 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual approach for object tracking based on optical flow and swarm intelligence
Aug 15, 2018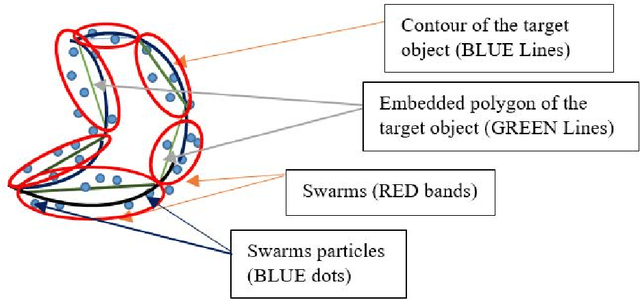
In Computer Vision,object tracking is a very old and complex problem.Though there are several existing algorithms for object tracking, still there are several challenges remain to be solved. For instance, variation of illumination of light, noise, occlusion, sudden start and stop of moving object, shading etc,make the object tracking a complex problem not only for dynamic background but also for static background. In this paper we propose a dual approach for object tracking based on optical flow and swarm Intelligence.The optical flow based KLT(Kanade-Lucas-Tomasi) tracker, tracks the dominant points of the target object from first frame to last frame of a video sequence;whereas swarm Intelligence based PSO (Particle Swarm Optimization) tracker simultaneously tracks the boundary information of the target object from second frame to last frame of the same video sequence.This dual function of tracking makes the trackers very much robust with respect to the above stated problems. The flexibility of our approach is that it can be successfully applicable in variable background as well as static background.We compare the performance of the proposed dual tracking algorithm with several benchmark datasets and obtain very competitive results in general and in most of the cases we obtained superior results using dual tracking algorithm. We also compare the performance of the proposed dual tracker with some existing PSO based algorithms for tracking and achieved better results.
A Modification of Particle Swarm Optimization using Random Walk
Feb 26, 2018
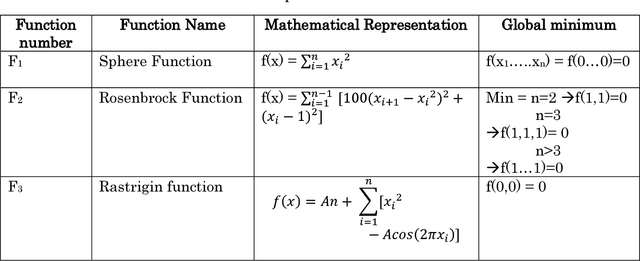
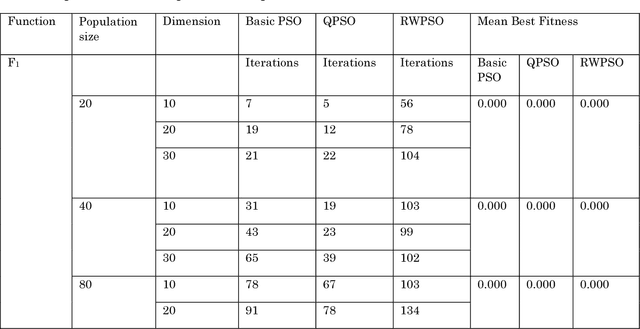
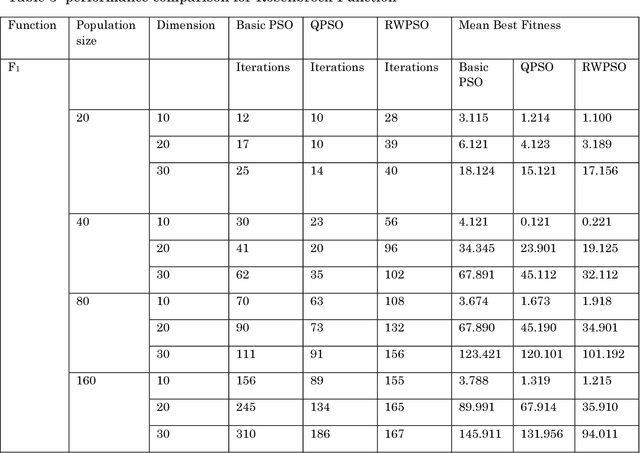
Particle swarm optimization comes under lot of changes after James Kennedy and Russell Eberhart first proposes the idea in 1995. The changes has been done mainly on Inertia parameters in velocity updating equation so that the convergence rate will be higher. We are proposing a novel approach where particles movement will not be depend on its velocity rather it will be decided by constrained biased random walk of particles. In random walk every particles movement based on two significant parameters, one is random process like toss of a coin and other is how much displacement a particle should have. In our approach we exploit this idea by performing a biased random operation and based on the outcome of that random operation, PSO particles choose the direction of the path and move non-uniformly into the solution space. This constrained, non-uniform movement helps the random walking particle to converge quicker then classical PSO. In our constrained biased random walking approach, we no longer needed velocity term (Vi), rather we introduce a new parameter (K) which is a probabilistic function. No global best particle (PGbest), local best particle (PLbest), Constriction parameter (W) are required rather we use a new term called Ptarg which is loosely influenced by PGbest.We test our algorithm on five different benchmark functions, and also compare its performance with classical PSO and Quantum Particle Swarm Optimization (QPSO).This new approach have been shown significantly better than basic PSO and sometime outperform QPSO in terms of convergence, search space, number of iterations.
