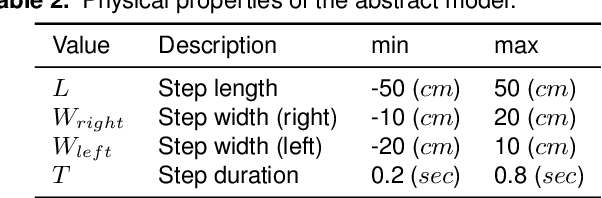
Step adjustment for biped robots has been shown to improve gait robustness, however the adaptation of step timing is often neglected in control strategies because it gives rise to non-convex problems when optimized over several steps. In this paper, we argue that it is not necessary to optimize walking over several steps to guarantee stability and that it is sufficient to merely select the next step timing and location. From this insight, we propose a novel walking pattern generator with linear constraints that optimally selects step location and timing at every control cycle. The resulting controller is computationally simple, yet guarantees that any viable state will remain viable in the future. We propose a swing foot adaptation strategy and show how the approach can be used with an inverse dynamics controller without any explicit control of the center of mass or the foot center of pressure. This is particularly useful for biped robots with limited control authority on their foot center of pressure, such as robots with point feet and robots with passive ankles. Extensive simulations on a humanoid robot with passive ankles subject to external pushes and foot slippage demonstrate the capabilities of the approach in cases where the foot center of pressure cannot be controlled and emphasize the importance of step timing adaptation to stabilize walking.
Learning Task-Specific Dynamics to Improve Whole-Body Control
