 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Cooperative Multi-Vehicle System for Interception of Aerial and Stationary Targets in Unknown Environments
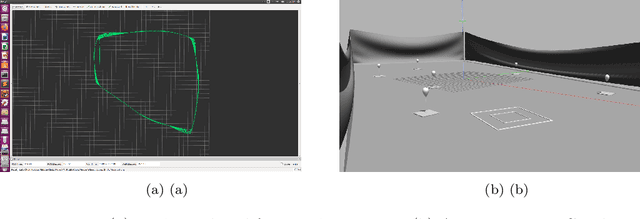
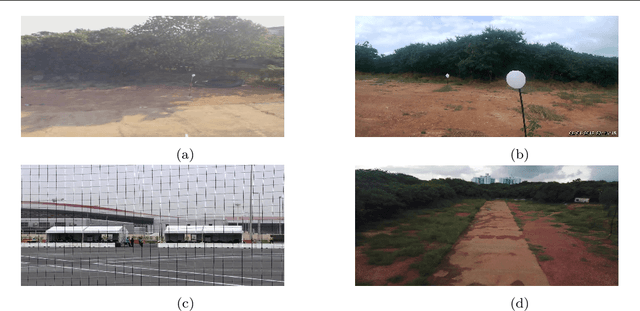
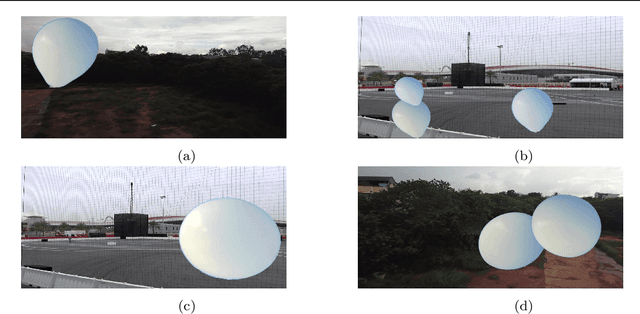
Sep 01, 2021This paper presents the design, development, and testing of hardware-software systems by the IISc-TCS team for Challenge 1 of the Mohammed Bin Zayed International Robotics Challenge 2020. The goal of Challenge 1 was to grab a ball suspended from a moving and maneuvering UAV and pop balloons anchored to the ground, using suitable manipulators. The important tasks carried out to address this challenge include the design and development of a hardware system with efficient grabbing and popping mechanisms, considering the restrictions in volume and payload, design of accurate target interception algorithms using visual information suitable for outdoor environments, and development of a software architecture for dynamic multi-agent aerial systems performing complex dynamic missions. In this paper, a single degree of freedom manipulator attached with an end-effector is designed for grabbing and popping, and robust algorithms are developed for the interception of targets in an uncertain environment. Vision-based guidance and tracking laws are proposed based on the concept of pursuit engagement and artificial potential function. The software architecture presented in this work proposes an Operation Management System (OMS) architecture that allocates static and dynamic tasks collaboratively among multiple UAVs to perform any given mission. An important aspect of this work is that all the systems developed were designed to operate in completely autonomous mode. A detailed description of the architecture along with simulations of complete challenge in the Gazebo environment and field experiment results are also included in this work. The proposed hardware-software system is particularly useful for counter-UAV systems and can also be modified in order to cater to several other applications.
