 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLog-linear Error State Model Derivation without Approximation for INS
Aug 06, 2022Through assembling the navigation parameters as matrix Lie group state, the corresponding inertial navigation system (INS) kinematic model possesses a group-affine property. The Lie logarithm of the navigation state estimation error satisfies a log-linear autonomous differential equation. These log-linear models are still applicable even with arbitrarily large initial errors, which is very attractive for INS initial alignment. However, in existing works, the log-linear models are all derived based on first-order linearization approximation, which seemingly goes against their successful applications in INS initial alignment with large misalignments. In this work, it is shown that the log-linear models can also be derived without any approximation, the error dynamics for both left and right invariant error in continuous time are given in matrix Lie group SE_2 (3) for the first time. This work provides another evidence for the validity of the log-linear model in situations with arbitrarily large initial errors.
MEKF Ignoring Initial Conditions for Attitude Estimation Using Vector Observations
Oct 26, 2021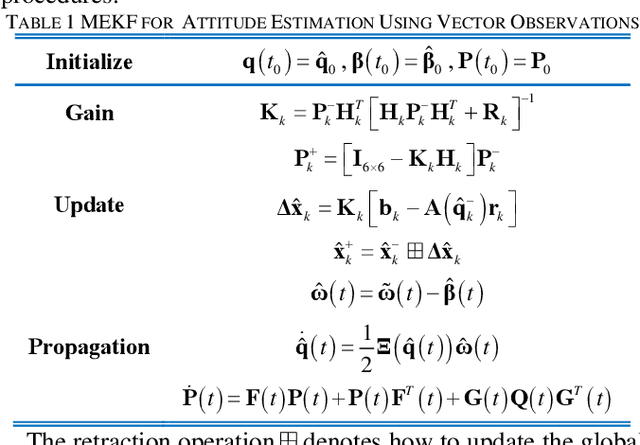
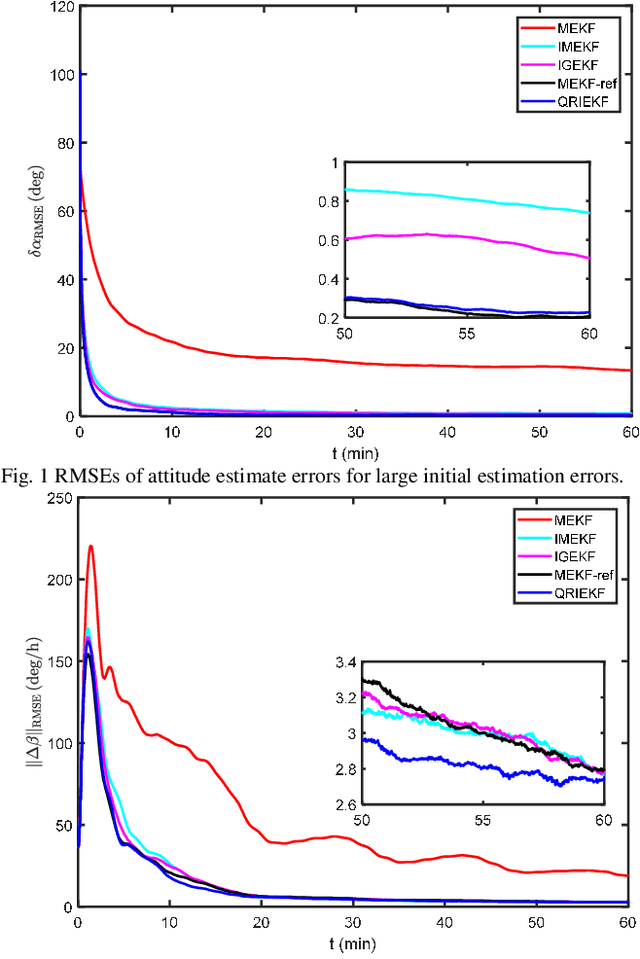
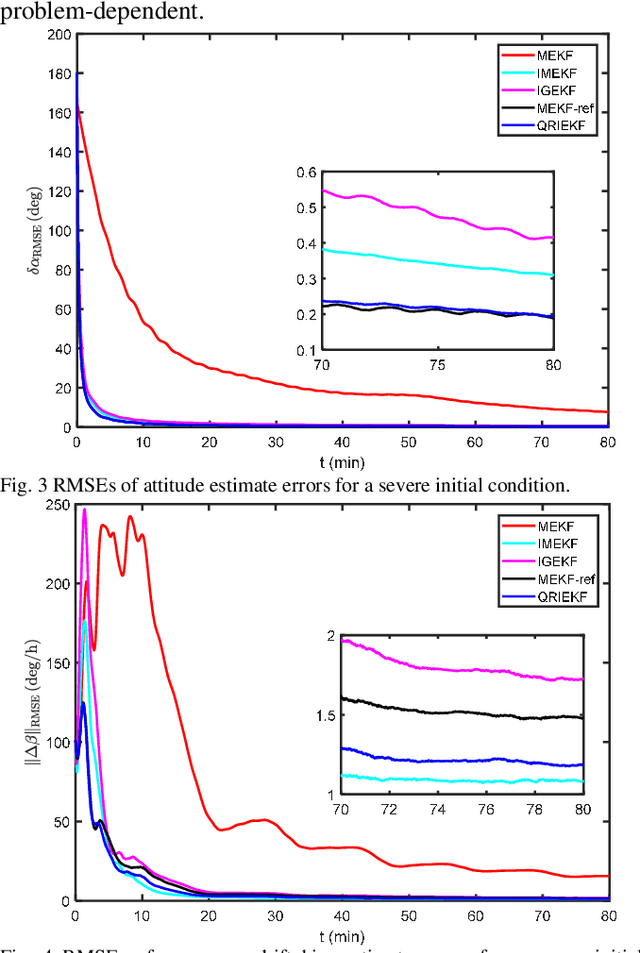
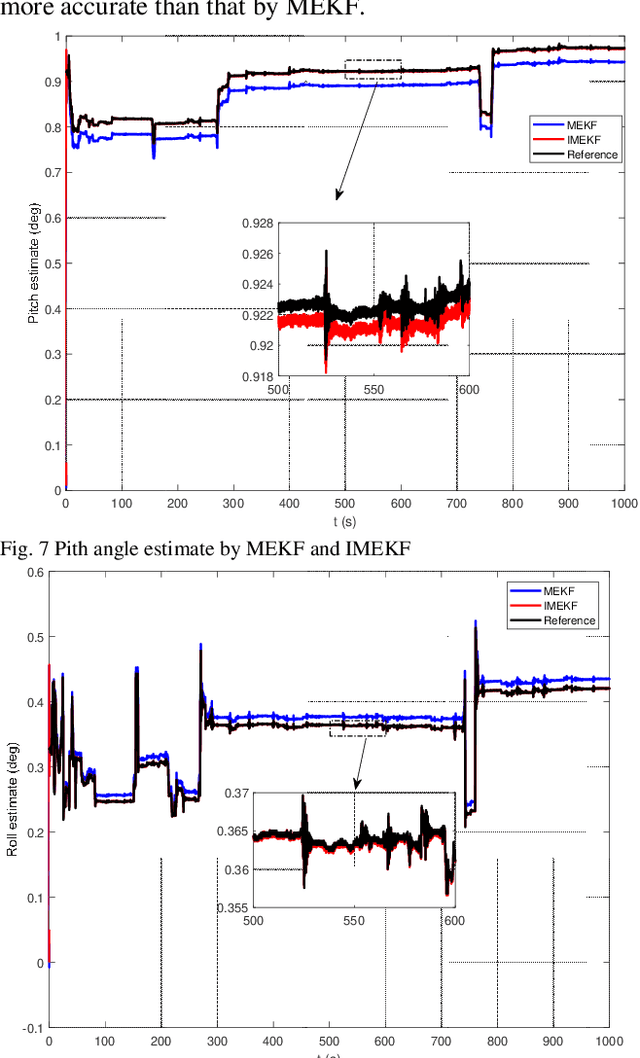
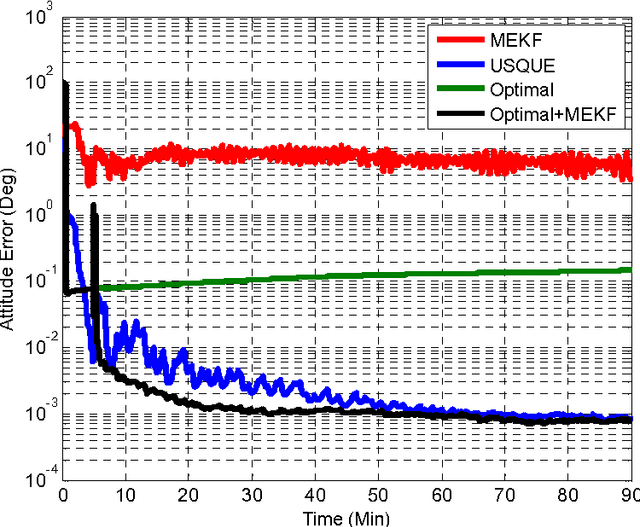
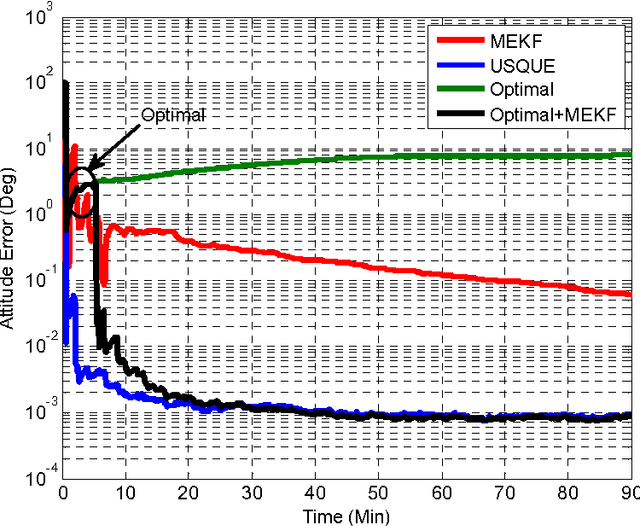
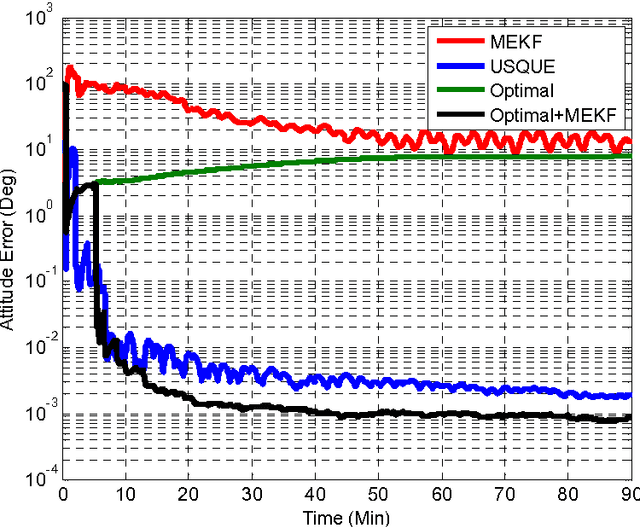
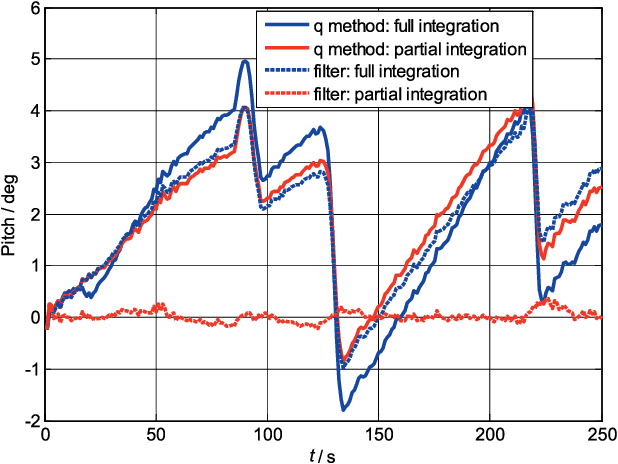
In this paper, the well-known multiplicative extended Kalman filter (MEKF) is re-investigated for attitude estimation using vector observations. From the Lie group theory, it is shown that the attitude estimation model is group affine and its error state model should be trajectory-independent. Moreover, with such trajectory-independent error state model, the linear Kalman filter is still effective for large initialization errors. However, the measurement model of the traditional MEKF is dependent on the attitude prediction, which is therefore trajectory-dependent. This is also the main reason why the performance of traditional MEKF is degraded for large initialization errors. Through substitution of the attitude prediction related term with the vector observation in body frame, a trajectory-independent measurement model is derived for MEKF. Meanwhile, the MEKFs with reference attitude error definition and with global state formulating on special Euclidean group have also been studied, with main focus on derivation of the trajectory-independent measurement models. Extensive Monte Carlo simulations and field test of attitude estimation implementations demonstrate that the performance of MEKFs can be much improved with trajectory-independent measurement models.