Mar 08, 2018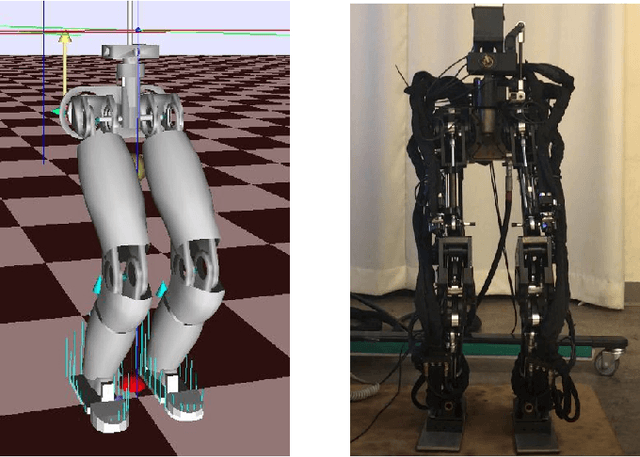
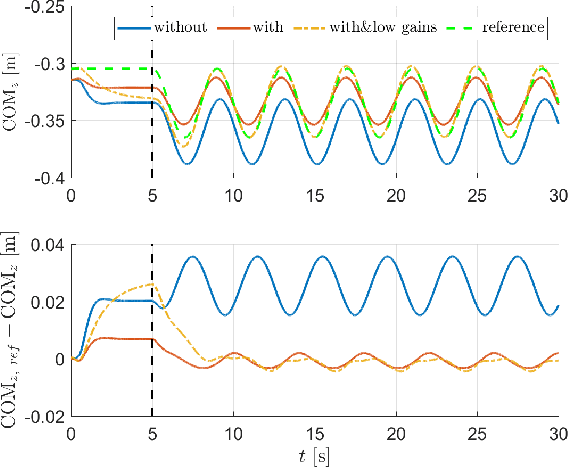
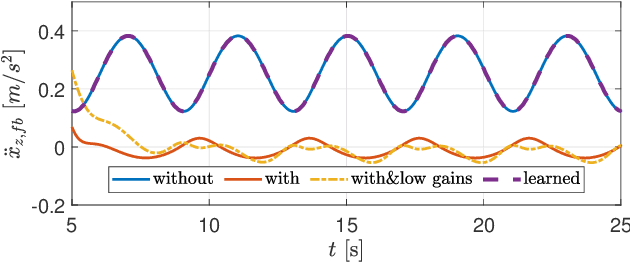
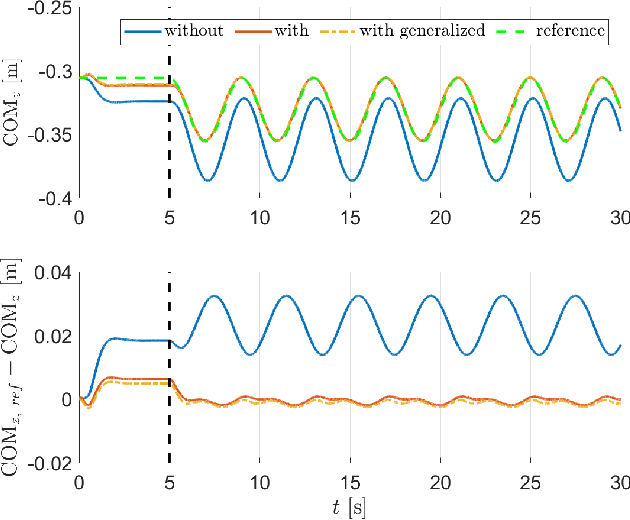
In task-based inverse dynamics control, reference accelerations used to follow a desired plan can be broken down into feedforward and feedback trajectories. The feedback term accounts for tracking errors that are caused from inaccurate dynamic models or external disturbances. On underactuated, free-floating robots, such as humanoids, high feedback terms can be used to improve tracking accuracy; however, this can lead to very stiff behavior or poor tracking accuracy due to limited control bandwidth. In this paper, we show how to reduce the required contribution of the feedback controller by incorporating learned task-space reference accelerations. Thus, we i) improve the execution of the given specific task, and ii) offer the means to reduce feedback gains, providing for greater compliance of the system. With a systematic approach we also reduce heuristic tuning of the model parameters and feedback gains, often present in real-world experiments. In contrast to learning task-specific joint-torques, which might produce a similar effect but can lead to poor generalization, our approach directly learns the task-space dynamics of the center of mass of a humanoid robot. Simulated and real-world results on the lower part of the Sarcos Hermes humanoid robot demonstrate the applicability of the approach.
