 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLighting-Aware Representation Learning under Controllable Lighting Variation
Jun 05, 2026Variations in illumination remain a major challenge for visual representation learning, as they induce substantial appearance changes both across and within environments. While existing approaches typically address this issue through data augmentations that encourage models to become invariant to lighting changes, such strategies do not explicitly model lighting information during learning. Inspired by theories of human vision, we propose a lighting-aware representation learning framework that incorporates illumination variation as an explicit training signal rather than a nuisance factor to be suppressed. Our method extends contrastive learning by introducing an auxiliary objective that captures illumination-dependent variation in rendered scenes, enabling the model to jointly learn representations that preserve semantic consistency while remaining sensitive to lighting-dependent visual structure. We evaluate the proposed model on image classification and object detection tasks across the ImageNet, ExDark, and PASCAL VOC benchmarks. Results demonstrate that the proposed lighting-aware training consistently improves downstream performance over standard contrastive learning baselines, while maintaining the same architecture and training budget. Furthermore, our approach shows promising performance in supervised learning frameworks and under settings involving simpler lighting variation, suggesting broad applicability beyond complex illumination scenarios. These results indicate its potential to enhance model robustness and adaptability in complex visual environments as well as in more conventional image processing tasks.
Boundary representation learning via Transformer
Apr 07, 2025



The recent rise of generative artificial intelligence (AI), powered by Transformer networks, has achieved remarkable success in natural language processing, computer vision, and graphics. However, the application of Transformers in computer-aided design (CAD), particularly for processing boundary representation (B-rep) models, remains largely unexplored. To bridge this gap, this paper introduces Boundary Representation Transformer (BRT), a novel method adapting Transformer for B-rep learning. B-rep models pose unique challenges due to their irregular topology and continuous geometric definitions, which are fundamentally different from the structured and discrete data Transformers are designed for. To address this, BRT proposes a continuous geometric embedding method that encodes B-rep surfaces (trimmed and untrimmed) into B\'ezier triangles, preserving their shape and continuity without discretization. Additionally, BRT employs a topology-aware embedding method that organizes these geometric embeddings into a sequence of discrete tokens suitable for Transformers, capturing both geometric and topological characteristics within B-rep models. This enables the Transformer's attention mechanism to effectively learn shape patterns and contextual semantics of boundary elements in a B-rep model. Extensive experiments demonstrate that BRT achieves state-of-the-art performance in part classification and feature recognition tasks.
Context-driven self-supervised visual learning: Harnessing the environment as a data source
Jan 26, 2024



Visual learning often occurs in a specific context, where an agent acquires skills through exploration and tracking of its location in a consistent environment. The historical spatial context of the agent provides a similarity signal for self-supervised contrastive learning. We present a unique approach, termed Environmental Spatial Similarity (ESS), that complements existing contrastive learning methods. Using images from simulated, photorealistic environments as an experimental setting, we demonstrate that ESS outperforms traditional instance discrimination approaches. Moreover, sampling additional data from the same environment substantially improves accuracy and provides new augmentations. ESS allows remarkable proficiency in room classification and spatial prediction tasks, especially in unfamiliar environments. This learning paradigm has the potential to enable rapid visual learning in agents operating in new environments with unique visual characteristics. Potentially transformative applications span from robotics to space exploration. Our proof of concept demonstrates improved efficiency over methods that rely on extensive, disconnected datasets.
