 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShields to Guarantee Probabilistic Safety in MDPs
May 11, 2026Shielding is a prominent model-based technique to ensure safety of autonomous agents. Classical shielding aims to ensure that nothing bad ever happens and comes with strong guarantees about safety and maximal permissiveness. However, shielding systems for probabilistic safety, where something bad is allowed to happen with an acceptable probability, has proven to be more intricate. This paper presents a formal framework that conservatively extends classical shields to probabilistic safety. In this framework, we (i) demonstrate the impossibility of preserving the strong guarantees on safety and permissiveness, (ii) provide natural shields with weaker guarantees, and (iii) introduce offline and online shield constructions ensuring strong safety guarantees. The empirical evaluation highlights the practical advantages of the new shields, as well as their computational feasibility.
Constrained and Robust Policy Synthesis with Satisfiability-Modulo-Probabilistic-Model-Checking
Nov 15, 2025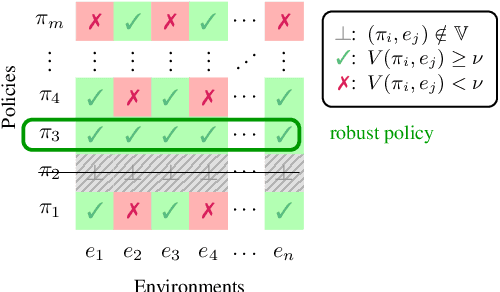
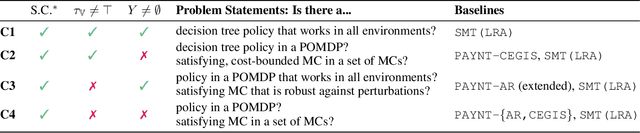
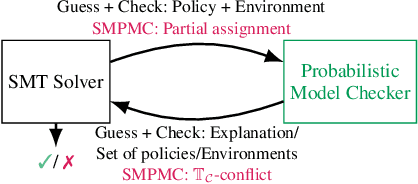

The ability to compute reward-optimal policies for given and known finite Markov decision processes (MDPs) underpins a variety of applications across planning, controller synthesis, and verification. However, we often want policies (1) to be robust, i.e., they perform well on perturbations of the MDP and (2) to satisfy additional structural constraints regarding, e.g., their representation or implementation cost. Computing such robust and constrained policies is indeed computationally more challenging. This paper contributes the first approach to effectively compute robust policies subject to arbitrary structural constraints using a flexible and efficient framework. We achieve flexibility by allowing to express our constraints in a first-order theory over a set of MDPs, while the root for our efficiency lies in the tight integration of satisfiability solvers to handle the combinatorial nature of the problem and probabilistic model checking algorithms to handle the analysis of MDPs. Experiments on a few hundred benchmarks demonstrate the feasibility for constrained and robust policy synthesis and the competitiveness with state-of-the-art methods for various fragments of the problem.
Improving the Noise Estimation of Latent Neural Stochastic Differential Equations
Dec 23, 2024



Latent neural stochastic differential equations (SDEs) have recently emerged as a promising approach for learning generative models from stochastic time series data. However, they systematically underestimate the noise level inherent in such data, limiting their ability to capture stochastic dynamics accurately. We investigate this underestimation in detail and propose a straightforward solution: by including an explicit additional noise regularization in the loss function, we are able to learn a model that accurately captures the diffusion component of the data. We demonstrate our results on a conceptual model system that highlights the improved latent neural SDE's capability to model stochastic bistable dynamics.