Design and Integration of a Drone based Passive Manipulator for Capturing Flying Targets
Feb 23, 2021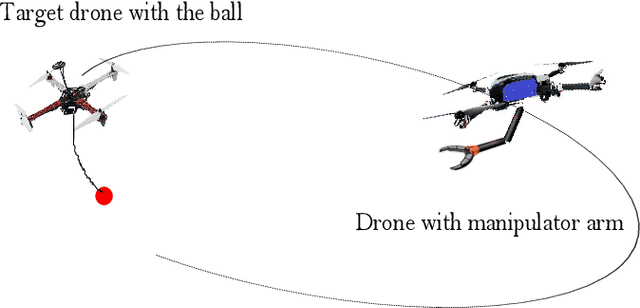
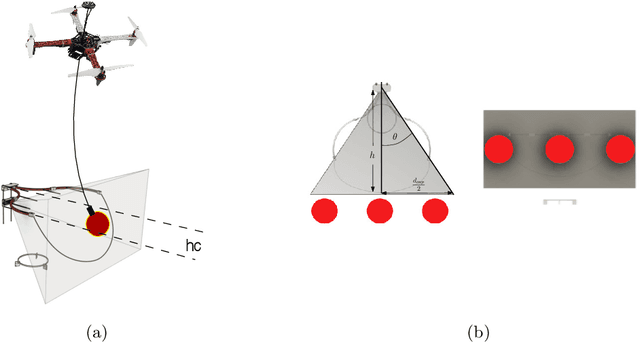
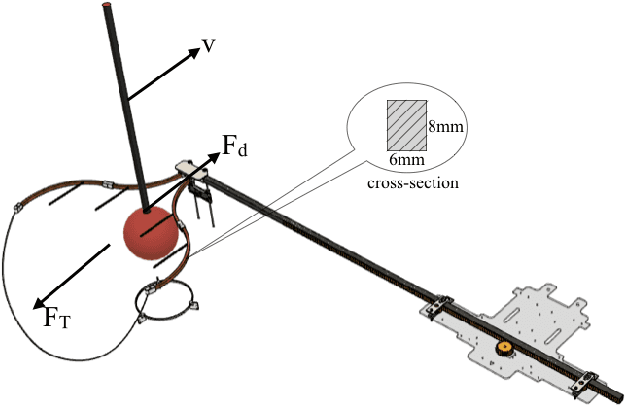
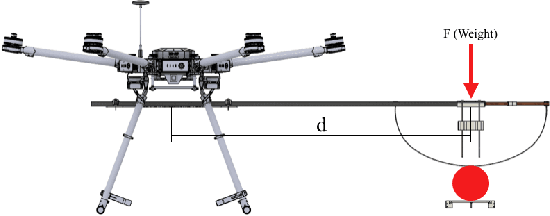
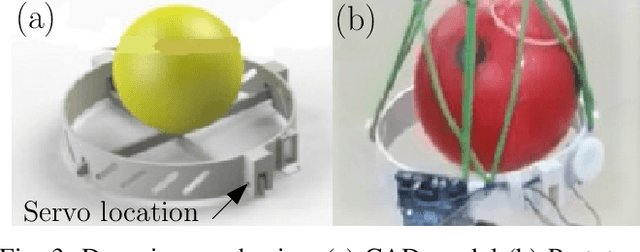
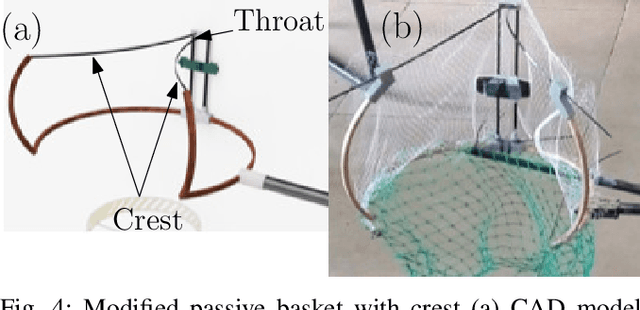
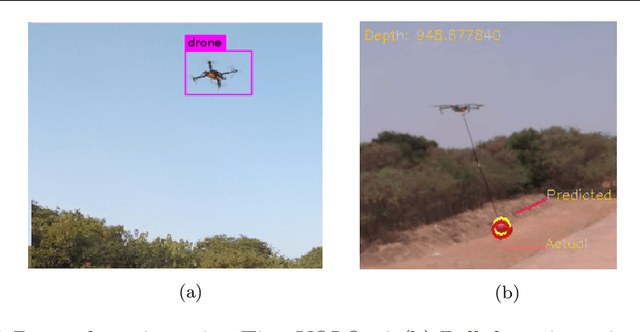
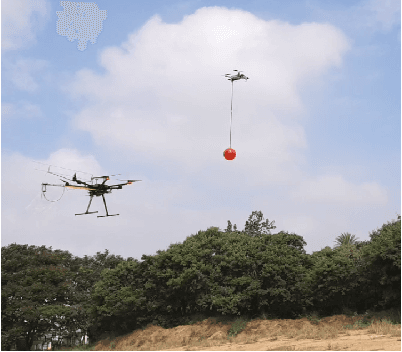
In this paper, we present a novel passive single Degree-of-Freedom (DoF) manipulator design and its integration on an autonomous drone to capture a moving target. The end-effector is designed to be passive, to disengage the moving target from a flying UAV and capture it efficiently in the presence of disturbances, with minimal energy usage. It is also designed to handle target sway and the effect of downwash. The passive manipulator is integrated with the drone through a single Degree of Freedom (DoF) arm, and experiments are carried out in an outdoor environment. The rack-and-pinion mechanism incorporated for this manipulator ensures