Inertial based Integration with Transformed INS Mechanization in Earth Frame
Mar 17, 2021
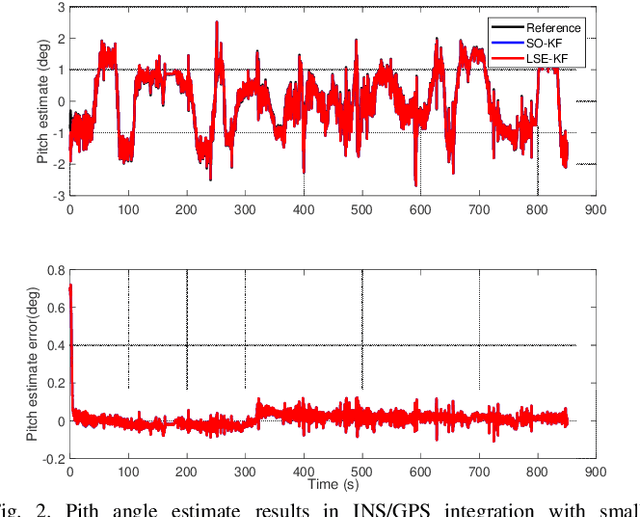
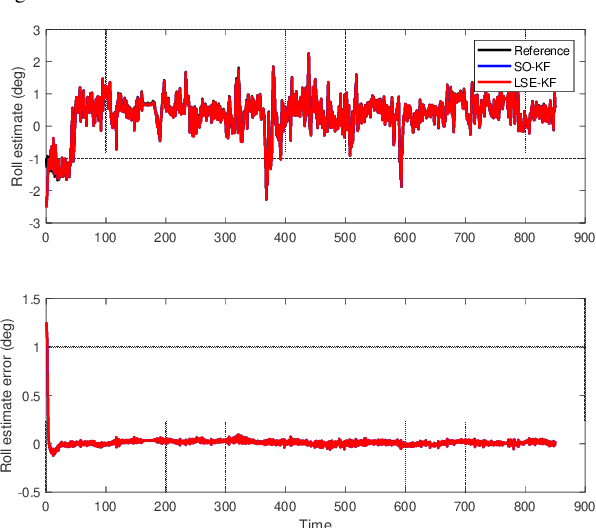
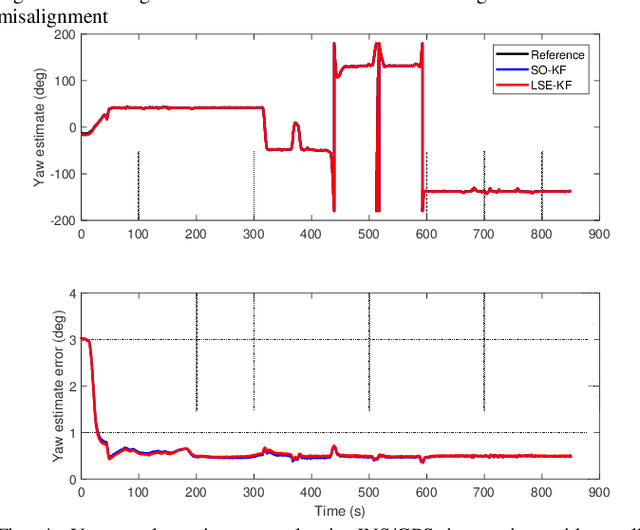
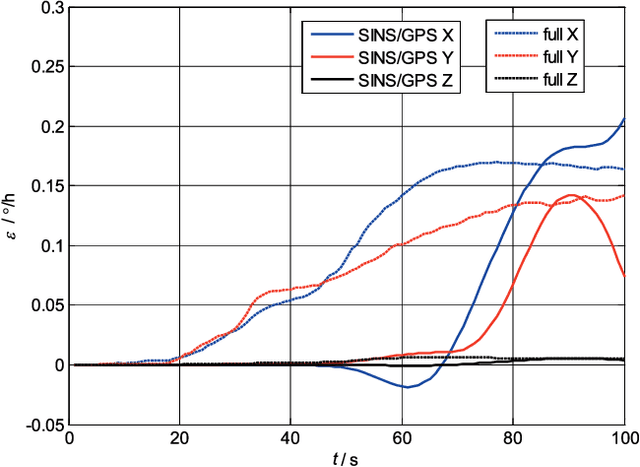
This paper proposes to use a newly-derived transformed inertial navigation system (INS) mechanization to fuse INS with other complementary navigation systems. Through formulating the attitude, velocity and position as one group state of group of double direct spatial isometries SE2(3), the transformed INS mechanization has proven to be group affine, which means that the corresponding vector error state model will be trajectory-independent. In order to make use of the transformed INS mechanization in inertial based integration, both the right and left vector error state models are derived. The INS/GPS and INS/Odometer integration are investigated as two representatives of inertial based integration. Some application aspects of the derived error state models in the two applications are presented, which include how to select the error state model, initialization of the SE2(3) based error state covariance and feedback correction corresponding to the error state definitions. Extensive Monte Carlo simulations and land vehicle experiments are conducted to evaluate the performance of the