Detection, Recognition and Tracking of Moving Objects from Real-time Video via Visual Vocabulary Model and Species Inspired PSO
Jun 02, 2017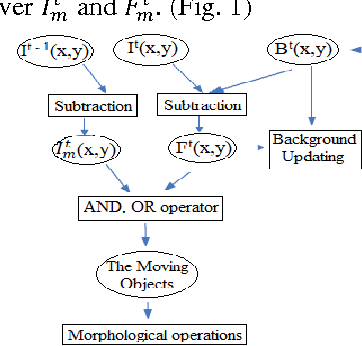
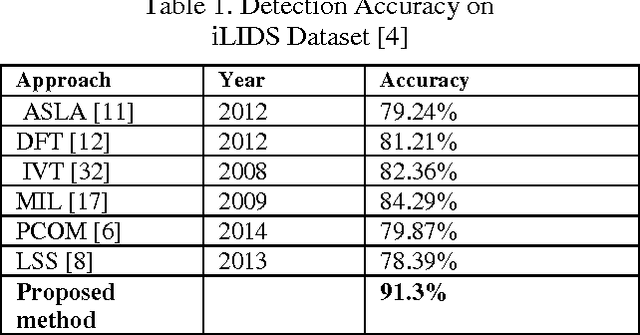
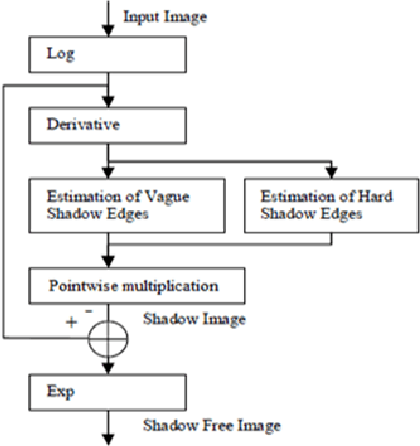
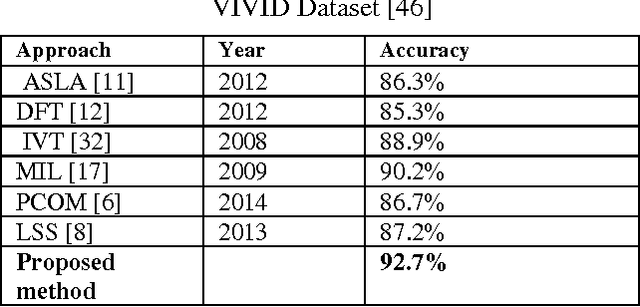
In this paper, we address the basic problem of recognizing moving objects in video images using Visual Vocabulary model and Bag of Words and track our object of interest in the subsequent video frames using species inspired PSO. Initially, the shadow free images are obtained by background modelling followed by foreground modeling to extract the blobs of our object of interest. Subsequently, we train a cubic SVM with human body datasets in accordance with our domain of interest for recognition and tracking. During training, using the principle of Bag of Words we extract necessary features of certain domains and objects for classification. Subsequently, matching these feature sets with those of the extracted object blobs that are obtained by subtracting the shadow free background from the foreground, we detect successfully our object of interest from the test domain. The performance of the classification by cubic SVM is satisfactorily represented by confusion matrix and ROC curve reflecting the accuracy of each module. After classification, our object of interest is tracked in the test domain using species inspired PSO. By combining the adaptive learning tools with the efficient classification of description, we achieve optimum accuracy in recognition of the moving objects. We evaluate our algorithm benchmark datasets: iLIDS, VIVID, Walking2, Woman. Comparative analysis of our algorithm against the existing state-of-the-art trackers shows very satisfactory and competitive results.