safety by extending the manipulator beyond the body of the drone to capture the target. The autonomous capturing experiments are conducted using a red ball hanging from a stationary drone and subsequently from a moving drone. The experiments show that the manipulator captures the target with a success rate of 70\% even under environmental/measurement uncertainties and errors.
Design Iterations for Passive Aerial Manipulator
Feb 16, 2021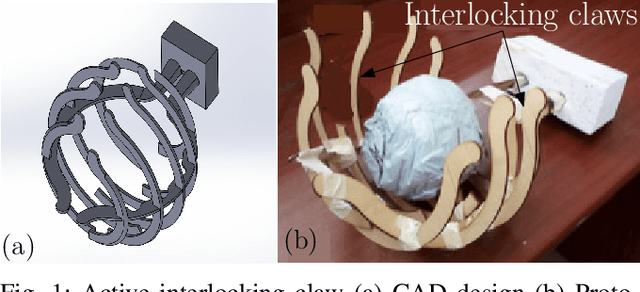
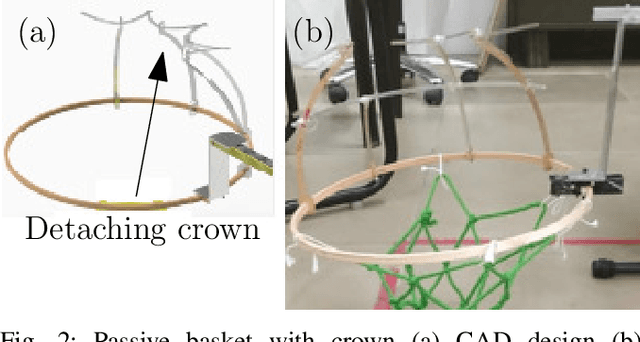
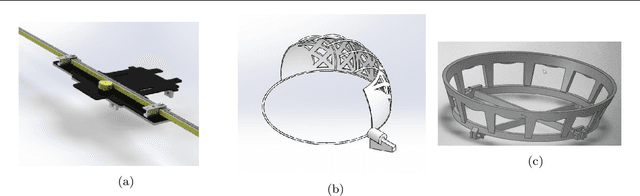
Grabbing a manoeuvring target using drones is a challenging problem. This paper presents the design, development, and prototyping of a novel aerial manipulator for target interception. It is a single Degree of Freedom (DoF) manipulator with passive basket-type end-effector. The proposed design is energy efficient, light weight and suitable for aerial grabbing applications. The detailed design of the proposed manipulation mechanism and a novel in-flight extending propeller guard, is reported in this paper.