derived error state models. It is shown that the most striking superiority of using the derived error state models is their ability to handle the large initial attitude misalignments, which is just the result of log-linearity property of the derived error state models. Therefore, the derived error state models can be used in the so-called attitude alignment for the two applications. Moreover, the derived right error state-space model is also very preferred for long-endurance INS/Odometer integration due to the filtering consistency caused by its less dependence on the global state estimate.
Strapdown Inertial Navigation System Initial Alignment based on Group of Double Direct Spatial Isometries
Feb 25, 2021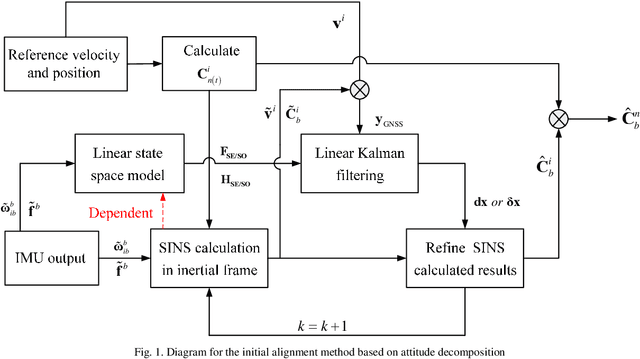
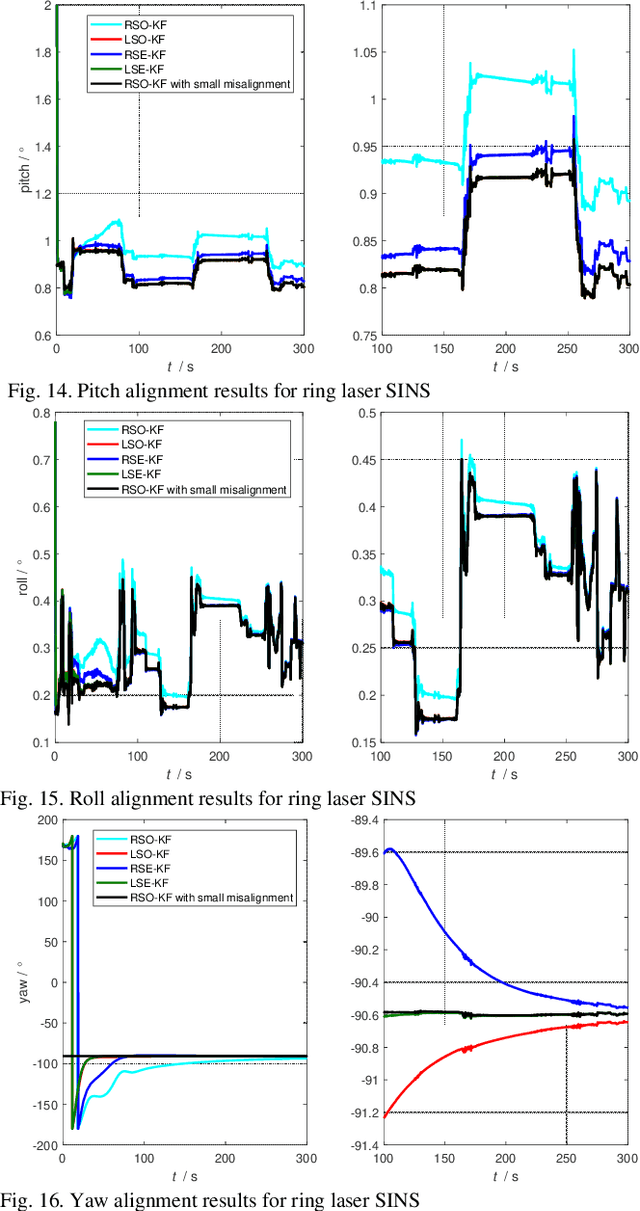
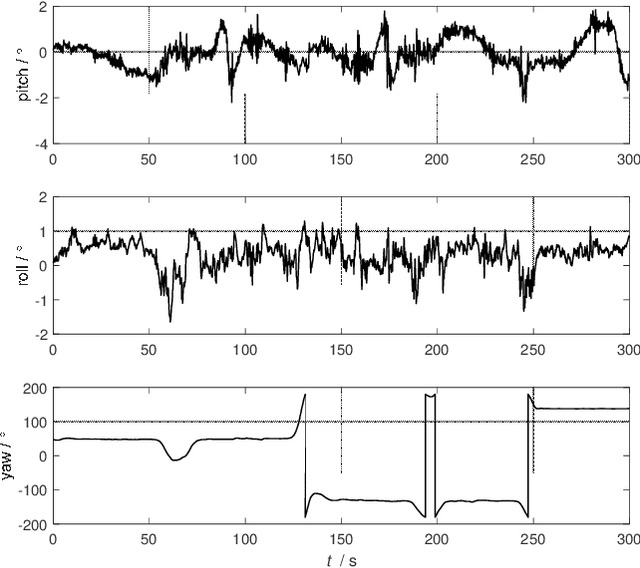
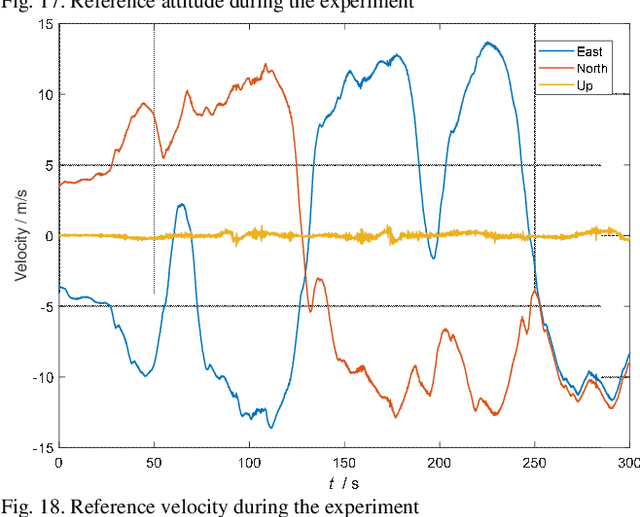
The task of strapdown inertial navigation system (SINS) initial alignment is to calculate the attitude transformation matrix from body frame to navigation frame. In this paper, such attitude transformation matrix is divided into two parts through introducing the initial inertially fixed navigation frame as inertial frame. The attitude changes of the navigation frame corresponding to the defined inertial frame can be exactly calculated with known velocity and position provided by GNSS. The attitude from body frame to the defined inertial frame is estimated based on the SINS mechanization in inertial frame. The attitude, velocity and position in inertial frame are formulated together as element of the group of double direct spatial isometries.It is proven that the group state model in inertial frame satisfies a particular "group affine" property and the corresponding error model satisfies a "log linear" autonomous differential equation on the Lie algebra. Based on such striking property, the attitude from body frame to the defined inertial frame can be estimated based on the linear error model with even extreme large misalignments. Two different error state vectors are extracted based on right and left matrix multiplications and the detailed linear state space models are derived based on the right and left errors for SINS mechanization in inertial frame. With the derived linear state space models, the explicit initial alignment procedures have been presented. Extensive simulation and field tests indicate that the initial alignment based on the left error model can perform quite well within a wide range of initial attitude errors, although the used filter is still a type of linear Kalman filter. This method is promising in practical products abandoning the traditional coarse alignment stage.