Using Navigational Information to Learn Visual Representations
Feb 10, 2022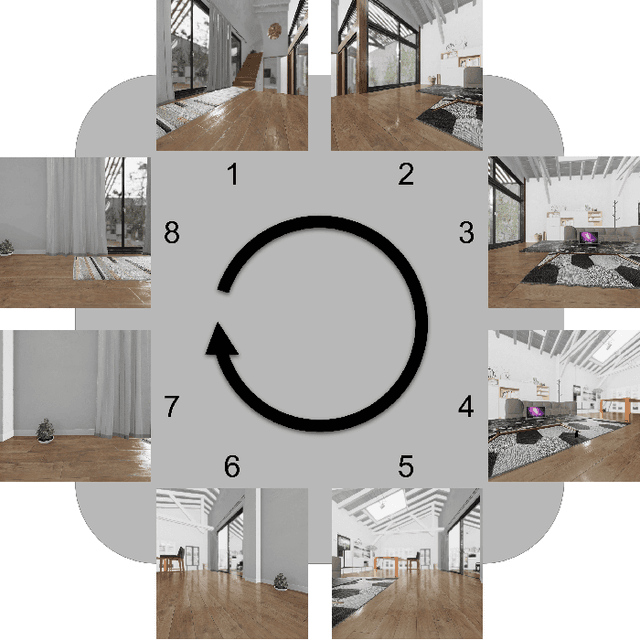
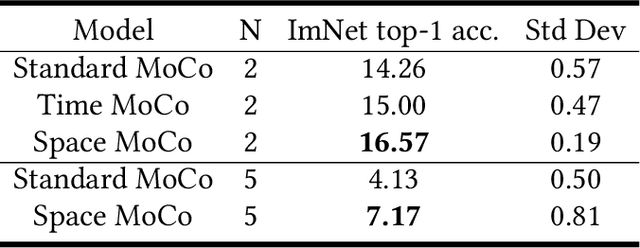
Children learn to build a visual representation of the world from unsupervised exploration and we hypothesize that a key part of this learning ability is the use of self-generated navigational information as a similarity label to drive a learning objective for self-supervised learning. The goal of this work is to exploit navigational information in a visual environment to provide performance in training that exceeds the state-of-the-art self-supervised training. Here, we show that using spatial and temporal information in the pretraining stage of contrastive learning can improve the performance of downstream classification relative to conventional contrastive learning approaches that use instance discrimination to discriminate between two alterations of the same image or two different images. We designed a pipeline to generate egocentric-vision images from a photorealistic ray-tracing environment (ThreeDWorld) and record relevant navigational information for each image. Modifying the Momentum Contrast (MoCo) model, we introduced spatial and temporal information to evaluate the similarity of two views in the pretraining stage instead of instance discrimination. This work reveals the effectiveness and efficiency of contextual information for improving representation learning. The work informs our understanding of the means by which children might learn to see the world without external supervision.
Auto-Retoucher(ART) - A framework for Background Replacement and Image Editing
Jan 13, 2019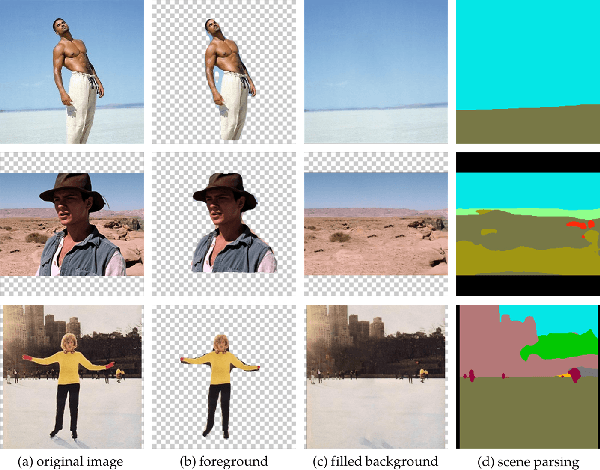
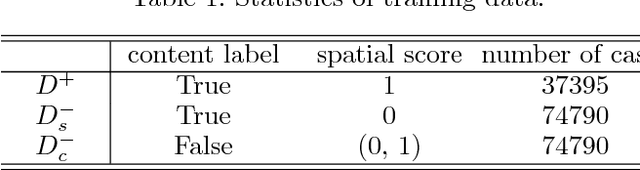
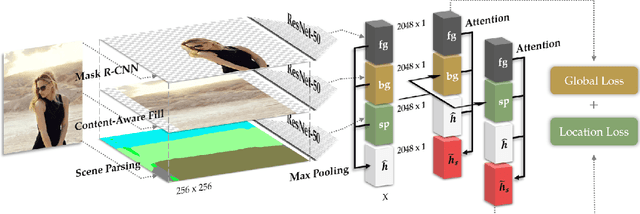
Replacing the background and simultaneously adjusting foreground objects is a challenging task in image editing. Current techniques for generating such images relies heavily on user interactions with image editing softwares, which is a tedious job for professional retouchers. To reduce their workload, some exciting progress has been made on generating images with a given background. However, these models can neither adjust the position and scale of the foreground objects, nor guarantee the semantic consistency between foreground and background. To overcome these limitations, we propose a framework -- ART(Auto-Retoucher), to generate images with sufficient semantic and spatial consistency. Images are first processed by semantic matting and scene parsing modules, then a multi-task verifier model will give two confidence scores for the current background and position setting. We demonstrate that our jointly optimized verifier model successfully improves the visual consistency, and our ART framework performs well on images with the human body as foregrounds.