CORRIDRONE: Corridors for Drones, An Adaptive On-Demand Multi-Lane Design and Testbed
Dec 02, 2020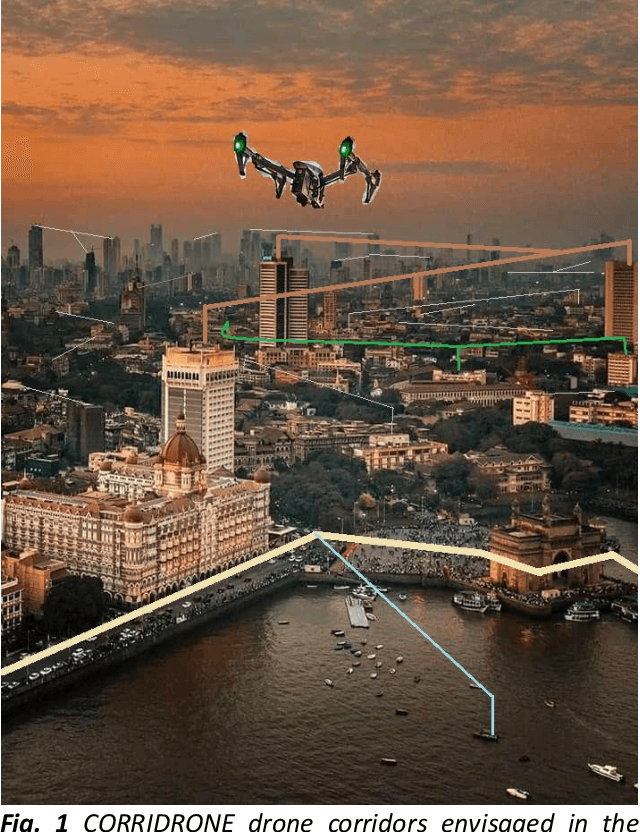
In this article, a novel drone skyway framework called CORRIDRONE is proposed. As the name suggests, this represents virtual air corridors for point-to-point safe passage of multiple drones. The corridors are not permanent but can be set up on demand. A few such scenarios could be those in warehouse/factory floors, package delivery, shore-to-ship delivery, border patrol, etc. Several factors play major roles in the planning and design of such aerial passages. The proposed framework includes many novel features which aid safe and efficient integration of UAVs into the airspace with already available technologies. A several kilometres long test bed is proposed to be set-up at the 1500 acres Challekere campus of Indian Institute of Science, in the state of Karnataka, to design and test the infrastructure required for CORRIDRONE.
Target State Estimation and Prediction for High Speed Interception
Oct 04, 2020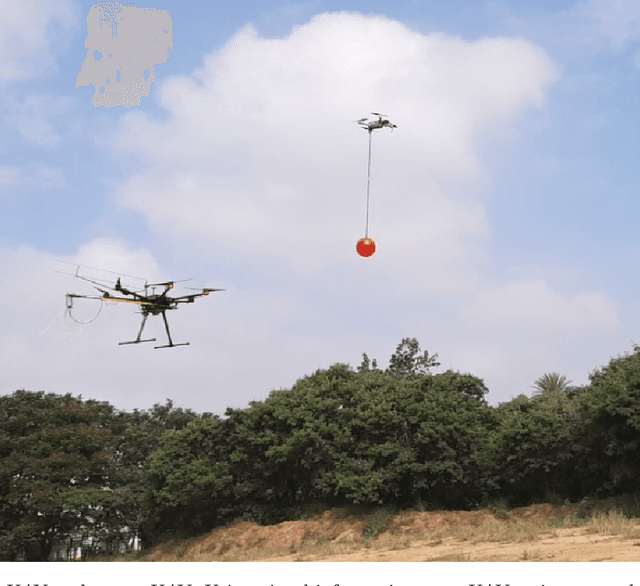
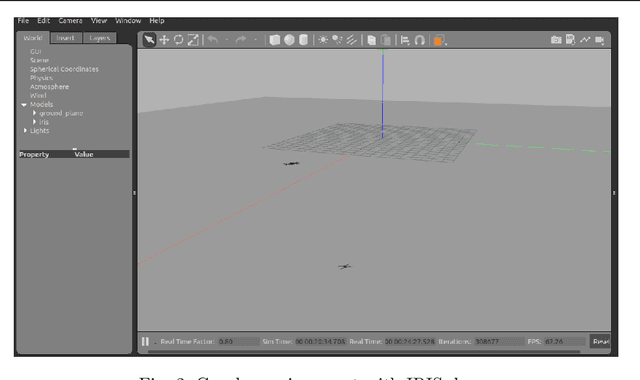
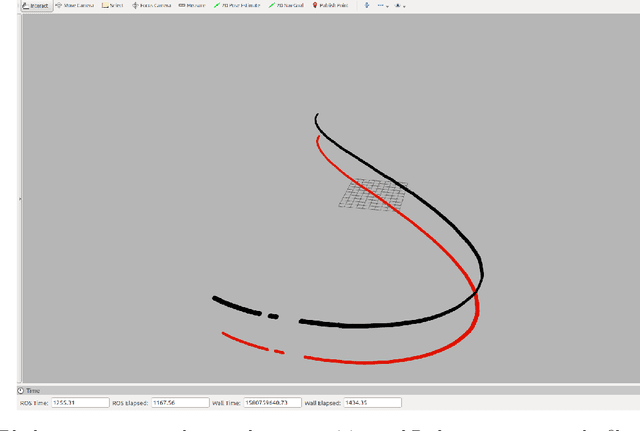