Object Tracking based on Quantum Particle Swarm Optimization
May 24, 2017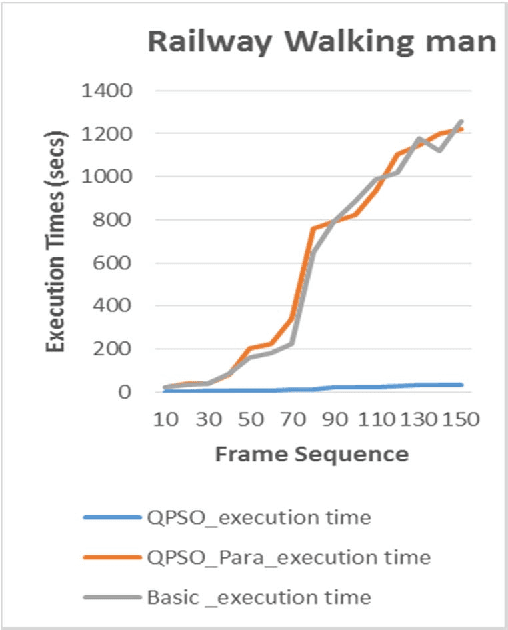
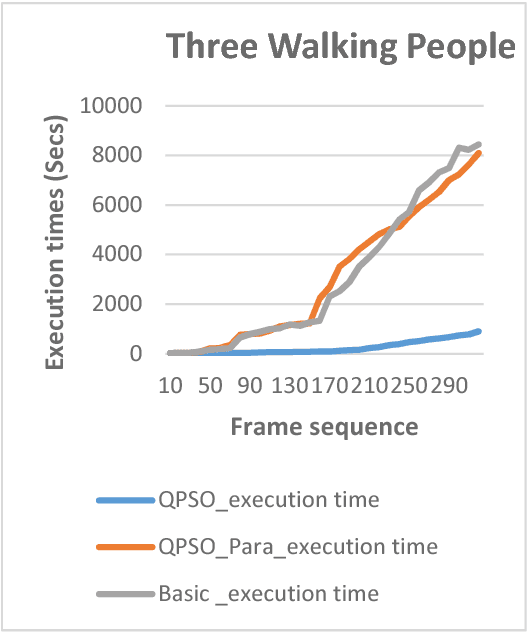
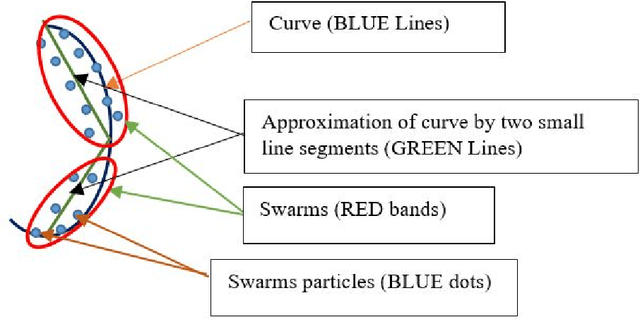
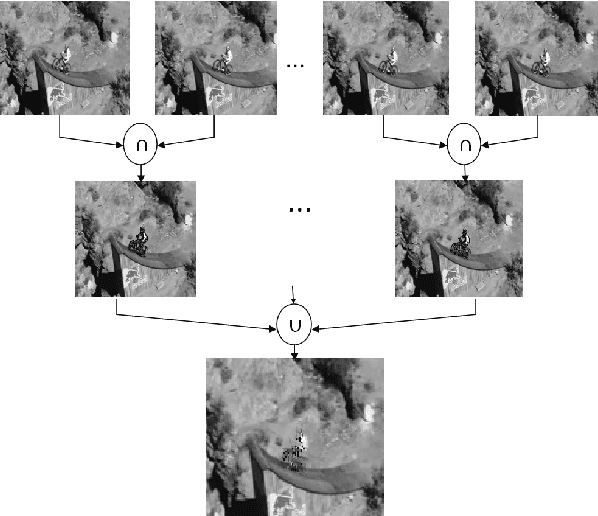
In Computer Vision domain, moving Object Tracking considered as one of the toughest problem.As there so many factors associated like illumination of light, noise, occlusion, sudden start and stop of moving object, shading which makes tracking even harder problem not only for dynamic background but also for static background.In this paper we present a new object tracking algorithm based on Dominant points on tracked object using Quantum particle swarm optimization (QPSO) which is a new different version of PSO based on Quantum theory. The novelty in our approach is that it can be successfully applicable in variable background as well as static background and application of quantum PSO makes the algorithm runs lot faster where other basic PSO algorithm failed to do so due to heavy computation.In our approach firstly dominants points of tracked objects detected, then a group of particles form a swarm are initialized randomly over the image search space and then start searching the curvature connected between two consecutive dominant points until they satisfy fitness criteria. Obviously it is a Multi-Swarm approach as there are multiple dominant points, as they moves, the curvature moves and the curvature movement is tracked by the swarm throughout the video and eventually when the swarm reaches optimal solution , a bounding box drawn based on particles final position.Experimental results demonstrate this proposed QPSO based method work efficiently and effectively in visual object tracking in both dynamic and static environments and run time shows that it runs closely 90% faster than basic PSO.in our approach we also apply parallelism using MatLab Parfor command to show how very less number of iteration and swarm size will enable us to successfully track object.