SE(3) based Extended Kalman Filter for Spacecraft Attitude Estimation
Mar 29, 2020In this paper, the spacecraft attitude estimation problem has been investigated making use of the concept of matrix Lie group. Through formulation of the attitude and gyroscope bias as elements of SE(3), the corresponding extended Kalman filter, termed as SE(3)-EKF, has been derived. It is shown that the resulting SE(3)-EKF is just the newly-derived geometric extended Kalman filter (GEKF) for spacecraft attitude estimation. This provides a new perspective on the GEKF besides the common frame errors definition. Moreover, the SE(3)-EKF with reference frame attitude error is also derived and the resulting algorithm bears much resemblance to the right invariant EKF.
Semi-Analytic Method for SINS Attitude and Parameters Online Estimation
Jan 16, 2018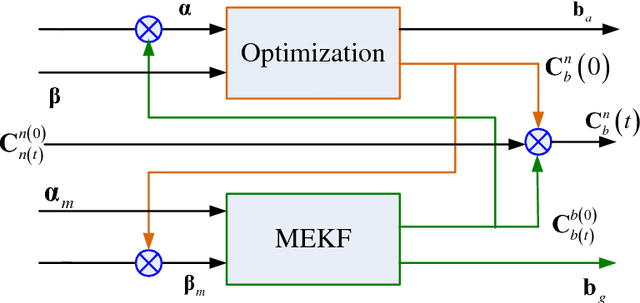
In this note, the attitude and inertial sensors drift biases estimation for Strapdown inertial navigation system is investigated. A semi-analytic method is proposed, which contains two interlaced solution procedures. Specifically, the attitude encoding the body frame changes and gyroscopes drift biases are estimated through attitude estimation while the attitude encoding the constant value at the very start and accelerometers drift biases are determined through online optimization.
Alternate Derivation of Geometric Extended Kalman Filter by MEKF Approach
Oct 11, 2017This note is devoted to deriving the measurement update of the geometric extended Kalman filter using the multiplicative extended Kalman filtering approach, resulting in the attitude estimator referred as geometric multiplicative extended Kalman filter. The equivalence of the derived geometric multiplicative extended Kalman filter and geometric extended Kalman filter is also demonstrated in this note.
Dynamic Analytical Initialization Method for Spacecraft Attitude Estimators
Jun 21, 2017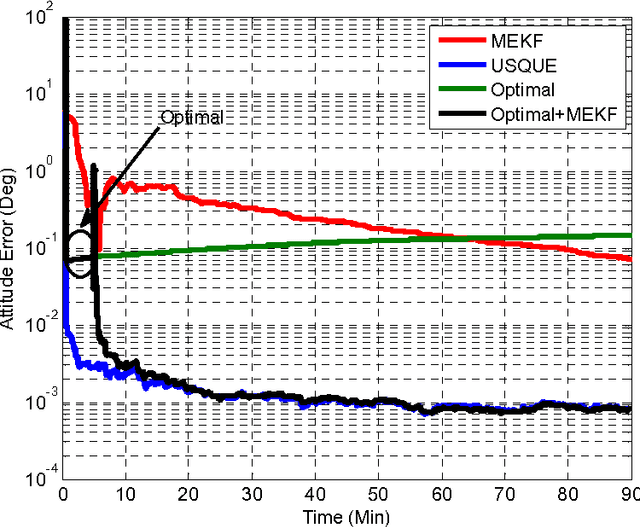
This paper proposes a dynamic analytical initialization method for spacecraft attitude estimators. In the proposed method, the desired attitude matrix is decomposed into two parts: one is the constant attitude matrix at the very start and the other encodes the attitude changes of the body frame from its initial state. The latter one can be calculated recursively using the gyroscope outputs and the constant attitude matrix can be determined using constructed vector observations at different time. Compared with traditional initialization methods, the proposed method does not necessitate the spacecraft being static or more than two non-collinear vector observations at the same time. Therefore, the proposed method can promote increased spacecraft autonomy by autonomous initialization of attitude estimators. The effectiveness and prospect of the proposed method in spacecraft attitude estimation applications have been validated through numerical simulations.