Accurate estimation and prediction of trajectory is essential for interception of any high speed target. In this paper, an extended Kalman filter is used to estimate the current location of target from its visual information and then predict its future position by using the observation sequence. Target motion model is developed considering the approximate known pattern of the target trajectory. In this work, we utilise visual information of the target to carry out the predictions. The proposed algorithm is developed in ROS-Gazebo environment and is verified using hardware implementation.
* arXiv admin note: substantial text overlap with arXiv:2009.00067
Collaborative Tracking and Capture of Aerial Object using UAVs
Oct 04, 2020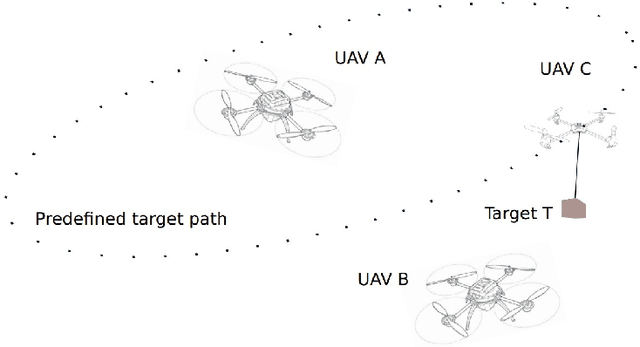
This work details the problem of aerial target capture using multiple UAVs. This problem is motivated from the challenge 1 of Mohammed Bin Zayed International Robotic Challenge 2020. The UAVs utilise visual feedback to autonomously detect target, approach it and capture without disturbing the vehicle which carries the target. Multi-UAV collaboration improves the efficiency of the system and increases the chance of capturing the ball robustly in short span of time. In this paper, the proposed architecture is validated through simulation in ROS-Gazebo environment and is further implemented on hardware.