An Efficient Approach for Object Detection and Tracking of Objects in a Video with Variable Background
May 11, 2017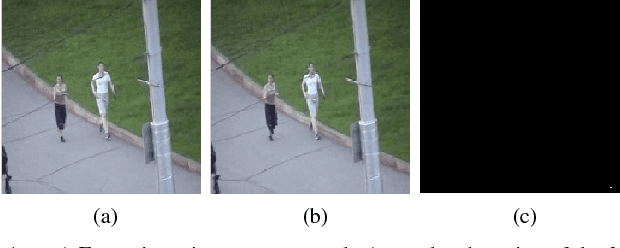
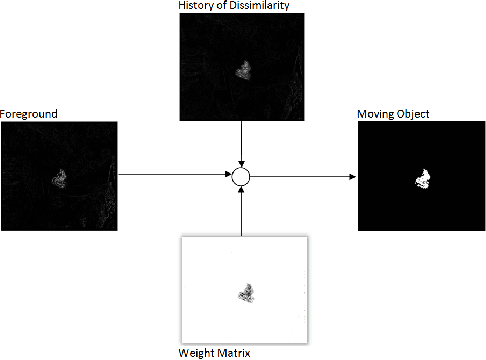
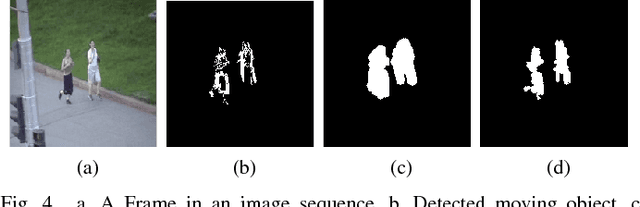
This paper proposes a novel approach to create an automated visual surveillance system which is very efficient in detecting and tracking moving objects in a video captured by moving camera without any apriori information about the captured scene. Separating foreground from the background is challenging job in videos captured by moving camera as both foreground and background information change in every consecutive frames of the image sequence; thus a pseudo-motion is perceptive in background. In the proposed algorithm, the pseudo-motion in background is estimated and compensated using phase correlation of consecutive frames based on the principle of Fourier shift theorem. Then a method is proposed to model an acting background from recent history of commonality of the current frame and the foreground is detected by the differences between the background model and the current frame. Further exploiting the recent history of dissimilarities of the current frame, actual moving objects are detected in the foreground. Next, a two-stepped morphological operation is proposed to refine the object region for an optimum object size. Each object is attributed by its centroid, dimension and three highest peaks of its gray value histogram. Finally, each object is tracked using Kalman filter based on its attributes. The major advantage of this algorithm over most of the existing object detection and tracking algorithms is that, it does not require initialization of object position in the first frame or training on sample data to perform. Performance of the algorithm is tested on benchmark videos containing variable background and very satisfiable results is achieved. The performance of the algorithm is also comparable with some of the state-of-the-art algorithms for object detection and tracking.