An MPC Walking Framework With External Contact Forces
Feb 27, 2018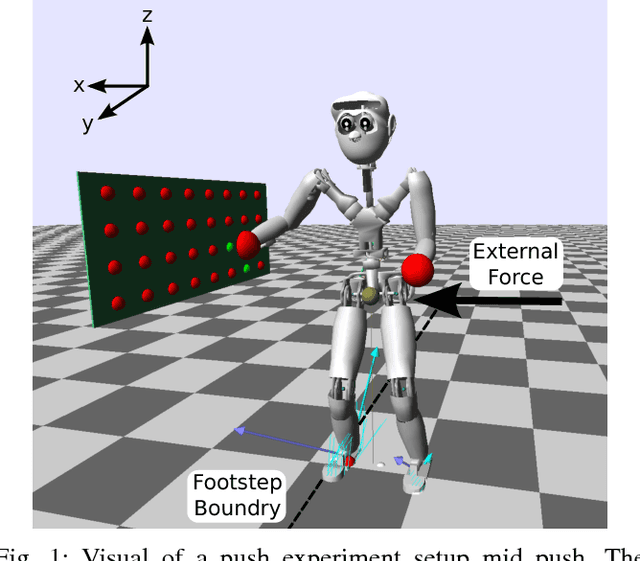
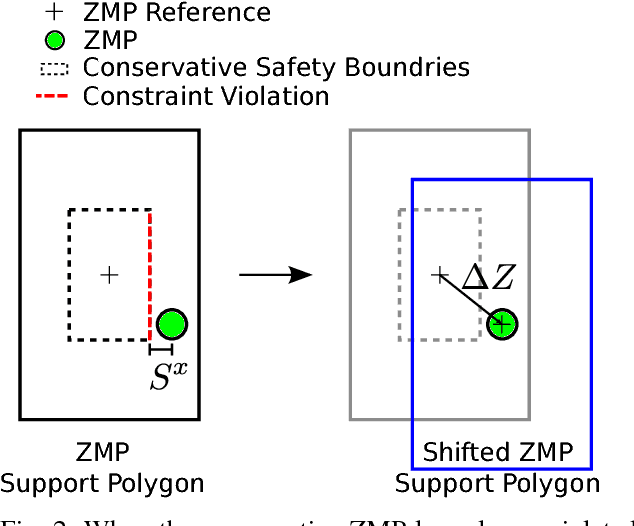
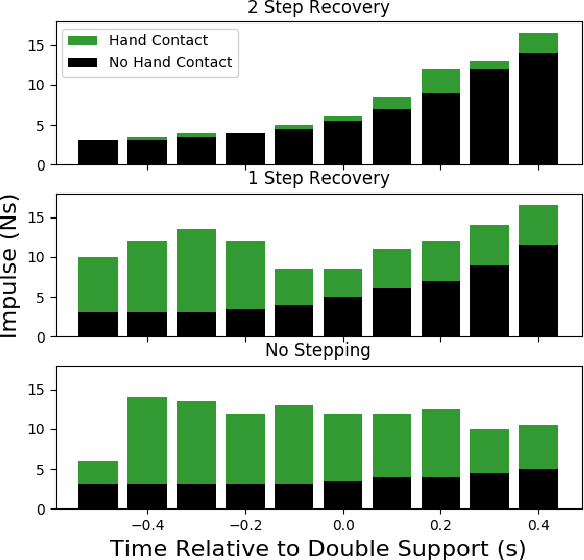
In this work, we present an extension to a linear Model Predictive Control (MPC) scheme that plans external contact forces for the robot when given multiple contact locations and their corresponding friction cone. To this end, we set up a two-step optimization problem. In the first optimization, we compute the Center of Mass (CoM) trajectory, foot step locations, and introduce slack variables to account for violating the imposed constraints on the Zero Moment Point (ZMP). We then use the slack variables to trigger the second optimization, in which we calculate the optimal external force that compensates for the ZMP tracking error. This optimization considers multiple contacts positions within the environment by formulating the problem as a Mixed Integer Quadratic Program (MIQP) that can be solved at a speed between 100-300 Hz. Once contact is created, the MIQP reduces to a single Quadratic Program (QP) that can be solved in real-time ($<$ 1kHz). Simulations show that the presented walking control scheme can withstand disturbances 2-3x larger with the additional force provided by a hand contact.
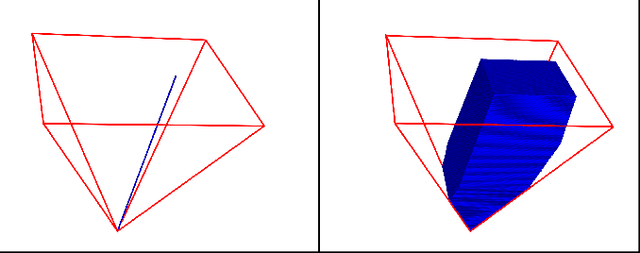
On Time Optimization of Centroidal Momentum Dynamics
Feb 26, 2018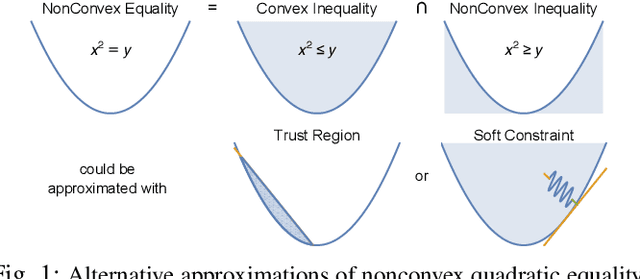
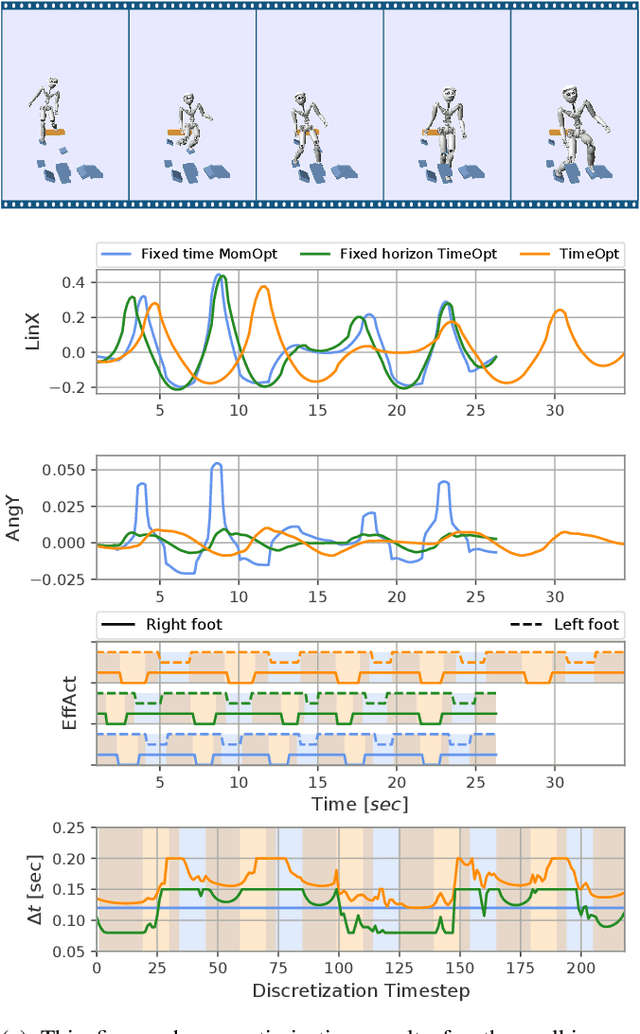
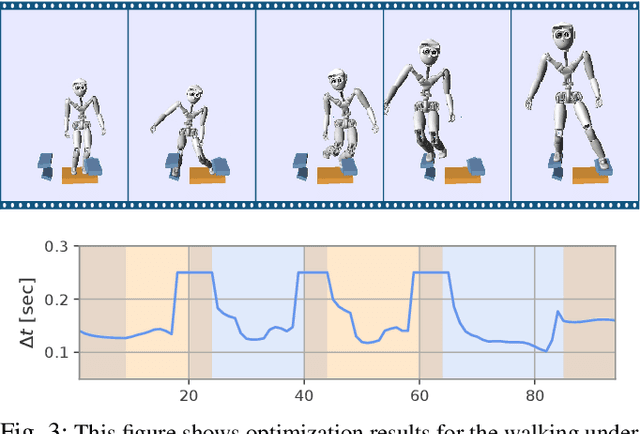