Vision based Target Interception using Aerial Manipulation
Sep 28, 2020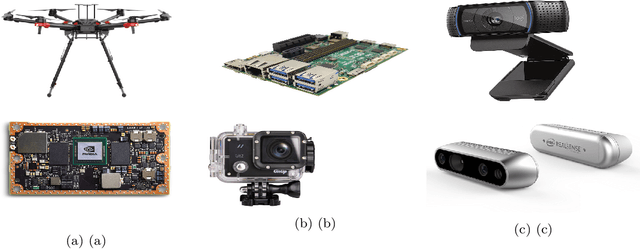
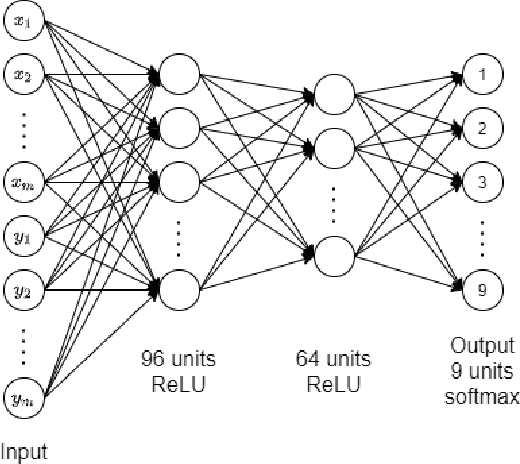
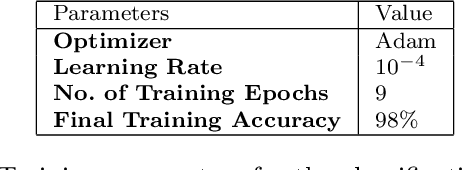
Selective interception of objects in unknown environment autonomously by UAVs is an interesting problem. In this work, vision based interception is carried out. This problem is a part of challenge 1 of Mohammed Bin Zayed International Robotic Challenge, 2020, where, balloons are kept at five random locations for the UAVs to autonomously explore, detect, approach and intercept. The problem requires a different formulation to execute compared to the normal interception problems in literature. This work details the different aspect of this problem from vision to manipulator design. The frame work is implemented on hardware using Robot Operating System (ROS) communication architecture.
Multi-Agent Collaboration for Building Construction
Sep 25, 2020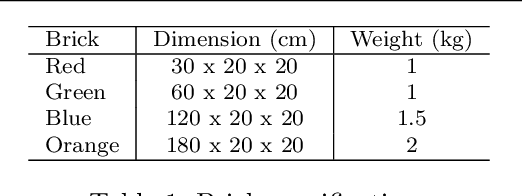
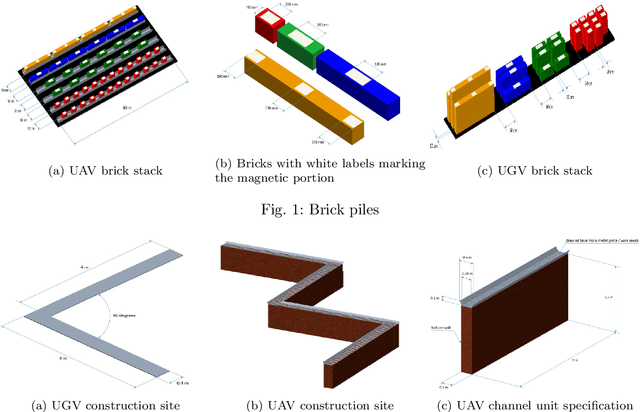
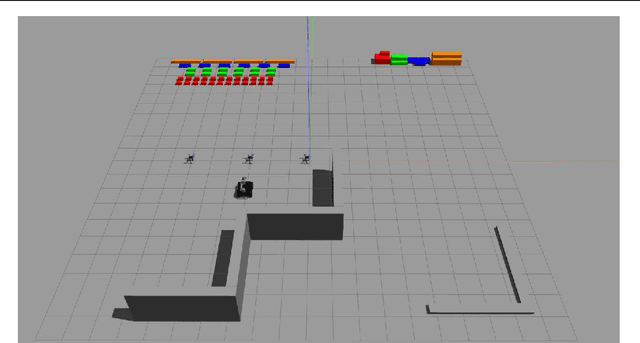
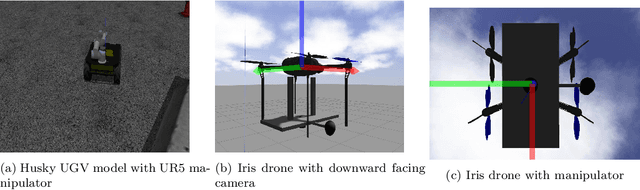
This paper details the algorithms involved and task planner for vehicle collaboration in building a structure. This is the problem defined in challenge 2 of Mohammed Bin Zayed International Robotic Challenge 2020 (MBZIRC). The work addresses various aspects of the challenge for Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicle (UGV). The challenge involves repeated pick and place operations using UAVs and UGV to build two structures of different shape and sizes. The algorithms are implemented using the Robot Operating System (ROS) framework and visualised in Gazebo. The whole developed architecture could readily be implemented in suitable hardware.