Object Detection by Spatio-Temporal Analysis and Tracking of the Detected Objects in a Video with Variable Background
Apr 28, 2017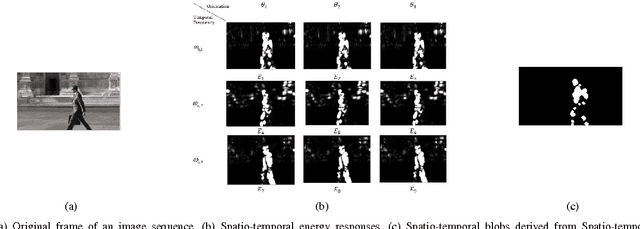
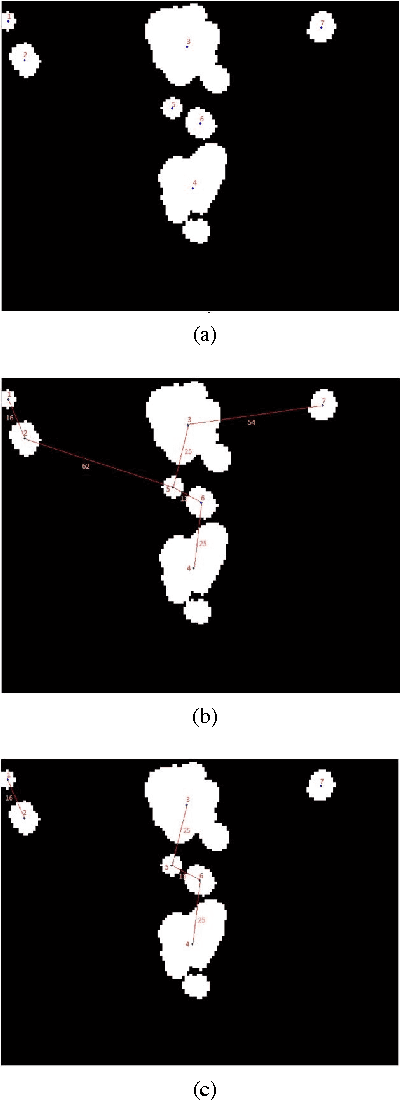
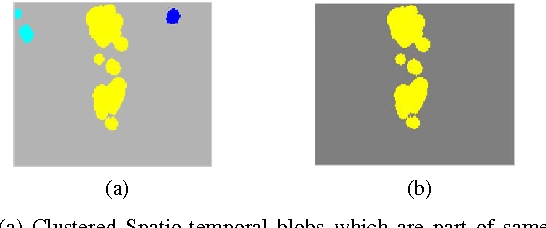
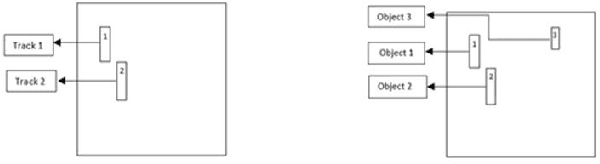
In this paper we propose a novel approach for detecting and tracking objects in videos with variable background i.e. videos captured by moving cameras without any additional sensor. In a video captured by a moving camera, both the background and foreground are changing in each frame of the image sequence. So for these videos, modeling a single background with traditional background modeling methods is infeasible and thus the detection of actual moving object in a variable background is a challenging task. To detect actual moving object in this work, spatio-temporal blobs have been generated in each frame by spatio-temporal analysis of the image sequence using a three-dimensional Gabor filter. Then individual blobs, which are parts of one object are merged using Minimum Spanning Tree to form the moving object in the variable background. The height, width and four-bin gray-value histogram of the object are calculated as its features and an object is tracked in each frame using these features to generate the trajectories of the object through the video sequence. In this work, problem of data association during tracking is solved by Linear Assignment Problem and occlusion is handled by the application of kalman filter. The major advantage of our method over most of the existing tracking algorithms is that, the proposed method does not require initialization in the first frame or training on sample data to perform. Performance of the algorithm has been tested on benchmark videos and very satisfactory result has been achieved. The performance of the algorithm is also comparable and superior with respect to some benchmark algorithms.