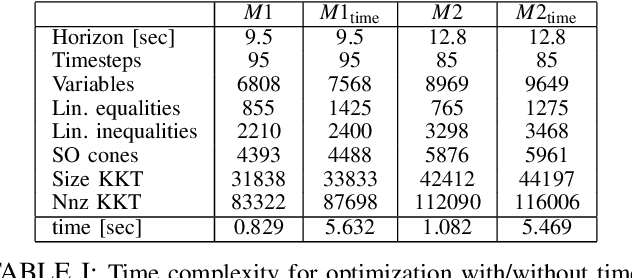
Recently, the centroidal momentum dynamics has received substantial attention to plan dynamically consistent motions for robots with arms and legs in multi-contact scenarios. However, it is also non convex which renders any optimization approach difficult and timing is usually kept fixed in most trajectory optimization techniques to not introduce additional non convexities to the problem. But this can limit the versatility of the algorithms. In our previous work, we proposed a convex relaxation of the problem that allowed to efficiently compute momentum trajectories and contact forces. However, our approach could not minimize a desired angular momentum objective which seriously limited its applicability. Noticing that the non-convexity introduced by the time variables is of similar nature as the centroidal dynamics one, we propose two convex relaxations to the problem based on trust regions and soft constraints. The resulting approaches can compute time-optimized dynamically consistent trajectories sufficiently fast to make the approach realtime capable. The performance of the algorithm is demonstrated in several multi-contact scenarios for a humanoid robot. In particular, we show that the proposed convex relaxation of the original problem finds solutions that are consistent with the original non-convex problem and illustrate how timing optimization allows to find motion plans that would be difficult to plan with fixed timing.