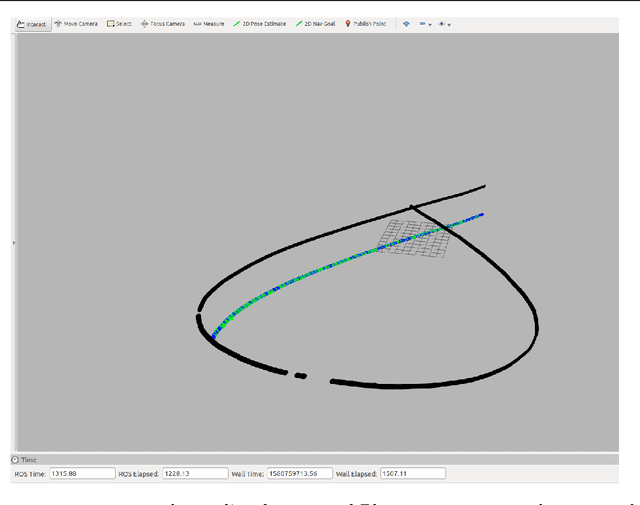
Accurate Prediction and Estimation of 3D-Repetitive-Trajectories using Kalman Filter, Machine Learning and Curve-Fitting Method
Aug 31, 2020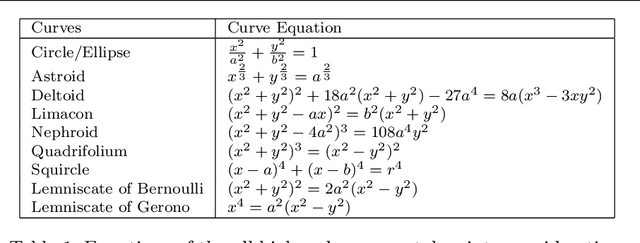
Accurate estimation and prediction of trajectory is essential for the capture of any high speed target. In this paper, an extended Kalman filter (EKF) is used to track the target in the first loop of the trajectory to collect data points and then a combination of machine learning with least-square curve-fitting is used to accurately estimate future positions for the subsequent loops. The EKF estimates the current location of target from its visual information and then predicts its future position by using the observation sequence. We utilize noisy visual information of the target from the three dimensional trajectory to carry out the predictions. The proposed algorithm is developed in ROS-Gazebo environment and is implemented on hardware.