Theorem Proving Based on Semantics of DNA Strand Graph
Feb 15, 2017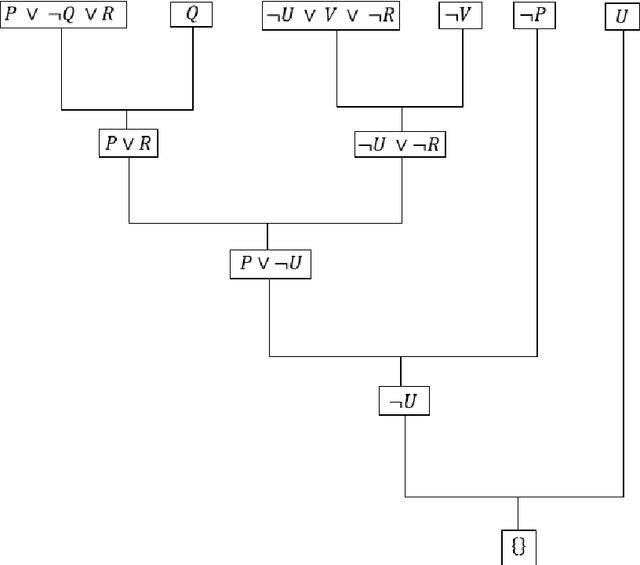
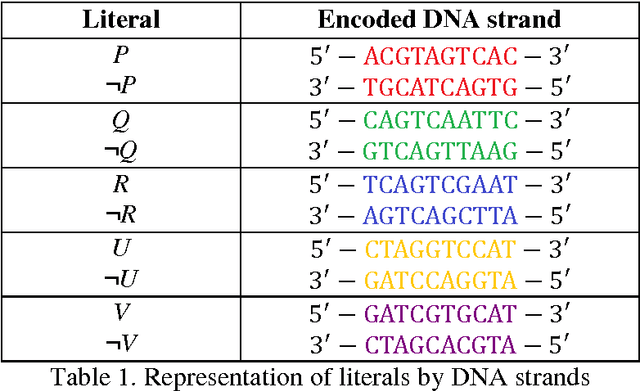
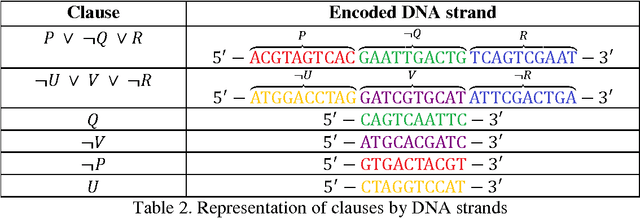
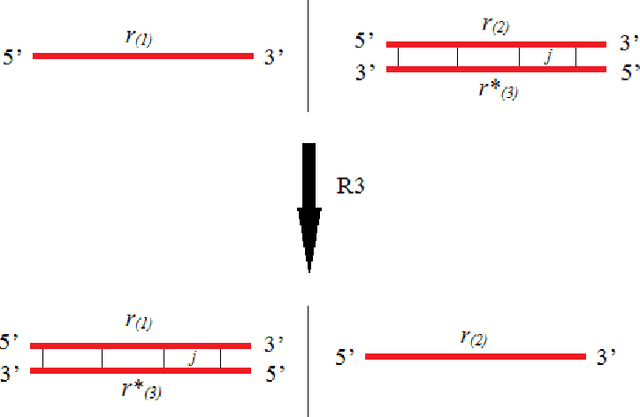
Because of several technological limitations of traditional silicon based computing, for past few years a paradigm shift, from silicon to carbon, is occurring in computational world. DNA computing has been considered to be quite promising in solving computational and reasoning problems by using DNA strands. Resolution, an important aspect of automated theorem proving and mathematical logic, is a rule of inference which leads to proof by contradiction technique for sentences in propositional logic and first-order logic. This can also be called refutation theorem-proving. In this paper we have shown how the theorem proving with resolution refutation by DNA computation can be represented by the semantics of process calculus and strand graph.