The Role of Measurement Uncertainty in Optimal Control for Contact Interactions
Jan 16, 2018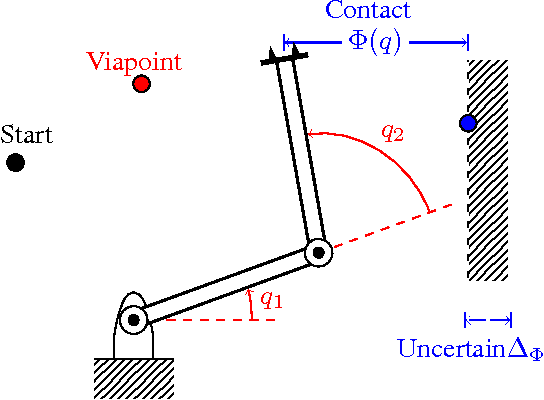
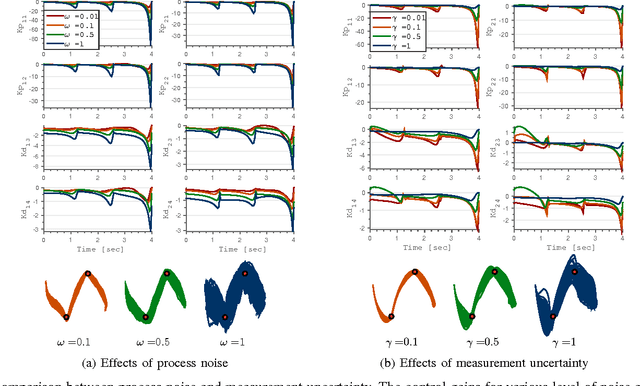
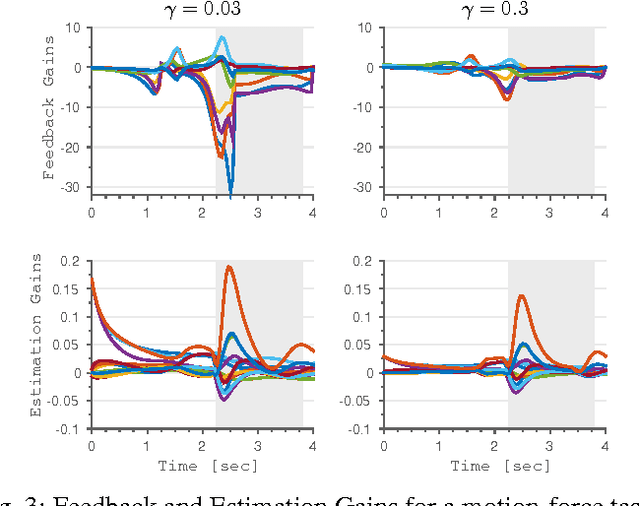
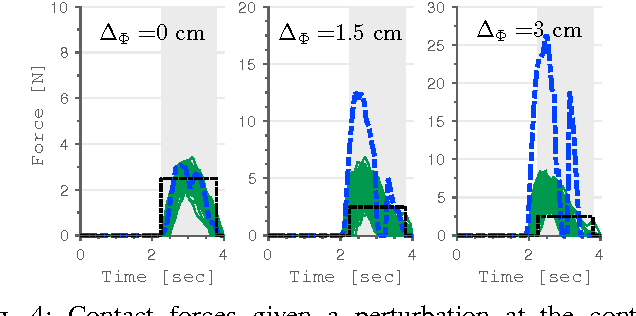
Stochastic Optimal Control (SOC) typically considers noise only in the process model, i.e. unknown disturbances. However, in many robotic applications that involve interaction with the environment, such as locomotion and manipulation, uncertainty also comes from lack of precise knowledge of the world, which is not an actual disturbance. We develop a computationally efficient SOC algorithm, based on risk-sensitive control, that takes into account uncertainty in the measurements. We include the dynamics of an observer in such a way that the control law explicitly depends on the current measurement uncertainty. We show that high measurement uncertainty leads to low impedance behaviors, a result in contrast with the effects of process noise variance that creates stiff behaviors. Simulation results on a simple 2D manipulator show that our controller can create better interaction with the environment under uncertain contact locations than traditional SOC approaches.