Optimization-based Alignment for Strapdown Inertial Navigation System Comparison and Extension
Nov 23, 2016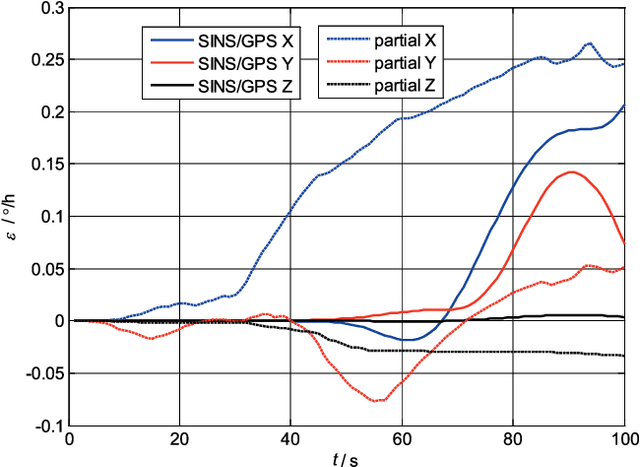
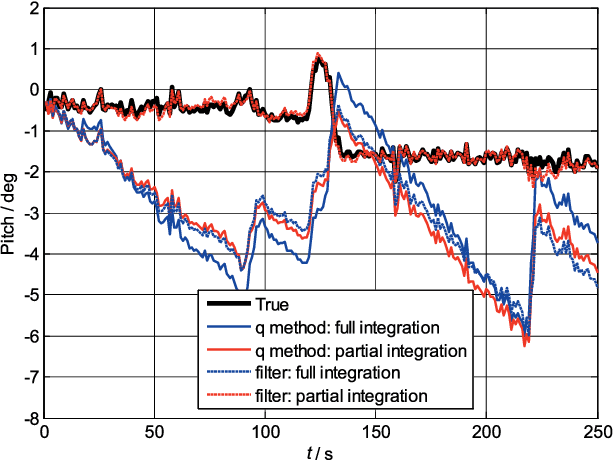
In this paper, the optimization-based alignment (OBA) methods are investigated with main focus on the vector observations construction procedures for the strapdown inertial navigation system (SINS). The contributions of this study are twofold. First the OBA method is extended to be able to estimate the gyroscopes biases coupled with the attitude based on the construction process of the existing OBA methods. This extension transforms the initial alignment into an attitude estimation problem which can be solved using the nonlinear filtering algorithms. The second contribution is the comprehensive evaluation of the OBA methods and their extensions with different vector observations construction procedures in terms of convergent speed and steady-state estimate using field test data collected from different grades of SINS. This study is expected to facilitate the selection of appropriate OBA methods for different grade SINS.
Particle Filtering for Attitude Estimation Using a Minimal Local-Error Representation: A Revisit
Nov 22, 2014In this note, we have revisited the previously published paper "Particle Filtering for Attitude Estimation Using a Minimal Local-Error Representation". In the revisit, we point out that the quaternion particle filtering based on the local/global representation structure has not made full use of the advantage of the particle filtering in terms of accuracy and robustness. Moreover, a normalized quaternion determining procedure based on the minimum mean-square error approach has been investigated into the quaternion-based particle filtering to obtain the fiducial quaternion for the transformation between quaternion and modified Rodrigues parameter. The modification investigated in this note is expected to make the quaternion particle filtering based on the local/global representation structure more strict.