Implementation of Survivor Detection Strategies Using Drones
Apr 04, 2020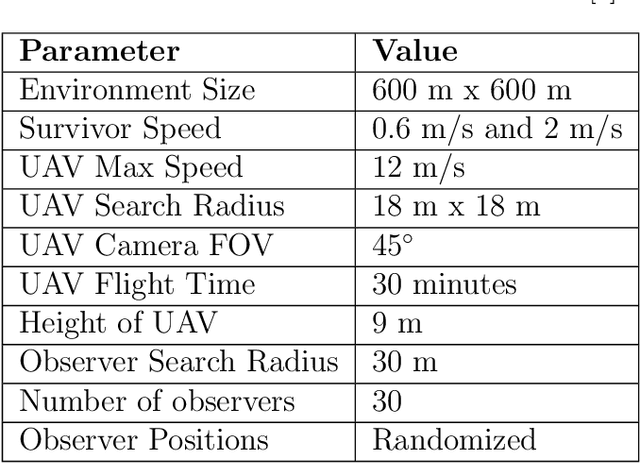
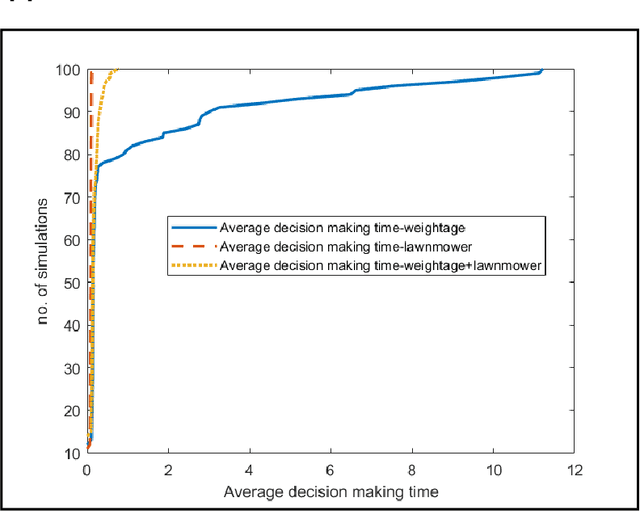
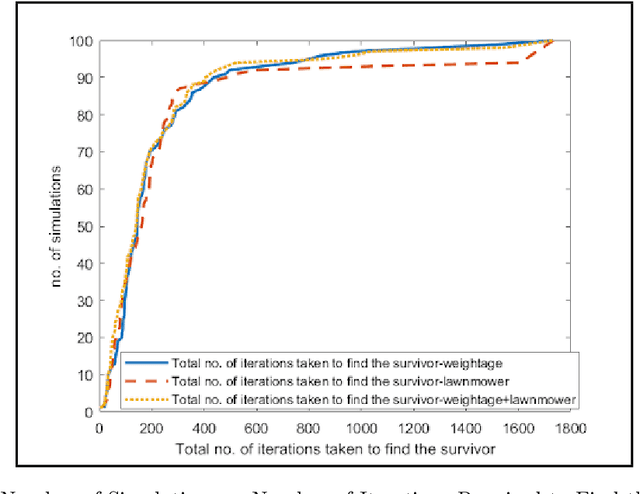
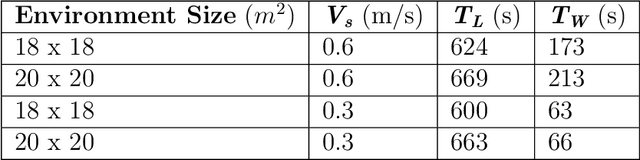
Survivors stranded during floods tend to seek refuge on dry land. It is important to search for these survivors and help them reach safety as quickly as possible. The terrain in such situations however, is heavily damaged and restricts the movement of emergency personnel towards these survivors. Therefore, it is advantageous to utilize Unmanned Aerial Vehicles (UAVs) in cooperation with on-ground first responders to aid search and rescue efforts. In this article we demonstrate an implementation and improvement of the weight-based path planning algorithm using an off-the-shelf UAV. The coordinates of the survivor and their heading is reported by an on-ground observer to the UAV to generate a weighted map of the surroundings for exploration. Each coordinate in the map is assigned a weight which dictates the priority of exploration. These waypoints are then sorted on the basis of their weights to arrive at an ordered list for exploration by the UAV. We developed the model in MATLAB, followed by prototyping on Robot Operating System (ROS) using a 3DR Iris quadcopter. We tested the model on an off-the-shelf UAV by utilizing the MAVROS and MAVLINK capabilities of ROS. During the implementation of the algorithm on the UAV, several additional factors such as unreliable GPS signals and limited field of view which could effect the performance of the model were in effect, despite which the algorithm performed fairly well. We compared our model with conventional algorithms described in the literature, and showed that our implementation outperforms them.